Multiscale Thermo-Dynamics: Introduction to GENERIC 9783110350951, 9783110350944
One common feature of new emerging technologies is the fusion of the very small (nano) scale and the large scale enginee
173 36 2MB
English Pages 292 [294] Year 2018
Polecaj historie


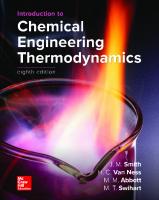







Table of contents :
Preface
Contents
1. Introduction
2. Levels of description
3. Hamiltonian mechanics
4. Irreversible evolution
5. Reversible and irreversible evolution
6. Multicomponent systems
7. Contact geometry
A Mathematical aspects
Bibliography
Index
Citation preview
Michal Pavelka, Václav Klika, Miroslav Grmela Multiscale Thermo-Dynamics
Also of Interest Non-equilibrium thermodynamics and physical kinetics Halid Bikkin, Igor I. Lyapilin, 2014 ISBN 978-3-11-033769-3, e-ISBN (PDF) 978-3-11-033835-5, e-ISBN (EPUB) 978-3-11-037300-4
The Properties of Energetic Materials. Sensitivity, Physical and Thermodynamic Properties Mohammad Hossein Keshavarz, Thomas M. Klapötke 2017 ISBN 978-3-11-052187-0, e-ISBN (PDF) 978-3-11-052188-7, e-ISBN (EPUB) 978-3-11-052195-5 Physics of Wetting. Phenomena and Applications of Fluids on Surfaces Edward Yu. Bormashenko, 2017 ISBN 978-3-11-044480-3, e-ISBN (PDF) 978-3-11-044481-0, e-ISBN (EPUB) 978-3-11-043716-4
Physics of Energy Conversion Katharina Krischer, Konrad Schönleber, 2015 ISBN 978-1-5015-0763-2, e-ISBN (PDF) 978-1-5015-1063-2, e-ISBN (EPUB) 978-1-5015-0268-2
Inorganic Trace Analytics. Trace Element Analysis and Speciation Henryk Matusiewicz, Ewa Bulska, 2017 ISBN 978-3-11-037194-9, e-ISBN (PDF) 978-3-11-036673-0, e-ISBN (EPUB) 978-3-11-039245-6
Michal Pavelka, Václav Klika, Miroslav Grmela
Multiscale Thermo-Dynamics | Introduction to GENERIC
Physics and Astronomy Classification Scheme 2010 05.70.Ln, 05.70.-a, 46.35.+z, 05.60.-k, 02.40.Yy Authors Prof. Dr. Michal Pavelka Mathematical Institue Faculty of Mathematics and Physics Charles University Sokolovská 49/83 186 75 Prague 8 Czech Republic [email protected]
Prof. Dr. Miroslav Grmela Ecole Polytechnique de Montréal C.P.6079 suc. Centre-ville Québec H3C 3A7 Canada [email protected]
Prof. Dr. Václav Klika Czech Technical University Department of Mathematics – FNSPE Trojanova 13 120 00 Prague Czech Republic vaclav.klika@fjfi.cvut.cz
ISBN 978-3-11-035094-4 e-ISBN (PDF) 978-3-11-035095-1 e-ISBN (EPUB) 978-3-11-038753-7 Library of Congress Cataloging-in-Publication Data Names: Klika, Vaclav, author. | Pavelka, Michal, author. | Grmela, Miroslav, author. Title: Multiscale thermo-dynamics : introduction to GENERIC / Vaclav Klika, Michal Pavelka, Miroslav Grmela. Description: Berlin ; Boston : Walter de Gruyter GmbH, [2018] | Includes bibliographical references and index. Identifiers: LCCN 2018018143| ISBN 9783110350944 (print) | ISBN 9783110350951 (e-book (pdf) | ISBN 9783110387537 (e-book (epub) Subjects: LCSH: Nonequilibrium thermodynamics. | Multiscale modeling. Classification: LCC QC318.I7 .K535 2018 | DDC 536/.7–dc23 LC record available at https://lccn.loc.gov/2018018143 Bibliographic information published by the Deutsche Nationalbibliothek The Deutsche Nationalbibliothek lists this publication in the Deutsche Nationalbibliografie; detailed bibliographic data are available on the Internet at http://dnb.dnb.de. © 2018 Walter de Gruyter GmbH, Berlin/Boston Cover image: Fine Art/Kontributor/Corbis Historical Typesetting: le-tex publishing services GmbH, Leipzig Printing and binding: CPI books GmbH, Leck www.degruyter.com
| M.P. and V.K. dedicate this book to their teachers František Maršík and Miroslav Grmela, to their irreplaceable families, to Zuzana, Adam, Markéta, Dana, Jakub, Anna, and Barbora, and to their relatives. M.G. dedicates this book to his students Michal Pavelka and Václav Klika, and to Viera, Sonia, Sylvia and grandchildren. We would also like to thank our friends and colleagues Oğul Esen, Ilya Peshkov, Petr Vágner, Ondřej Souček, Vít Průša, Karel Tůma, Jaroslav Hron, Petr Pelech, Martin Sýkora, Mark Dostalík, and Jiří Malík for invaluable discussions of ideas presented in this book. It would also be impossible to finish this book without the creative environment and freedom provided by Josef Málek and Juraj Kosek. Finally, we are indebted to Hans Christian Öttinger for precious discussions. We would also like to thank the Czech Grant Agency (grant number 17-15498Y) and Natural Sciences and Engineering Research Council of Canada (grants RGPAS 462034 and RGPIN 06504) for supporting this work. V.K. is grateful for support from the International Mobility of Researchers – MSCA-IF in Czech Technical University, as well as support from the Mathematical Institute at the University of Oxford in providing a very kind and inspiring environment. This work has been supported by Charles University Research program No. UNCE/SCI/023.
Preface The matter was completely clear. Schweik’s spontaneous utterance made it unnecessary to ask a whole lot of questions, and there remained only some of the most important ones, the answers to which were to corroborate Schweik’s real opinion, thus: “Is radium heavier than lead?” “I’ve never weighed it, sir,” answered Schweik with his sweet smile. “Do you believe in the end of the world?” “I have to see the end of the world first,” replied Schweik in an offhand manner, “but I’m sure it won’t come my way tomorrow.” “Could you measure the diameter of the globe?” “No, that I couldn’t, sir,” answered Schweik, “but now I’ll ask you a riddle, gentlemen. There’s a three-storied house with eight windows on each story. On the roof there are two gables and two chimneys. There are two tenants on each story. And now, gentlemen, I want you to tell me in what year the house porter’s grandmother died?” The medical authorities looked at each other meaningfully, but nevertheless one of them asked one more question: “Do you know the maximum depth of the Pacific Ocean?” “I’m afraid I don’t, sir,” was the answer, “but it’s pretty sure to be deeper than what the river is just below Prague.” The chairman of the commission curtly asked, “Is that enough?” But one member inquired further: “How much is 12 897 times 13 863?” “729,” answered Schweik without moving an eyelash. “I think that’s quite enough,” said the chairman of the commission. “You can take this prisoner back to where he came from.” “Thank you, gentlemen,” said Schweik respectfully, “it’s quite enough for me, too.” – Jaroslav Hašek (translated by Paul Selver), The Good Soldier Švejk [1].
https://doi.org/10.1515/9783110350951-201
Contents Preface | VII 1
Introduction | 1
2 Levels of description | 3 2.1 Equilibrium thermodynamics | 3 2.1.1 Fundamental thermodynamic relation | 4 2.1.2 One-homogeneity | 6 2.2 First law of thermodynamics | 7 2.3 Second law of thermodynamics | 7 2.4 Levels of description | 9 2.4.1 Nonequilibrium fundamental thermodynamic relation | 9 2.4.2 Thermodynamic potential | 10 2.5 Legendre transformation | 10 2.5.1 Helmholtz free energy | 10 2.5.2 Gibbs free energy | 12 2.5.3 Enthalpy | 13 2.5.4 Heat capacities | 13 2.6 Small body in large medium | 14 2.6.1 Thermodynamic potential | 14 2.6.2 Free energy | 16 2.6.3 Heat of reaction | 17 2.6.4 Maximum work | 17 2.6.5 Braun–Le Chatelier principle | 18 2.7 What is entropy? | 21 2.7.1 Uncertainty and information entropy | 22 2.7.2 Principle of maximum entropy | 25 2.7.3 Microcanonical distribution | 27 2.7.4 Canonical distribution | 28 2.7.5 Grand canonical distribution | 31 2.7.6 Liouville entropy | 32 2.7.7 Boltzmann entropy | 33 2.7.8 Hydrodynamic entropy of ideal gases | 35 2.7.9 Fundamental thermodynamic relation of ideal gases | 36 2.7.10 Entropy of photons | 38 2.7.11 Entropy of van der Waals fluid | 40 2.7.12 Equilibrium statistical mechanics and loss of convexity | 47 2.7.13 Suspension of elastic dumbbells | 47 2.7.14 Is entropy subjective or objective? | 50
X | Contents
3 Hamiltonian mechanics | 53 3.1 Classical mechanics | 53 3.1.1 Newton’s laws | 53 3.1.2 Hamilton canonical equations | 53 3.1.3 Variation principle | 54 3.1.4 Symmetries | 55 3.1.5 Summary | 57 3.2 General Hamiltonian evolution | 58 3.2.1 Poisson bracket | 58 3.2.2 Hamiltonian vector field | 61 3.2.3 Tensor fields | 62 3.2.4 Lie derivative | 63 3.2.5 Tangent and cotangent bundles | 64 3.2.6 Conserved quantities | 65 3.2.7 Lie algebra and Lie groups | 65 3.2.8 Lie algebra dual and Lie–Poisson bracket | 67 3.2.9 Jacobi identity | 68 3.2.10 Summary | 68 3.3 Dynamics of a rigid body | 69 3.4 Liouville equation | 71 3.5 Projection of Poisson brackets | 75 3.6 From Liouville to Boltzmann Poisson bracket | 76 3.7 Fluid mechanics | 78 3.7.1 From Boltzmann to the Poisson bracket of fluid mechanics | 78 3.7.2 Euler compressible equations | 81 3.7.3 Local thermodynamic equilibrium | 82 3.7.4 Weakly nonlocal fluid | 83 3.7.5 Poisson bivector | 84 3.7.6 Clebsch variables | 88 3.8 Mechanics of deformation | 89 3.8.1 Kinematics of labels | 90 3.8.2 Geometric derivation | 93 3.8.3 Kinematics of a general distortion matrix | 94 3.8.4 Distortion with labels | 96 3.8.5 Alternative derivation of kinematics of a distortion matrix | 97 3.8.6 Kinematics of the left Cauchy–Green (or Finger) tensor | 97 3.8.7 Elasticity | 100 3.8.8 Non-Newtonian fluids | 101 3.9 Mechanics of heat | 103 3.10 Electromagnetic field | 106 3.10.1 Maxwell equations in a vacuum | 106 3.10.2 Charged particle in electromagnetic field | 108
Contents | XI
3.10.3 3.10.4 3.10.5 3.10.6
Kinetic electrodynamics | 109 Electromagnetohydrodynamics | 112 Magnetohydrodynamics | 122 Electrohydrodynamics | 122
4 4.1 4.1.1 4.1.2 4.1.3 4.1.4 4.1.5 4.1.6 4.1.7 4.2 4.3 4.4 4.4.1 4.4.2 4.4.3 4.4.4 4.4.5 4.5 4.5.1 4.6 4.6.1 4.6.2 4.6.3
Irreversible evolution | 125 Time reversal transformation | 125 Particles | 125 General state variables | 127 Parity changes with level | 128 Mass, energy and entropy | 128 Hamiltonian evolution is reversible | 129 Irreversible evolution equations | 130 Dissipation | 130 Why MaxEnt? | 131 On the origin of the second law | 132 Entropic representation | 133 Gradient dynamics | 133 Isothermal dissipation | 136 Thermodynamic forces and fluxes | 137 Maxwell–Onsager reciprocal relations | 138 Quasilinear irreversible evolution | 139 Energetic representation | 139 Local gradient dynamics | 140 Examples | 142 Local dissipation | 142 Weakly nonlocal dissipation | 142 Strongly nonlocal dissipation. Boltzmann collision integral | 145
5 5.1 5.1.1 5.1.2 5.1.3 5.2 5.3 5.3.1 5.3.2 5.3.3 5.4 5.5 5.6
Reversible and irreversible evolution | 147 GENERIC | 147 Reversible and irreversible evolution equations | 147 Infinite dimensions | 148 Lyapunov function | 148 Onsager–Casimir reciprocal relations | 149 Reductions and extensions | 150 Dynamic MaxEnt reduction | 151 Ehrenfest reduction | 153 Extensions | 157 Hyperbolic and Fourier heat conduction | 162 Left Cauchy–Green tensor | 164 Kinetic theory | 166
XII | Contents
5.6.1 5.6.2 5.6.3 5.7 5.7.1 5.7.2 5.7.3 5.7.4 5.8 5.9 5.9.1 5.9.2 5.10 5.10.1 5.10.2 5.10.3 6 6.1 6.1.1 6.1.2 6.1.3 6.1.4 6.1.5 6.1.6 6.2 6.2.1 6.2.2 6.2.3 6.2.4 6.2.5 6.3 6.3.1 6.3.2 6.3.3 6.3.4 6.3.5 6.4 6.4.1 6.4.2
Boltzmann equation | 167 Grad hierarchy | 170 One-and-two-point kinetic theory | 176 Complex fluids | 177 Weak nonlocality in space and momentum | 178 Conformation tensor | 180 Reynolds stress | 184 Nonlocal vorticity | 187 Symmetric hyperbolic thermodynamically consistent (SHTC) equations | 188 Electromagnetic radiation | 190 Kinetic theory | 190 Radiation hydrodynamics | 191 Fiber suspensions | 192 Rigid dumbbell | 193 Rigid rod | 195 Summary | 199 Multicomponent systems | 201 Entropy of binary mixtures | 201 Binary Liouville entropy | 201 Binary Boltzmann entropy | 201 Binary hydrodynamic entropy for ideal gases | 206 Classical irreversible thermodynamic binary entropy of ideal gases | 207 Binary mechanical equilibrium | 209 Binary Sackur–Tetrode relation | 211 Hierarchy of Poisson brackets for binary mixtures | 212 Liouville Poisson bracket for binary mixtures | 212 Boltzmann Poisson bracket for binary mixtures | 213 Binary fluid mechanics | 214 Poisson bracket for mixtures in CIT | 216 Mixture as a one-component fluid | 217 Dissipation in mixtures | 218 Dissipation in binary kinetic theory | 218 Dissipation in binary hydrodynamics | 218 Dissipation in ternary hydrodynamics | 223 Dissipation in isothermal mechanical equilibrium | 227 Chemical reactions | 228 Mixtures in electromagnetic fields | 233 Binary kinetic electrodynamics | 234 Binary electromagnetohydrodynamics | 235
Contents |
6.4.3 6.4.4 6.4.5
Classical binary electromagnetohydrodynamics | 239 Binary electrohydrodynamics | 240 Binary magnetohydrodynamics | 241
7 7.1 7.2 7.3
Contact geometry | 243 Motivation | 243 Contact GENERIC | 244 Observations | 247
A A.1 A.2 A.3 A.4 A.5
Mathematical aspects | 251 Partial derivatives | 251 Functional derivatives | 251 Legendre transformation | 254 Note about multiplication of delta functions | 257 Manipulations with Poisson brackets | 260
Bibliography | 267 Index | 275
XIII
1 Introduction The process of acquiring knowledge is multiscale (multilevel). Autonomous systems (theories or, as we shall say, levels of description) arise as a result of attempts to respond to particular needs, to organize and understand results of certain types of experimental observations, and to express insights inspired by the observations. Other needs, other experimental observations, and other insights lead to other levels of description. Thermodynamics investigates relations among the levels. Initially, classical equilibrium thermodynamics emerged in the investigation of the relation between macroscopic and microscopic mechanics. The association between atomistic mechanics and heat (first recognized fully in the Gibbs equilibrium statistical mechanics) was initially recognized only partially (by combining heat with mechanical energy in the first law of classical thermodynamics). The passage from a level involving more details (we call it a more microscopic level or higher level) to a level involving less details (we call it mesoscopic, more macroscopic level or lower level) involves ignorance of details and a focus on overall features. However unimportant the ignored details are, they still influence the overall features. How do we express their influence? Through the new potential called entropy. The ignored details drive the entropy to its maximum (maximum entropy principle, or in an abbreviated form, MaxEnt principle). Where does the entropy (as a function of the state variables) come from? Depending on the particular nature of the levels that we are relating, this question can be answered in many different ways (Section 2.7). There is however one general answer. Viewing the macroscopic system under investigation from the point of view of the more microscopic theory, the more macroscopic description becomes possible only when the system is particularly prepared. The entropy is the potential driving the preparation process (Section 2.7). In the case of the relation studied in classical equilibrium thermodynamics, the preparation process consists of leaving the system for a sufficiently long time undisturbed. The system reaches the state, called a thermodynamic equilibrium state, at which the level of classical equilibrium thermodynamics is found to describe well the observed behavior. For example, for ideal gases as the macroscopic systems under investigation, the preparation process is well described by the Boltzmann kinetic equation. The potential generating the time evolution is the Boltzmann entropy (Section 2.7.7) and at its maximum it becomes the equilibrium entropy of an ideal gas (Section 2.7.9). The tower of Babel on the cover of this book is an allegorical representation of thermodynamics. The levels represent the levels of description and thermodynamics provides the communication among them. The incompleteness of the construction is an invitation to join the effort to complete it.
https://doi.org/10.1515/9783110350951-001
2 Levels of description According to our own experience we note that mastering the concepts of thermodynamics is a long (and perhaps never-ending) process. One reason for this difficulty with thermodynamics might lie in the lack of solid and clear foundations that would be unambiguous. For example, key concepts of entropy, internal energy, and heat are both intuitive and unclear. Intuitive in a sense that one can understand the concept of measure of orderliness or kinetic energy of atoms and molecules. However, the macroscopic quantities appearing, for example, in the first law of thermodynamics are not unambiguously connected to these statistical mechanics interpretations. This is the reason why we are inclined towards the concept of Herbert B. Callen’s treatment of equilibrium thermodynamics [2], where the chosen axiomatic formulation of thermodynamics is somewhat unclearly related to underlying physics in places but enables clear development of all the key concepts for equilibrium thermodynamics, including internal energy, heat, or entropy. The connection between information theory and entropy that we consider, particularly elucidating [3], will then serve as the bridge from the axiomatic formulation to microscopic physics. Consequently, it is natural that one faces even more difficulties in understanding and developing nonequilibrium thermodynamics. The role of entropy is somewhat diminished as its knowledge would not result in complete description and knowledge of the system at hand as opposed to equilibrium thermodynamics. Additional concepts have to be introduced and we present one possible approach in this monograph. Let us stress from the start that we believe that entropy (in nonequilibrium thermodynamics) is dependent on the choice of two levels of description between which time evolution of interest is taking place.
2.1 Equilibrium thermodynamics When speaking about thermodynamics, it is equilibrium thermodynamics (ET) that one usually has in mind. Indeed, ET is capable of describing the majority of phenomena occurring in mechanical or chemical engineering and physics in general. Let us therefore start with a short summary of equilibrium thermodynamics. ET was developed based on experience with heat engines in the eighteenth and nineteenth centuries by S. Carnot, Lord Kelvin, R. Clausius, J. C. Maxwell, L. Boltzmann, J. D. van der Waals, and J. W. Gibbs. The latter equipped thermodynamics with a geometrical structure and summarized it in his works [4]. Modern formulation of equilibrium thermodynamics can be found for instance in textbooks of L. D. Landau & E. M. Lifshitz [5] and H. B. Callen [2]. Although equilibrium thermodynamics has a long history, it is still subject to fruitful research, for instance [6].
https://doi.org/10.1515/9783110350951-002
4 | 2 Levels of description
Historically, the first motivation for development of thermodynamics was transfer of heat in heat engines. A great result of the gained experience was the concept of entropy, a function that grows for any isolated system and which is maximal in thermodynamic equilibrium. What is heat, entropy, and internal energy in equilibrium thermodynamics? We try to provide brief answers in this section, which is mainly based on the monograph [2].
2.1.1 Fundamental thermodynamic relation Internal energy U of a system is the energy difference of the system in a given state relative to a fiducial state. But what is energy E? We may define difference in energy E as the mechanical work (which one can measure) done in taking an adiabatically enclosed system (walls impermeable to heat) between two given states, where we are assuming measurability, i.e., that the work done is determined entirely by the states, independent of all external conditions. Such experimental systems and walls indeed exist as e.g., Joule has shown. As an immediate consequence one can define heat (flux) to a system during a process not changing composition of the system as the difference in internal energy between the final and initial states diminished by the work done in that process. This is exactly the contents of the first law of thermodynamics, which can be viewed in this light as a definition of heat that represents a way of energy transfer. Entropy S is a new potential, of nonmechanical origin, that has emerged in mesoscopic dynamics in order to deal with ignored details. All entropies share a core of common properties but otherwise they depend on the starting and the target levels and also on the macroscopic system under consideration. In equilibrium thermodynamics one can introduce entropy via several postulates with entropy being defined only for equilibrium states. The existence of entropy is indeed nontrivial, as is highlighted by Maxwell relations being a pure consequence of entropy existence and revealing relations among seemingly unrelated quantities. For example, consider the van’t Hoff equation with chemical affinity Aρ [J kmol−1 ], extent of reaction ξ ρ [kmol m−3 ], equilibrium constant K ρ , and enthalpy per unit volume h [J m−3 ] A
∂ ρ ∂ ln K ρ (p, T) 1 ∂h ( RT ) =( ( ) ) = 2 ∂ξ ∂T p,ξ ∂T RT ρ T,p,ξ p ρ
ρ
or the relation of specific heats and speed of sound propagation c = √(
1.
∂p ) . ∂ρ s
Following Callen equilibrium, entropy is defined via these postulates: There exists a function called entropy of the extensive parameters of a given system, defined for all equilibrium states and having the following property: the values assumed by the extensive parameters in the absence of an internal constraint
2.1 Equilibrium thermodynamics
2.
3.
|
5
are those that maximize the entropy over the manifold of constrained equilibrium states. The entropy of a composite system is additive over the constituent spatially separated subsystems. The entropy is continuous and differentiable and is a monotonically increasing function of the energy. This last property enables us to define thermodynamic temperature as T = (∂S/∂E)X where X stands for all extensive parameters except energy E. The entropy of any system vanishes at the zero of temperature T.
Equations of state, which relate intensive variables to extensive parameters, are a direct consequence of the fundamental relation via its derivatives. For example, T = T(E, X) represents such an equation of state. It is important to realize that knowledge of a single equation of state is insufficient for complete description of a system’s behavior. Only the complete knowledge of these equations of state, i.e., of all partial derivatives of fundamental relation (for example the above equation of state provides (∂S/∂E)X = T), is equivalent to knowledge of the fundamental relation. Therefore, in certain applications of equilibrium thermodynamics where the thermodynamic knowledge is not complete and only certain equation of state is known, thermodynamic potentials are not completely equivalent. The knowledge of the entropy as a function of all extensive variables yields complete knowledge of a system’s behavior in equilibrium, in contrast to an equation of state, and hence such a relation is referred to as a fundamental thermodynamic relation. We shall now introduce all the necessary concepts of equilibrium thermodynamics for intelligibility of this exposition. The equilibrium value of entropy is given by energy, volume and mass of the system, i.e., by a fundamental thermodynamic relation S = S(E, V, M) .
(2.1)
This dependence of entropy on E, V and M is assumed to be sufficiently regular and concave. The former property is required for the partial derivatives to be well defined while the latter for stability of the equilibrium state; see Section 2.6.5. Temperature, pressure and chemical potential (in J/kg) are then defined through the corresponding derivatives of entropy, 1 ∂S , =( ) T ∂E V,M
p ∂S =( ) T ∂V E,M
and
−
μ ∂S , =( ) T ∂M E,V
(2.2)
which means that differential of entropy can be written as dS = referred to as the Gibbs relation.
p μ 1 dE + dV − dM , T T T
(2.3)
6 | 2 Levels of description
Positivity of temperature then makes it possible to rewrite the fundamental thermodynamic relation as E = E(S, V, M) (2.4) by means of the implicit function theorem, and the two formulations (2.1) (entropic representation) and (2.4) (energetic representation) are thus equivalent. Differential of energy then becomes dE = T dS − p dV + μ dM .
(2.5)
Finally, the fundamental thermodynamic relation (2.1) can be interpreted geometrically as a surface (Gibbs manifold) in the (S, E, V, M) four dimensional space; Figure 2.1. Once the fundamental thermodynamic relation is known, equilibrium behavior of the system is fully specified. S
V
E
Fig. 2.1: Fundamental thermodynamic relation S(E, V, M) represents a surface in the (S, E, V, M) space. Coordinate M is not depicted in this figure for simplicity. This surface contains complete information about equilibrium behavior of the chosen thermodynamic system
2.1.2 One-homogeneity When two macroscopic systems in thermodynamic equilibrium with each other are put into contact so that they can be considered as one system, the total energy, volume and mass are typically the sums of the particular values for each system apart. This is so when surface energy and long range interactions are negligible. Since the systems were considered in equilibrium with each other, entropy does not grow when the systems are put together and it is also the sum of the particular entropies of each system when apart. Energy, volume, mass and entropy are then called extensive. On the other hand, quantities like temperature, pressure and chemical potential, which do not change when adding two systems in equilibrium together, are called intensive Consider two identical copies of the same system being put together. Energy, volume and mass are doubled as well as entropy. Therefore, entropy in the fundamental thermodynamic relation (2.1) is a one-homogeneous function of E, V, and M, S(αE, αV, αM) = αS(E, V, M)
∀α > 0 .
(2.6)
By differentiation with respect to α at α = 1, it follows that S(E, V, M) =
1 p μ E+ V− M, T T T
(2.7)
2.3 Second law of thermodynamics
|
7
and by comparison with Equation (2.3) we obtain the Gibbs–Duhem relation p μ 1 +Vd −Md . (2.8) T T T The Gibbs–Duhem relation is a consequence of extensivity of the equilibrium state variables. The one-homogeneity of entropy also has another interesting consequence. Choosing the scaling factor as α = V −1 , it follows that 0 = Ed
S(E, V, M) = V ⋅ S (
E M , ) , V V
(2.9)
which means that the functional dependence of entropy on E, V and M is effectively a function of two variables instead of three. Further, the Gibbs-Duhem relation reveals that not all intensive parameters are independent. This property is manifested for instance in the fundamental thermodynamic relation of ideal gas in Section 2.7.9.
2.2 First law of thermodynamics The first law of thermodynamics, conservation of energy, states that energy of an isolated system does not change in time. It can be regarded as a consequence of the assumption that evolution of an isolated system of particles is given by the Hamiltonian canonical equations, where the antisymmetry of the canonical Poisson bracket implies energy conservation; see Section 3.2. It is often useful to distinguish between energy transfers that change entropy (heat Q) and those that do not change it (work W). Change of energy of an open system can then be expressed as absorption of heat and work, dE = ⏟⏟⏟⏟⏟⏟⏟ T dS −p dV + μ dN . ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ =Q
(2.10)
= −W
The work is considered positive if energy is extracted from the system.
2.3 Second law of thermodynamics The second law of thermodynamics was established based on real-world experience. For example the observation that heat flows from systems with higher temperature¹ to systems with lower temperature can be rewritten as dE1 + dE2 = 0 1 1 1 1 dE1 + dE2 = ( − ) dE1 . 0 ≤ dS1 + dS2 = T1 T2 T1 T2 1 Temperature is defined as inverse of the derivative of entropy with respect to energy.
(2.11a) (2.11b)
8 | 2 Levels of description Indeed, when temperature of system 2 is higher than temperature of system 1, T2 ≥ T1 , and heat goes from the hotter body to the colder, i.e., dE1 ≥ 0, entropy of an isolated system grows until the equilibrium is reached. The composed system 1+2 is considered isolated. In the particular case of two thermally connected bodies, the equilibrium is characterized by equality of temperatures of the two bodies. Such a system of two bodies with constant volume and composition in thermal contact is perhaps the simplest nonequilibrium system. The state variables of the system are (E1 , E2 ). The fundamental thermodynamic relation, which addresses the equilibrium state of the system, then gives the equilibrium value of entropy as a function of total energy, E = E1 + E2 . Having fundamental thermodynamic relations of the two bodies, S1 = S1 (E1 ) and S2 = S2 (E2 ) , (2.12) total entropy of the system in a nonequilibrium state is given by (neglecting the contact surface of the bodies) (2.13) Stot (E1 , E2 ) = S1 (E1 ) + S2 (E2 ) . The fundamental thermodynamic relation of the composed system can be obtained by maximization of the total entropy, ∂ (−Stot (E1 , E2 ) + ∂E1 ∂ (−Stot (E1 , E2 ) + ∂E2
1 (E1 + E2 )) = 0 , T 1 (E1 + E2 )) = 0 , T
(2.14a) (2.14b)
where T plays the role of a Lagrange multiplier. These equations can be rewritten as 1 ∂S1 1 1 ∂S2 = = = = . T1 ∂E1 T ∂E2 T2
(2.15)
Solution to these equations is the tuple (E1 (T(E)), E2 (T(E))), and the equilibrium fundamental thermodynamic relation of the composed system becomes Stot,eq (E) = S1 (E1 (T(E))) + S2 (E2 (T(E))) .
(2.16)
In summary, when starting with two systems that are each in equilibrium with themselves only (and have their own fundamental thermodynamic relations), the systems evolve after putting them into contact towards the state of maximum entropy (of the whole system composed of the two subsystems). The total energy (of both subsystems together) then plays the role of state variable for the composed system. The equilibrium fundamental thermodynamic relation of the composed system can be found by maximization of the total entropy keeping total energy, volume and composition constant. “In this house we obey the laws of thermodynamics!” (Homer Simpson)
2.4 Levels of description | 9
2.4 Levels of description 2.4.1 Nonequilibrium fundamental thermodynamic relation Consider an isolated system. When the system is out of thermodynamic equilibrium, its behavior can be described only when some more detailed state variables than just total energy, volume and mass are used. For example, the state variables can be the fields of density, momentum density and energy density as in classical fluid mechanics (Navier–Stokes–Fourier equations). Let us denote the state variables of the system by x (this means that a particular state of the system on the chosen level of description is fully captured by values of the considered state variables). Entropy, energy and mass are then functions of all state variables of the system, S(x), E(x) and M(x) .
(2.17)
M stands for total mass of the system. Assuming in particular that the field of energy density is among the state variables, i.e., E = ∫ de(r), temperature is defined as the derivative 1 def δS = . T δe
(2.18)
This is the general definition of temperature. Note that it does not need to correspond to the values measured by thermometers working in a nonequilibrium regime. Each thermometer in fact measures a value that is related to the measured system by the interaction of the thermometer and the system, and therefore different thermometers do not need to measure the same temperatures out of equilibrium. This makes the theoretical definition of temperature (2.18) advantageous. The second law of thermodynamics states that the system will evolve towards the state where the entropy of the system is maximal possible. The equilibrium value of entropy can be thus obtained by maximizing entropy keeping only E, V and M constant. Such a maximization gives the equilibrium value of x(E, V, M) and consequently the equilibrium fundamental thermodynamic relation S(x(E, V, M)) .
(2.19)
The approach of x towards the equilibrium value is demonstrated in Figure 2.2. S
X E
Fig. 2.2: Fundamental thermodynamic relation S(x, E, V, M) of a system out of thermodynamic equilibrium. The extra variable x relaxes to the equilibrium value, which is given by maximum of entropy at given energy level (the dotted frame). Variables V and M are not depicted for simplicity
10 | 2 Levels of description
2.4.2 Thermodynamic potential The approach of a thermodynamic system to the thermodynamic equilibrium is driven by maximization of entropy. The maximization, however, proceeds at constant energy, volume and mass for closed systems. Therefore, the (constrained) maximum is not characterized by zero gradient of entropy, but rather by zero gradient of the thermodynamic potential Φ(x) = −S(x) +
1 p0 μ0 E(x) + V(x) − M(x) , T0 T0 T0
(2.20)
where T0 , p0 and μ0 are the Lagrange multipliers used in the maximization procedure, which can be interpreted as the equilibrium temperature, pressure and chemical potential (in J/kg). This can be appreciated from the fact that entropy maximization subject to constraints (E, V, M) is a double Legendre transformation and hence the Lagrange multipliers are the respective derivatives of entropy evaluated at equilibrium; see Appendix A.3. The isolated system evolves so that the thermodynamic potential Φ reaches its minimum. The thermodynamic potential drives the isolated system into equilibrium xeq , which is characterized by ∂Φ(x) =0. ∂x x=x
(2.21)
eq
2.5 Legendre transformation 2.5.1 Helmholtz free energy Once we have a fundamental thermodynamic relation (2.1) for a physical system, equilibrium behavior of the system is fully specified. However, there is no direct way to measure entropy or absolute value of energy. Therefore, it is usually more practical to express behavior of the system by means of temperature, since temperature difference is what matters when the system is in contact with an external thermometer due to the tendency for equilibration as in Section 2.3. Temperature (at least in equilibrium) is measurable. Temperature is defined as the derivative of energy with respect to entropy, T=(
∂E . ) ∂S V,M
(2.22)
This relation can be seen as an equation for entropy, and solution to the equation is then a function S(T, V, N). In order to guarantee that this equation has only one solution, let us assume that energy is a convex function of S, V and N. Nonconvexity could generate phase transitions and instability, so we will consider only the convex
2.5 Legendre transformation
|
11
case for now. From convexity it then follows that (considering number of moles constant) ∂2 E ∂2 E >0, >0 2 ∂S ∂V 2 ∂2 E ∂2 E ∂2 E ∂2 E − >0, ∂S2 ∂V 2 ∂S∂V ∂V∂S
and
(2.23a) (2.23b)
and the implicit function theorem (IFT) with the first inequality above then implies that equation (2.22) has a unique solution locally. Thus for convex energy we can always construct the function S(T, V, N). We could now simply plug this dependence into the fundamental thermodynamic relation and obtain a function E(T, V, M). However, such a function would obtain less information than the original fundamental thermodynamic relation E(S, V, M). In̄ deed, any energy of the form E(S, V, M) = E(S − S,̄ V, M) would generate the same ̄ dependence on T, i.e., E(T, V, M) = E(T, V, M). Therefore the dependence E(T, V, M) corresponds to many different relations E(S, V, M). Relation E(S(T, V, M), V, M) contains less information than relation E(S, V, M). The solution is to construct a Legendre transformation that naturally depends on T, V and M as Legendre transformation is reversible (and hence one-to-one transformation), F(T, V, M) = E(S(T, V, M), V, M) − TS(T, V, M) , (2.24) which is the Helmholtz free energy. Derivatives of the free energy then become, via definitions (2.2), ∂F ∂S ∂E ∂S =( ) − S(T, V, M) − T ( ) = −S(T, V, M) ( ) ) ∂T V,M ∂S V,M ∂T V,M ∂T V,M ∂F ∂S ∂E ∂E ∂S =( ) +( −T( = −p , ( ( ) ) ) ) ∂V T,M ∂S V,M ∂V T,M ∂V S(T,V,M),M ∂V T,M (
(2.25a) (2.25b)
which can be summarized as dF = −S dT − p dV + μ dM .
(2.25c)
Helmholtz free energy naturally depends on T, V and M. The inverse transformation, S = −(
∂F ⇒ T(S, V, M) ) ∂T V,M
(2.26a)
and E(S, V, M) = F(T(S, V, M)) + T(S, V, M) ⋅ S ,
(2.26b)
then leads back to the original function E(S, V, M). Therefore, Legendre transformation does not lose any information. The content of relation E(S, V, M) is the same as the content of relation F(T, V, M).
12 | 2 Levels of description
EXERCISE: Legendre transformations Find Legendre transformations of – E(S) = αS2 – E(S) = exp(S) – Φ(x + δx), δx being a constant. Hint: You can use the Legendre transformation of Φ itself.
The second derivative of free energy with respect to temperature reads (
∂2 F ∂S ∂T ) = −( ) = − (( ) ) 2 ∂T V,M ∂S V,M ∂T V,M
−1
= −(
∂2 E ) 0 ∂y x
∂X ∂Y ∂X 2 ) ( ) −( ) >0. ∂x y ∂y x ∂y x
(2.58)
Assume now that the body and the medium are in equilibrium X = 0 = Y. Then let the body be pushed out of the equilibrium with the medium by action of some external force. With the definitions of x, y this means that quantity x is perturbed by ∆x and subsequently kept constant while the body remains initially in equilibrium due to the instantaneous change, i.e., y is initially unaffected. The abrupt change in the thermodynamic force X due to the perturbation of x is then (∆X)y = (
∂X ) ∆x . ∂x y
(2.59)
The perturbation of x, however, subsequently forces the body out of its own equilibrium, i.e., also makes the thermodynamic force Y nonzero, (∆Y)y = (
∂Y ) ∆x ≠ 0 . ∂x y
(2.60)
in its temperature or its condensation (pressure, concentration, number of molecules in the unit of volume) in its totality or only in some one of its parts can undergo only those interior modifications which, if they occur alone, would produce a change of temperature, or of condensation, of a sign contrary to that resulting from the exterior force.
20 | 2 Levels of description
Because the force Y became nonzero, variable y will relax to the equilibrium given by Y = 0 on a much faster scale than relaxation of x due to systems scales, i.e., while keeping x constant. What value will the force X attain after the relaxation? Before the perturbation, force Y was zero as well as after the relaxation of y. Therefore, the change of X between the final state after y has relaxed and the state before the perturbation will be ∂X (∆X)Y=0 = ( (2.61) ) ∆x . ∂x Y The derivative of X at constant Y can be expressed as ∂(X, Y) ∂X ) = = ( ∂x Y ∂(x, Y)
=(
∂(X,Y) ∂(x,y) ∂(x,Y) ∂(x,y) ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ >0 2 ( ∂X ∂y ) x
=
∂Y ∂X ∂Y ( ∂X ∂x ) y ( ∂y ) − ( ∂y ) ( ∂x ) y
∂X ∂X ( ) >0, ∂x y ∂x Y
(2.63)
|(∆X)y | > |(∆X)Y=0 | .
(2.64)
( which means that
This last inequality can be interpreted as the Braun–Le Chatelier principle: Let the body and the medium be in equilibrium. Equilibrium of the body and the medium is then abruptly disturbed and variable x is perturbed yielding X ≠ 0. The smaller body immediately becomes out of equilibrium as well, Y ≠ 0, and responds by finding a new equilibrium, Y = 0, on a fast timescale, hence we approximate ∆x to be constant during this relaxation of the body. Consequently, force X will also change, and the change will be such that the force will be lower than before the relaxation of variable y. The Braun–Le Chatelier principle is the stability implications of concavity of entropy. Let us demonstrate the Braun–Le Chatelier principle on a few examples. Using Equation (2.46b), it is advantageous to choose the variable x as S, V or M, i.e., as entropy, volume or mass of the body. Consider first the choice x = S. The corresponding force becomes X = (T − T0 )/T0 . The Braun–Le Chatelier principle, Equation (2.64), then states that |(∆T)y | > |(∆T)Y=0 | , (2.65) which means that relaxation of the unspecified internal variable y of the body reduces the temperature difference caused by the perturbation of energy of the body. In other words, adding some amount of heat (recall the Definition (2.10)) to the body leads to internal processes inside the body that reduce the temperature difference between
2.7 What is entropy?
| 21
the body and the medium. For example, the body can change its volume (typically it grows) so that its temperature is reduced. We can also choose x to be the volume of the body, x = V. The corresponding force is then X = |p0 − p|/T0 , and Equation (2.64) becomes |(∆p)y | > |(∆p)Y=0 | .
(2.66)
Change of the volume of the body leads to internal processes inside the body that reduce the pressure difference. For example, if the body is compressed and pressure of the body is raised, it can release some amount of heat so that the pressure is reduced to some extent. Finally, we can choose x = M, which leads to the thermodynamic force X = (μ − μ 0 )/T0 . The Braun–Le Chatelier principle then gives |(∆μ)y | > |(∆μ)Y=0 | ,
(2.67)
which means that the body will undergo internal process that reduce the chemical potential difference. For example, adding some amount of matter to the body will raise the chemical potential of the body. From Equation (2.5), it follows that (
∂p ∂μ = −( . ) ) ∂V S,M ∂M S,V
(2.68)
Because pressure typically grows with number of particles, chemical potential will reduce when expanding the volume (with adiabatic walls – constant entropy). Therefore, it can be expected that the body expands after the addition of matter. Choosing x = S, we can add some heat to the system (raising the entropy) and temperature of the body will be raised. The Braun–Le Chatelier principle then tells us that a chemical reaction can be triggered in the body such that the temperature is reduced again, i.e., endothermic reactions can occur. For example, consider a saturated solution of salt in water (equilibrium between the solution and crystals of salt), the dissolution of which is an endothermic process. Heating up the solution will increase the solubility and more salt will be dissolved, which results in consumption of some amount of heat. The body resists the initial heating up.
2.7 What is entropy? Entropy is an interlevel concept. It addresses the relation between two levels of description. One of the levels (level [A]) is more microscopic (involving more details) and the other (level [B]) is more macroscopic (involving fewer details). The entropy on level (A) is a potential that drives the preparation process for the applicability of level (B). After the preparation is completed, the entropy on level (A) becomes a potential on level (B) (called an entropy on the level [B]). We shall now discuss a few examples.
22 | 2 Levels of description
Let level (A) be the microscopic level of the particle mechanics with the position vectors (r1 , . . . , r N ) and the momenta (p1 , . . . , pN ) serving as state variables. In the preparation process for level (B) a pattern in the particle trajectories emerges. The quantities characterizing the pattern are then the state variables used on level (B). In order to facilitate the pattern recognition process, it is useful to make the Liouville lift of the particle mechanics. In such lift (Section 3.4) the state variables (r1 , . . . , r N , p1 , . . . , pN ) are replaced by the distribution function f N (r1 , . . . , r N , p1 , . . . , pN ) and the Hamilton equations governing the time evolution of (r1 , . . . , rN , p1 , . . . , pn ) turn into the Liouville equation. It is much more natural to characterize the patterns that are emerging in solutions of the governing equations of classical mechanics in terms of the distribution function than in terms of the coordinates and the momenta. In addition the entropy, which makes the emergence of the pattern manifestly visible, becomes expressed in terms of the distribution function. We recall now the arguments relating the entropy, which arise in the passage from particle mechanics to classical equilibrium thermodynamics, to the measure of information. Following Gibbs, the pattern in this case is the ergodic-type distribution of the particle trajectories. The arguments are easier to explain in the finite dimensional space (the space of distribution functions is infinite dimensional), we therefore begin with the quantum mechanics.
2.7.1 Uncertainty and information entropy In quantum mechanics, see e.g., [10], it is usual that a system has stationary states (eigenstates of the Hamiltonian), and the wave function of the system is a composition of the stationary states. Therefore, each state has a probability that the system is in that particular state. Instead of quantum systems, we could think about a dice, each face of which has a given probability. Let us denote by p i probability of state i, i = 1, . . . , n. Each of the discrete states of the system has a particular probability p i and the sum of all probabilities is normalized to one, n
∑ pi = 1 .
(2.69)
i=1
If all states except for, for instance, the first one had zero probability while the state 1 probability p1 = 1, the system would surely be in state 1. There would be no uncertainty about in which state the system is. This is, however, not a usual situation. Consider for example a standard six faced dice. The probability of each face is equal to 1/6, and there is some uncertainty about which face of the dice will appear. There can be no or some uncertainty about the concrete state of the system. How to define the uncertainty more precisely? Shannon [11] introduced uncertainty S(p1 , . . . , p n ) by the following axioms: 1. S ≥ 0. 2. S is a continuous function of the probabilities.
2.7 What is entropy?
|
23
def
Introducing function A(n) = S(1/n, . . . , 1/n), function A(n) is a strictly monotonously increasing function of n, which means that a system with more possible equally probable states shows more uncertainty than a system with less equally probable states. Moreover, define A(1) = 0, which means that if there is only one state possible, there is no uncertainty. 4. Composition rule: Uncertainty does not depend on regrouping of the states. For example, consider three states with probabilities p1 = 1/2, p2 = 1/3 and p3 = 1/6. Then state 1 will be denoted as group I while states 2 and 3 as group II. The probability that the system is in group I is 1/2 as well as in group II because 1/3 + 1/6 = 1/2. The uncertainty can then be composed from the uncertainty of whether the system is in group I or group II and the uncertainties for choosing the particular state of each group. More precisely, 3.
1 1 1 1 1/3 1/6 1 1 1 , ). S( , , ) = S( , ) + S(1) + S( 2 3 6 2 2 2 2 ⏟⏟1/2 ⏟⏟⏟⏟⏟ ⏟⏟1/2 ⏟⏟⏟⏟⏟
(2.70)
= 2/3 = 1/3
The first term on the right hand side expresses the uncertainty of choosing a group. The other terms express the uncertainty of choosing one particular state of a group provided the group is chosen (the prefactor is the probability of the group). The probability of choosing a particular state within a group is then the conditional probability of the state provided the corresponding group is chosen, i.e., probability of the state divided by probability of the group. The composition rule expresses that the formula for uncertainty should not depend on the subjective choice of a division of the states into groups. These are Shannon’s axioms defining uncertainty S(p1 , . . . , p n ). Do the axioms determine a particular functional dependence of S on the probabilities? Yes, they do. But let us start with a simple system with n states each of which has the same probability, p i = 1/n ∀i, and let n be a product of two integers, n = a ⋅ B. The set of n states can then be seen as B groups, each of which has a states. Each group then has probability a/n = 1/B. The composition rule then gives that B 1 1 1 1 1 1 1 S( ,..., ) = S( ,..., )+∑ S( ,..., ) , n n B B B a a i=I
(2.71)
which can be rewritten as A(a ⋅ B) = A(B) + A(a)
∀a, B ∈ ℕ .
(2.72)
This is a functional equation for an unknown function A(n) of integers. For instance, A(n) = c ln n ,
(2.73)
with c > 0 being a positive constant, fulfills that functional equation. Moreover, Erdös [12] showed that this is the only monotonous solution. The solution is unique.
24 | 2 Levels of description
Let us now choose a different simple system with n equally probable states, and divide the states into groups I, . . . , B each of which contains a I , . . . , a B states. Therefore, ∑Bi=I a i = n. The composition rule then gives B ai 1 1 aI aB 1 1 )+∑ S( ,..., ) , S( ,..., ) = S( ,..., n n n n n a a i i i=I
(2.74)
which means that S(
B ai aI aB ,..., ) = A(n) − ∑ A(a i ) n n n i=I B
= c ln n − ∑ c i=I
B ai ai ai ln a i = −c ∑ ln . n n n i=I
(2.75)
In other words, B
S(p1 , . . . , p B ) = −c ∑ p i ln p i
(2.76)
i=I
for all p i rational numbers. From the assumption of continuity, formula (2.76) is valid for all p i real numbers satisfying ∑i p i = 1. This is the famous Shannon entropy, which is a unique formula expressing the uncertainty (defined by Shannon’s axioms). Shannon’s entropy is thus the unique way of measuring our uncertainty about which state the system is in. Note that the constant c has been left undetermined albeit positive. The choice of the constant does not alter the meaning of uncertainty. But entropy has already been introduced in equilibrium thermodynamics, recall for example that heat is Q = T dS. Therefore, the constant must have dimension J/K. What is the numerical value of the constant? It was, in fact, first determined by Max Planck [13] by comparison to experimental data on black body radiation, and the constant is called the Boltzmann constant k B ≈ 1.38 ⋅ 10−23 J/K. Planck used this in his derivation experimental data on behavior of black body radiation at different temperatures, and the calculation thus depends on the temperature scale chosen. From the relation Q = T dS, we can see that change of heat by 1 J corresponds to the product T and dS, and if we decide to multiply temperature by a factor (rescale the units of Kelvin), entropy would have to be divided by that factor (rescaling the constant prefactor of entropy). The choice of 1 K as the fraction 1/273.15 of the temperature of the triple point of water then determines the value of the Boltzmann constant. The numerical value of the Boltzmann constant is thus a result of the standard choice of temperature scale (Kelvin or °C). In summary, we usually do not know which state a system is in, which means that we experience some uncertainty about the system. Shannon entropy is the unique measure of uncertainty (it is not a unique measure of entropy in theory of information; rather Shannon’s entropy is the only functional satisfying the presented rather natural
2.7 What is entropy?
|
25
axioms proposed by Shannon), and it is given by the formula S(Shannon) (p1 , . . . , p n ) = −k B ∑ p i ln p i ,
(2.77)
i
where p i is the probability of state i. This formula is uniquely determined based on Shannon’s axioms defining the notion of uncertainty³. The positive constant in front of the formula for uncertainty is chosen to be the Boltzmann constant, which makes uncertainty equivalent with entropy introduced in thermodynamics. Uncertainty and entropy will be treated as equals hereafter in this book. Another reason for the equivalence between uncertainty and entropy is that the Liouville entropy (2.112), which is commonly accepted as the most detailed entropy in classical physics, is the continuum counterpart of the Shannon entropy as shown in Section 2.7.6.
2.7.2 Principle of maximum entropy 2.7.2.1 From a level to equilibrium Entropy was introduced in the preceding section as the measure of our uncertainty about which state a system will be found in. Maximization of entropy can be thus seen as maximization of our uncertainty. The second law of thermodynamics can then be rephrased as a tendency of any isolated system to maximize our uncertainty about which state the system can be found in. Consider now an isolated system described by state variables x. How can we estimate the values of the variables provided we know only energy, volume and mass of the system? Of course, if we know only energy, volume and mass of the system, it is impossible to determine the value of x precisely. But what is the best guess? When talking about a ‘best’ guess, we should first specify what ‘best’ means. It is reasonable to use all the knowledge we have about the system, i.e., E, V and M. On the other hand, we should not use anything else, since we assumed that E, V and M represent everything we know about the system. In other words, the estimate of the variables x should be such that no other information is used than the knowledge of E, V and N. Our uncertainty should be thus maximized at the constraints given by the particular values of E, V and M. Because uncertainty is measured by entropy, maximization of uncertainty can be formulated as the following principle. Principle of entropy maximization (MaxEnt): If only E, V and M of an isolated system are known, a variable x can be estimated as the value at which S is maximal for given E, V and M. The estimated value is given as the solution to equation ∂ p0 μ0 ∂Φ 1 E(x) + V(x) − M(x)) ≡ (−S(x) + =0. ∂x T0 T0 T0 ∂x
(2.78)
3 Note that the axiom of composition rule could be replaced by a different rule, which then leads to nonadditive entropies like Tsallis or Rényi [14].
26 | 2 Levels of description
The solution to this equation is the stationary point of thermodynamic potential Φ(x). After plugging the solution to this equation x(E, V, M) back into the formula for entropy S(x), we obtain the fundamental thermodynamic relation S(E, V, M). The MaxEnt estimate of the unknown variable can be seen as the most objective in the sense that all subjective inputs (anything except what we declare to know) are reduced as much as possible. Any another estimate would necessarily be less objective than the MaxEnt estimate, since MaxEnt maximizes our uncertainty, which is determined in a unique way. 2.7.2.2 From a level to another level MaxEnt can be used also in the case of two arbitrary levels of description analogously. Consider a system described by variables x, the higher more detailed (microscopic) level of description. Suppose that our knowledge is represented by some less detailed state variables y(x), the lower level, and the goal is to estimate the values of x based on that knowledge. The most objective way will be again the maximization of entropy of the system dependent on variables x, ↑S(x), ∂ (−↑S(x) + ⟨y∗ , y(x)⟩) = 0 . ∂x
(2.79)
The Lagrange multipliers y∗ will be referred to as the conjugate variables to state variables y. Scalar product ⟨, ⟩ is the usual scalar product of vectors. In the case of fields, it is the L2 scalar product, integration over space of phase space. After solving Equation (2.79) we obtain a function x(y∗ ). Equation (2.79) can be interpreted as a generalized Legendre transformation from entropy S(x) to a new function ↓ ∗
S (y∗ ) = −S(x(y∗ )) + ⟨y∗ , y(x(y∗ ))⟩ .
(2.80)
The reason for the up and down arrows is that ↑S is the entropy on the higher (more detailed) level of description, characterized by variables x, while ↓S∗ is the conjugate entropy on the lower (less detailed) level of description. Note that some information is typically lost in this Legendre transformation because the mapping y(x) is usually not one-to-one; it is rather a projection. Entropy (nonconjugate) on the lower level is then given by Legendre transformation ∂ (−↓S∗ (y∗ ) + ⟨y, y∗ ⟩) = 0 , (2.81) ∂y∗ which has solution y∗ (y), and by plugging this solution back it leads to the formula for entropy on the lower level of description ↓
S(y) = −↓S∗ (y∗ (y)) + ⟨y∗ (y), y⟩ .
Note that from this relation it follows that ∂y∗ ∂y∗l ∂↓S ∂↓S∗ = − ∗ + l y l + y∗k = y∗k , yk ∂y l y∗ =y∗ (y) ∂y k ∂y k y∗ =y∗ (y)
(2.82)
(2.83)
2.7 What is entropy? |
27
where relation (2.81) was used, and hence we may clarify the statement that y∗ indeed are conjugate variables to y with respect to ↓S. This sequence of two Legendre transformations is equivalent to direct maximization of ↑S with constraints y(x) and subsequent direct substitution into ↑S. Indeed, the lower entropy is given by ↓
S(y) = −↓S∗ (y∗ (y)) + y∗ (y) ⋅ y = ↑S(x(y∗ (y))) − y∗ (y) ⋅ y + y∗ (y) ⋅ y = ↑S(x(y)) ;
(2.84)
see Section A.3 for more details. The maximization leads directly to ↓S while the two Legendre transformations first project ↑S to ↓S∗ and, subsequently, convert ↓S∗ to ↓S. Both ways, however, lead to the same result. Let us now illustrate MaxEnt on a few examples. Note also that MaxEnt (two Legendre transformation) provides a mapping from the lower less detailed level to the higher level. It is not a simple inverse of the projection mapping from the higher to the lower level but it is the least biased estimate based on the knowledge available (↓S, ↑S); see Fig 2.4. higher level
o T.
L. f
proj.
m
fro
lower level
Fig. 2.4: Overview of the state variables involved in the MaxEnt procedure including entropies. Note in particular that it provides a mapping from the lower to the upper level state variables, x(y), not available via ‘inverse mapping’ considerations of the projection y(x)
2.7.2.3 Relation to the second law The second law of thermodynamics states that entropy of an isolated system grows until the system reaches equilibrium. From the perspective of observers on different levels of description, the growth of entropy becomes the tendency of the system to enable lower (less detailed) observers to describe the system well. Higher observers (with the knowledge of a lot of details) might be required to describe the behavior of the system initially. But after some time the lower observers will also start to recognize the expected behavior of the system by means accessible to them. Lower level descriptions thus become gradually validated, which is the multiscale meaning of the second law of thermodynamics.
2.7.3 Microcanonical distribution Entropy of the isolated system with states 1, . . . , Ω is given by formula (2.77). Assume now that we have no information about the system, i.e., we only know that Ω
∑ pi = 1 . i=1
(2.85)
28 | 2 Levels of description
Maximization of the entropy subject to the constraint (2.85) can be achieved by the method of Lagrange multipliers, ∂ (−S(Shannon) + ν∗ ⋅ ∑ p j ) = 0 , ∂p i j
(2.86)
ν∗ being a number. This equation can be rewritten as k B (ln p i + 1) + ν∗ = 0
∀i = 1, . . . , Ω ,
(2.87)
which means that all probabilities are the same and equal to p i = exp (−1 −
ν∗ ) kB
∀i ,
(2.88)
and thus
1 . Ω Shannon entropy then becomes the microcanonical entropy pi =
S(microcanonical) (Ω) = S(Shannon) (p(Ω)) 1 1 = −k B ∑ ln = k B ln Ω . Ω Ω i
(2.89)
(2.90)
When nothing is known about a system, the most objective estimate of the probability distribution is that all probabilities are the same. The entropy is then the microcanonical entropy. EXERCISE: A fair dice Consider that you have a six faced dice and that you have no information about the dice. What is the estimate of the probabilities of the faces of the dice?
2.7.4 Canonical distribution There is some energy assigned to each state of the system, E i . Assume now that we know the value of energy of the system, E = ∑ Ei pi .
(2.91)
i
Maximization of Shannon entropy subject to constraint (2.91) can be done directly by means of Lagrange multipliers, as in the preceding example, or by means of the two Legendre transformations. Let us follow the latter, since it will become useful later. At first, the probabilities are expressed as functions of E∗ and ν∗ by solving equations ∂ (−S(Shannon) + ν∗ ⋅ ∑ p j + E∗ ⋅ ∑ E j p j ) = 0 ∀i , ∂p i j j
(2.92)
2.7 What is entropy?
| 29
which gives p i (ν∗ , E∗) = exp (−1 −
ν∗ E∗ ) ⋅ exp (− E i ) kB kB
∀i = 1, . . . , Ω .
(2.93)
The probabilities follow the Boltzmann distribution. The conjugate lower entropy then becomes ↓ ∗
S (ν∗ , E∗ ) = −S(Shannon) (p(ν∗ , E∗ )) + ν∗ ⋅ ∑ p j (ν∗ , E∗ ) + E∗ ⋅ ∑ E j p j (ν∗ , E∗ ) j
= −k B ∑ e
∗
−1− νk
B
j
∗
e
− Ek E i B
.
(2.94)
i
The subsequent Legendre transformation from ν∗ and E∗ to ν and E reads: ∂ (−↓S∗ + 1 ⋅ ν∗ + EE∗ ) = 0 , ∂ν∗ ∂ (−↓S∗ + 1 ⋅ ν∗ + EE∗ ) = 0 , ∂E∗
(2.95a) (2.95b)
which means that ν = ∑e
∗
−1− νk
B
∗
e
− Ek E i
(2.96a)
B
i
E = ∑ Ei e
∗
−1− νk
B
∗
e
− Ek E i B
.
(2.96b)
i
Normalization condition ∑j p j = 1 can be used to specify ν = 1 from relation (2.96a) for ν(ν∗ , E∗ ) and probabilities (2.93). Therefore we can further rewrite the relations between direct and conjugate variables to ∗
e
1 Z(E∗ ) k B ∂Z E=− Z ∂E∗
−1− νk
B
=
for Z(E∗ , V) = ∑ e
(2.97a) (2.97b)
∗
− Ek E i
(2.97c)
B
i
as the partition function. Note that the dependence on volume is encoded into the energy levels E i . The distribution function (2.93) then becomes p i (E∗ (E)) =
1 E∗ (E) Ei ) exp (− Z(E∗ (E)) kB
∀i = 1, . . . , Ω .
(2.97d)
These equations cannot be solved analytically in general. For instance, equation (2.97b) is an equation for E∗ , which can be solved analytically only in special cases.
30 | 2 Levels of description Assume, however, that the solution E∗ (E) has been obtained. The lower entropy is then given by ↓ S(E) = −↓S∗ (E∗ (E)) + E ⋅ E∗ (E) , (2.98) and derivative of this entropy with respect to energy (inverse temperature) is T −1 =
∂↓S ∂E∗ ∂↓S∗ ∂E∗ =− ∗ + E∗ (E) + E = E∗ . ∂E ∂E ∂E ∂E
(2.99)
The conjugate energy E∗ is thus the inverse temperature. This relation follows directly from the MaxEnt principle as shown in Equation (2.83) Assuming that the number of states with positive energy is infinite, boundedness of energy in formula (2.97b) then requires the temperature be positive. Positivity of temperature is thus a consequence of the possibility of infinitely many states with positive energy. EXERCISE: An unfair dice Consider a six faced dice with average number equal to 4. What is the estimated probability distribution? And what if the average is 3.5? Hint: You will have to solve a nonlinear algebraic equation numerically.
EXERCISE: Harmonic oscillator Assume that E n = ℏω(n + 1/2) ∀n = 0, . . . , ∞, where ℏ = h/2π is the reduced Planck constant and ω is a given frequency. Suppose, moreover, that an average energy of the system is known. What is the estimated probability distribution? What is the entropy ↓S(E)? On the way, you can recover 1 – Z(E ∗ ) = ∗ 2 sinh ( ℏω 2 E ) –
↓ ∗
S (ν ∗ , E ∗ ) = −kB e −1−ν
–
ν ∗ = kB (ln Z − 1)
–
E∗ =
–
↓
∗ /k
B
Z(E ∗ )
2E +1 kB ln ( ℏω ) 2E ℏω ℏω − 1
S(E) = E
2E +1 kB ( ℏω ) − kB ln ( ℏω 2E − 1 ( ℏω
E ℏω E ℏω
− 12 )
2
).
Bearing in mind that E ∗ = T −1 , Helmholtz free energy is F(T) = −kB T ln Z(T −1 ) = kB T ln (2 sinh (
ℏω )) , kB T
which becomes in the high temperature limit F(T) ≈ kB T ln((2ℏω)/(kB T )). This free energy is also in tight relation to free energy of solids at high enough temperatures because solids can be thought of as a collection of harmonic oscillators. Verify that lim(E ∗ )− 1=T→0 S(E(E ∗ )) = 0 as well as limE→1/2ℏω S(E) = 0.
2.7 What is entropy?
| 31
If the knowledge about the system is represented by energy of the system, the MaxEnt estimate of the probability distribution is the Boltzmann distribution, where probability of each state is proportional to the Boltzmann factor exp(−E i /k B T), with E i being energy of the state.
2.7.5 Grand canonical distribution Assume now that we know energy E and number of particles N of the system. The states of the system can then be represented by the infinite table p Ni , each entry of which expresses the probability that there are N particles in the state i (with energy i) in the system. Note that the number of accessible states is different for different numbers of particles. Shannon entropy can then be again maximized with respect to those constraints, and the maximization can be seen as a twofold Legendre transformation. The first transformation reads ∂ ∂p Ni
∞
(−S(Shannon) + ν∗ ⋅ ( ∑ ∑ p Nj ) N =0
∞
j
∞
+E∗ ⋅ ( ∑ ∑ E Nj p Nj ) + N ∗ ⋅ ( ∑ N ∑ p Nj )) = 0 ∀p Ni , N =0 j
N =0
(2.100)
j
which means that p Ni = exp (−1 −
ν∗ E∗ N∗ ) ⋅ exp (− E Ni ) ⋅ exp (− N) . kB kB kB
(2.101)
Using the normalization ∑N ∑i p Ni = 1, the probability can be rewritten as p Ni = with
N∗ E∗ 1 exp (− E Ni ) ⋅ exp (− N) Ω kB kB ∞
Ω(E∗ , V, N ∗ ) = ∑ ∑ exp (− N=0 i
N∗ E∗ N E i ) ⋅ exp (− N) kB kB
(2.102)
(2.103)
being the grand canonical partition sum. Probability distribution (2.102) is called grand canonical. The lower conjugate entropy is then given by plugging probabilities (2.102) into the differentiated function in Equation (2.100), ∞
↓ ∗
S (E∗ , V, N ∗ ) = −k B ∑ ∑ N=0 i
1 − Ek ∗ E Ni − Nk ∗ N e B e B . Ω
(2.104)
The lower entropy ↓S(E, V, N) is then obtained by Legendre transformation from E∗ and N ∗ to E and N analogously as in the case of the canonical distribution, E=(
∂↓S∗ ) ∂E∗ N ∗
and
N=(
∂↓S∗ ) . ∂N ∗ E∗
(2.105)
32 | 2 Levels of description The solution to these equations E∗ (E, N) and N ∗ (E, N) can then be plugged into −↓S∗ + E∗ E + N ∗ N, leading to the fundamental thermodynamic relation ↓S(E, V, N). The inverse Legendre transformation (from E and N to E∗ and N ∗ ) reads: E∗ = (
∂↓S 1 ) = ∂E N T
and
N∗ = (
∂↓S μ ) =− . ∂N E T
(2.106)
The conjugate number of particles N ∗ thus represents chemical potential. When all the particles are indistinguishable, for example one photon cannot be distinguished from another photon, it should be borne in mind that the summation over all states is meant as over all distinguishable states. States of the system that are converted to each other just by permutation of indistinguishable particles are identical. Assume that all particles of the system are indistinguishable and that they do not interact in the sense that there is a sequence of states i = 1, . . . , ∞ and each particle is found in one of the states. The average number of particles in state i is then given by ∞
N̄ i = ∑ p Ni N ,
(2.107)
N=0
also called occupation numbers. EXERCISE: Fermi–Dirac distribution Consider a system of noninteracting fermions, i.e., there can be either one or no particles in each state. What is the average number N̄ i of particles in an arbitrary state i?
EXERCISE: Bose–Einstein distribution Consider a system of noninteracting bosons, i.e., there can be infinitely many particles in each state. What is the average number of particles N̄ i in an arbitrary state i?
2.7.6 Liouville entropy So far we have considered only systems with discrete states i, which is a natural description for quantum systems. The state of a system of N classical particles, on the other hand, can be described by positions and momenta of each particle. The probability that the system is in a state is then expressed by the N-particle distribution function f N (1, . . . , N), where 1 = (r1 , p1 ), . . . , N = (r N , pN ). The space of all positions and momenta is called the N-particle phase space. What is the relation between probabilities of the discrete states p i and the Nparticle distribution function f N ? From the uncertainty relations of quantum mechanics we know that position and momentum of each particle cannot be known exactly at the same time. The uncertainty relations tell us that the volume of the smallest piece
2.7 What is entropy?
| 33
of the phase space representing a quantum state of one particle is one voxel in (r, p) space = h3 ,
(2.108)
where h is the Planck constant. Therefore, the phase space analogue of the probability of one quantum state is the following expression: p i → f N (voxel size for 1) . . . (voxel size for N) d1 . . . dN = f N (1, . . . , N)h3N d1 . . . dN, (2.109) which translates the probability of state i into the distribution function. The probability of states i was normalized to 1, and the sum was meant as the sum over all different states of the system. Assuming that the particles are indistinguishable, the summation can be translated as ∑→ i
1 d1 . . . dN . ∫ N! h3
(2.110)
The integral over the whole N-particle phase space represents the sum over all different quantum states. The normalization then translates as ∑ pi = 1 → 1 = i
1 1 d1 . . . dN f N h3 = ∫ ∫ d1 . . . dN f N . N! N! h3
(2.111)
Entropy (2.76) is then translated to the Liouville entropy S(Liouville) (f N ) = −
kB ∫ d1 . . . dN f N ln (h3N f N ) , N!
(2.112)
which is the classical continuous counterpart of the Shannon entropy.
2.7.7 Boltzmann entropy Instead of describing the system by the complete N-particle distribution function, we can decide to see only some average state of the system. For example, we can choose to describe the state of the system by means of the one-particle distribution function def
f(r, p) =
N 1 ∫ d1 . . . dN ( ∑ δ(i − (r, p))) f N (1, . . . , N) . N! i=1
(2.113)
The definition can be interpreted as the sum (over all particles) of averages over all but the one chosen particle. EXERCISE: Sum of averages Rewrite Definition (2.113) by applying the δ distributions, i.e., as a sum of integrals over N −1 particles.
34 | 2 Levels of description
From the normalization condition (2.111) it follows that ∫ dr ∫ dp f(r, p) = N .
(2.114)
The one-particle distribution function is thus normalized to the number of particles. Formally, the integration is an (usual) abuse of notation for action of generalized functions used especially in probability to generalize the concept of continuous distribution functions to have probability density functions also for discrete random variables [15]. This is the reason why generalized functions are also known as distributions. The principle of maximum entropy (MaxEnt) can now be used to infer the most probable f N subject to the knowledge of f (and normalization of f N ), and consequently the entropy that depends only on the one-particle distribution function f . The maximization proceeds as follows using the functional derivative, (Appendix A.2): 1 δ [−S(Liouville) (f N )+∫ dr ∫ dp f ∗ (r, p)f(f N )(r, p)+ν∗ ∫ d1 . . . dN f N ] = 0, (2.115) δf N N! the solution of which is f N (f ∗ , ν∗ ) =
1 ν∗ 1 exp (−1 − ) exp (− ∑ f ∗ (i)) . 3N kB kB i h
(2.116)
Using the normalization condition (2.111) then leads to 1=
N ν∗ 1 ∗ 1 exp (−1 − ) (∫ dr ∫ dp exp (− f (r, p))) . kB kB N!h3N
(2.117)
Consequently, f , which is given by projection (2.113), becomes f(r, p) =
∗ N−1 1 1 −1− νk∗ − f ∗k(r,p) − f k(2) B Ne B B ) e (∫ d2 e 3N N! h
=N
∗
(r,p) kB ) ∗ ∫ dr ∫ dp exp (− f (rkB,p ) )
exp (− f
,
(2.118)
which determines the dependence f(f ∗ ). This dependence makes it possible to express the estimated f N , Equation (2.116), as a function of f through f N (1, . . . , N) =
N! N Π f(i) . N N i=1
(2.119)
The MaxEnt estimate of f N is thus proportional to the product of the one-particle distribution function evaluated at each particle position. Plugging this back into the Liou-
2.7 What is entropy?
| 35
ville entropy (2.112) leads to S(Boltzmann) (f) = S(Liouville) (f N (f)) N! N! kB ∫ d1⋅ ⋅ ⋅ ∫ dN N Π i f(i) ln (h3N N Π j f(j)) N! N N N N! kB = − N [ (∫ dr ∫ dp f(r, p)) (3N ln h + ln N ) N N ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
=−
≈N(ln h 3 −1) N
+ ∑ ∫ d1 . . . dN ln(f(1)) ∏ f(i)] j
i=1
= −k B ∫ dr ∫ dp f(r, p) (ln (h3 f(r, p)) − 1) ,
(2.120)
where the Stirling approximation ln N! ≈ N ln N − N was employed. Equation (2.120) is the Boltzmann entropy of an ideal gas.
2.7.8 Hydrodynamic entropy of ideal gases The system of classical particles was described by means of the one-particle distribution function in Section 2.7.7. Instead, we can choose to see only first few moments of the distribution function ρ(r) = ∫ dp mf(r, p)
(2.121a)
u(r) = ∫ dp pf(r, p)
(2.121b)
e(r) = ∫ dp
p2 f(r, p) , 2m
(2.121c)
which represent density, momentum density and total energy density of an ideal gas (there is no interaction between the particles). The maximization δ [−S(Boltzmann) (f) + ∫ dr ρ ∗ (r)ρ(r) + ∫ dr u ∗i (r)u i (r) + ∫ dr e∗ (r)e(r)] = 0 δf
(2.122)
gives mρ ∗ (r) + p i u ∗i (r) + 1 f(ρ , u , e )(r, p) = 3 exp (− kB h ∗
∗
∗
p2 ∗ 2m e (r)
) ,
(2.123)
which means that the MaxEnt estimate of the one-particle distribution function is locally Maxwellian although not yet expressed in lower level state variables. To obtain the distribution function f in terms of the hydrodynamic quantities one can either complete the two Legendre transformations as before or use the projections
36 | 2 Levels of description
themselves. Following this second route one gets ∗
ρ = m ∫ dp
1 − mρk∗ (r) − pi uki (r) − p2 e∗ (r) e B e B e 2m = h3 ∗
2
=m
p i u (r) p 1 − mρk∗ (r) − ki − 2mi e ∗ (r) B B dp e e (∫ ) i h3
=m
m 1 − mρk∗ (r) k B 2mπ 3/2 2k(u∗e)∗2 (r) e B ( ) e B , ∗ 3 e h
3
(2.124)
from where we can isolate ρ ∗ as e
∗ (r)
− mρk
B
= h3
3/2 ∗ 2 ρ e∗ − (u ) m ( ) e 2kB e∗ (r) . m k B 2mπ
Similarly, one can proceed with the projection for momentum to get u ∗k = −u k
e∗ ρ
and by combining the last two relations one can obtain a relation ρ = ρ(e∗ ) via e
∗ (r)
− mρk
B
= h3
∗ 3/2 ρ e∗ − me u2 ( ) e 2kB ρ2 m k B 2mπ
finally yielding f in terms of the hydrodynamic quantities ρ, u and e, 3
f(ρ, u, e)(r, p) =
2 e∗ ρ me∗ u p 2 ) exp (− ( − ) ) ( m 2πmk B 2k B ρ m
with e∗ =
ρ 3 kB 2 m (e −
(2.125a)
(2.125b)
u2 2ρ )
being again the inverse local temperature. Plugging these dependencies back into the Boltzmann entropy (2.120) leads to 2
3
2 u ρ 5 m 4πm e − 2ρ S(Euler) (ρ, u, e) = ∫ dr k B ( + ln ( ( 2 ) )) , m 2 ρ 3h ρ/m
(2.126)
which is the hydrodynamic entropy of an ideal gas.
2.7.9 Fundamental thermodynamic relation of ideal gases Finally, projection N=
1 ∫ dr ρ(r) m
E = ∫ dr e(r)
(2.127a) (2.127b)
2.7 What is entropy?
| 37
leads to the equilibrium fundamental thermodynamic relation (FTR) of an ideal gas. Maximization of the hydrodynamic entropy of an ideal gas (2.126) leads to the spatially homogeneous state with ρ = mN/V, u = 0 and e = E/V. Plugging this back into the hydrodynamic entropy, we obtain the Sackur–Tetrode relation, 3
S(Sackur-Tetrode) (E, V, N) = k B N (
5 V 4πm E 2 + ln ( ( 2 ) )) , 2 N 3h N
(2.128)
which is the entropy of an ideal gas in thermodynamic equilibrium. For example temperature, pressure and chemical potential of an ideal gas can be calculated as follows: ∂S 3 N = kB ) ∂E V,N 2 E N ∂S p = kB =( ) T ∂V E,N V
T −1 = (
(2.129a) (2.129b) 3
∂S V 4πm E 2 μ = −T ( = −k B T ln ( ( 2 ) ) . ) ∂N E,V N 3h N
(2.129c)
The expression for temperature can be rewritten as E=
3 k B TN . 2
(2.130)
The expression for pressure can be rewritten as pV = Nk B T .
(2.131)
Finally, the expression for chemical potential can be rewritten as 3
2 k B T 2πm ( 2 k B T) ) μ = −k B T ln ( p h
5/2 (2πm)3/2 h−3 ) + k B T ln p , = −k B T ln ((k B T) ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(2.132)
= μ 0 (T)
where the part dependent on temperature and the part dependent on pressure are separated. Note that the temperature dependent part is a function of mass of the particles and thus it depends on the particular chemical species. Note that we have considered only classical particles. If quantum effects were taken into account, the temperature dependent part would be changed; see e.g., [5]. The Sackur–Tetrode entropy (2.128) can also be obtained by a direct application of MaxEnt from the Boltzmann level (with Boltzmann entropy (2.120)) to the equilibrium level, i.e., by projection N = ∫ dr ∫ dp f(r, p) E = ∫ dr ∫ dp
p2 f(r, p) . 2m
(2.133a) (2.133b)
38 | 2 Levels of description
EXERCISE: Sackur–Tetrode entropy Derive the formula for entropy of ideal gas (2.128) by MaxEnt defined by projection (2.133). In other words, take Boltzmann entropy (2.120) and find the distribution function that maximizes it subject to the constraints represented by projection (2.133).
EXERCISE: Concave entropy Verify that entropy (2.128) is concave. Hint: Use the relations from Section 2.5.
In summary, the principle of maximum entropy (MaxEnt) leads from the Boltzmann entropy (2.120) to the Sackur–Tetrode relation (2.128), which expresses entropy of an ideal gas in equilibrium. Notably, this result is unaffected by proceeding directly or in steps via intermediate (mesoscale) levels. This crucial aspect of changing levels serves as confirmation of consistency of this approach.
2.7.10 Entropy of photons 2.7.10.1 Kinetic entropy of photons Entropy of a system of bosons (e.g., photons) was derived in [5], S(N1 , N2 , . . . ) = −k B ∑ G i (N i ln N i − (1 + N i ) ln(1 + N i )) ,
(2.134)
i
where G i is the number of states in group i and N i is the occupation number (average number of particles) in group i. Our aim is now to rewrite this entropy as a function of the one-particle distribution function f(r, p) of the photons. Analogously to the transition from the Shannon entropy to the Liouville entropy in Section 2.7.6, entropy (2.134) becomes S(ph) (f(r, p)) = −
kB ∫ dr ∫ dp (h3 f ln(h3 f) − (1 + h3 f) ln(1 + h3 f)) . h3
(2.135)
This is the entropy of the system of photons on the Boltzmann level of description. Energy of a photon is e(ph) = ℏω =
h 2π h = c = c|p| , 2π τ λ
(2.136)
where τ is period of the photonic wave, λ wavelength, c speed of light and p = ℏk momentum of the photon, |k| = 2π/λ being the wave number. Energy of the photon gas is thus 1 E(ph) (f) = 3 ∫ dr ∫ dp h3 f(r, p)c|p| , (2.137) h which depends on the distribution function f(r, p).
2.7 What is entropy? |
39
2.7.10.2 Hydrodynamic entropy of photons The distribution function f(r, p) contains the whole space dependent information about momenta of the photons. It will be advantageous to work only with fields u(r) = ∫ dp pf(r, p)
(2.138a)
e(r) = ∫ dp c|p|f(r, p) ,
(2.138b)
which represent momentum and energy densities of the photon gas. From maximization of entropy (2.135) subject to the knowledge of u(r) and e(r), 0= it follows that
δ (−S(ph) (f) + ∫ dr u∗ ⋅ u(f) + ∫ dr e∗ (r)e(f)) , δf
f ̃(u∗ , e∗ ) =
1 1 , h3 exp ( u∗ ⋅ p) ⋅ exp ( e∗ c|p|) − 1 kB kB
(2.139)
(2.140)
which is the MaxEnt estimate of f expressed in terms of the conjugate fields u∗ and e∗ . Note that the integral of the distribution function over the p-space converges only if |u∗ | < e∗ c, which means that mean velocity (interpreted as conjugate momentum multiplied by temperature) is lower than speed of light. The mean velocity thus of course cannot exceed the speed of light. In order to express the distribution function in terms of u and e we have to find the conjugate fields as functions of u and e as solutions to Equations (2.138) with f ̃. However, we will no longer investigate this route, more details of which can be found in [16]. 2.7.10.3 Equilibrium entropy of photons Instead we focus on the equilibrium fundamental thermodynamic relation implied by entropy (2.135) and energy (2.137). Maximization of the entropy subject to the knowledge of the energy proceeds as follows: δ (−S(ph) (f) + E∗ E(ph) (f)) δf 1 = −k B ln (1 + 3 ) + E∗ c|p| , h f
0=
(2.141)
which gives 1 1 , (2.142) ∗ h3 e EkB c|p| − 1 which is in fact the Planck radiation law. To express this distribution function in terms of energy instead of conjugate energy E∗ = T −1 , we have to solve the equation f ̃(E∗ ) =
E(ph) = ∫ dr ∫ dp c|p|
1 1 , h3 e α|p| − 1
(2.143)
40 | 2 Levels of description where α = c/k B T. Since the integral depends only on the magnitude of p, it simplifies in spherical coordinates to ∞
E(ph) = 2
e−αp 4πcV ∫ dp p3 3 1 − e−αp h 0
∞
∞
0
0
4πcV ∞ 4πcV ∞ = 2 3 ∑ ∫ dp p3 e−αp e−αpn = 2 3 ∑ ∫ dp p3 e−αpn h h n=0 n=1 4πcV ∞ 1 24πcV = 2 3 ∑ 4 4 Γ(4) = 2 3 4 ζ(4) h h α n=1 α n =
8π5 cV(k B T)4 . 15h3 c3
(2.144)
Note the extra factor 2 by which the total energy was multiplied in order to take into account the two polarizations of photons. Therefore, total energy density of the photon gas becomes E 8π5 cVk 4B 4 4 4 T = σT , (2.145) = V c 15h3 c3 where 2π5 k 4B (2.146) σ= 15h3 c2 is the Stefan–Boltzmann constant; see Section 63 of [5]. In summary, the Boltzmann-like entropy of bosons (2.135) is the entropy of the photon gas on the Boltzmann level of description. By projection to the total energy we obtain the Planck radiation law and energy density of the photon gas in thermodynamic equilibrium.
2.7.11 Entropy of van der Waals fluid So far we have considered only noninteracting systems because calculations can then be usually drawn to the end explicitly and because such idealized contributions are the first approximations to the real fundamental thermodynamic relations and equations of state. Let us now take a step towards the reality. 2.7.11.1 Equilibrium level Results of equilibrium thermodynamic measurements sometimes show discontinuities. For example, if pressure p is measured as a function of the volume V for a constant temperatures and a constant number of moles N, then the function P = P(V) (we shall refer to it as an isotherm) shows a discontinuity in the first derivatives at the points where phase changes occur (e.g., gas becomes a liquid). How can such discontinuities be represented by smooth functions S(E/V, N/V)? The idea is that the
2.7 What is entropy?
| 41
phenomena that manifest themselves in experimental observations as discontinuities are expressed in certain geometrical features (e.g., loss of convexity) associated with (still smooth) fundamental thermodynamic relations. As we have seen in Section 2.7.9 the fundamental thermodynamic relation (2.128) is concave for all admissible parameters and state variables. In addition, we do not expect phase transitions to occur in ideal gases. Hence, for our illustration we have to begin by modifying Equation (2.128). We introduce the following two parameters, a > 0 and b > 0, to generalize entropy (2.128): E N c V S = N Ŝ 0 + NR ln [( + a ) ( − b)] . N V N
(2.147)
If Ŝ 0 = 5/2k B , c = 3/2, a = 0 and b = 0, then the standard ideal gas entropy is recovered in Equation (2.128). Note that N is interpreted as number of moles here. Entropy (2.147) will be referred to as the van der Waals entropy. The landscape corresponding to entropy (2.147) is more complex than the one corresponding to entropy (2.128). We can see it easily on the isotherms. In the same way as we have arrived from relation (2.128) to (2.131), we arrive now to P=
NRT N 2 − a( ) . V − bN V
(2.148)
This equation is the van der Waals equation of state. The family of isotherms (a family of graphs of the functions P = P(V) parametrized by the temperature) is no longer a family of hyperbolas as in the case of an ideal gas. As we easily see from relation (2.148), for temperatures that are smaller than Tcritical = which is the solution to ∂P = 0 and ∂V
8 a , 27R b ∂2 P =0, ∂V 2
(2.149)
(2.150)
the isotherms appear to be composed of three parts (see [5] or [2] for nice figures): one part in the form of a curve that resembles hyperbola for small V (we shall call it a liquid part or L-part), another part that also resembles a hyperbola for large V (we shall call it gas part or G-part), and a curve joining them (the transition part) that has the form of a wave (i.e., a curve having one minimum and one maximum). The joining is, of course, completely smooth, and the isotherms remain smooth. It is easy to see that in the interval of the volume where, on the isotherms, P increases when V increases, the convexity of the fundamental thermodynamic relation is lost. The experimentally observed isotherms for the temperatures T < Tcritical are indeed composed of three parts: L-part, G-part, and a part joining them. The joining part is a horizontal straight line. The two points of intersection of the straight line with the L-part and G-part are the points of phase transition where the first derivative of the
42 | 2 Levels of description
isotherm (i.e., ∂P/∂V) is discontinuous. This means that in order for the isotherms to agree (at least qualitatively) with experimental observations, the wavy transition parts on the isotherms have to be replaced by horizontal straight lines. This can be done, as we shall see below, by interpreting the appearance of a minimum and maximum on the isotherms as an appearance of two phases (phase G and phase L) and by applying the maximum entropy principle. Let the two phases be separated by a wall open to particle exchange. By applying the maximization of entropy, the condition of equilibrium (analogous to Equations (2.11), but with numbers of particles instead of energies) is the equality μ G = μ L of chemical potentials of the two phases. On the isotherms, this condition has a very clear geometrical interpretation. We now proceed to derive it. It follows from the Gibbs– Duhem relation (2.8) that S V dμ = − dT + dP . (2.151) N N Hence on the isotherms, the equilibrium condition μ G − μ L = 0 takes the form G
∫(
V ) dP = 0 . N
(2.152)
L
From the geometrical point of view, this means that the wavy transition part is replaced by a horizontal straight line cutting through it. The placement of the straight line is determined by requiring that the total area between the straight line and the wavy line equals zero. This is the celebrated equal area construction. Summing up, if a loss of convexity of the fundamental thermodynamic relation, or in other words an appearance of more than one maxima on its landscape, is interpreted as an appearance of different phases, then application of the maximum entropy principle to such a situation leads to a modified landscape involving discontinuities. 2.7.11.2 Boltzmann level Now we turn our attention to the van der Waals fluid on the Boltzmann level of description. By discussing it on a more microscopic level, we expect to throw light on the physics that is behind the two-parameter deformation (2.147) of the fundamental thermodynamic relation (2.128) and also on the equal area construction. As in Section 2.7.7 we regard the system under consideration as being composed of molecules, and we also choose the same state variable f(r, p). Contrary to the situation in the previous example, we let the molecules interact. We shall take into account only two-particle interactions and assume that the interaction potential ε(R) is a sum of two parts, ε(R) = εlr (R) + εsr (R) . (2.153) The term εlr (R) generates long range attractive forces while εsr (R) generates short range repulsive forces, and R stands for |r1 −r2 | with ri , i = 1, 2, being position vectors of two molecules.
2.7 What is entropy?
| 43
Particle density n(f) is the same as in Section 2.7.7, n=
1 ∫ dr ∫ dp f(r, p) . V
(2.154a)
The energy density e(f) will change due to interactions among the molecules to e(f) =
p2 1 1 f(r, p) + ωlr (ϱ) , ∫ dr ∫ dp V 2m V
(2.154b)
where ϱ(r) = ∫ dp f(r, p) .
(2.155)
The short range forces will be regarded as constraints on the motion of molecules and as such they will modify the entropy (2.120). Indeed, if we interpret, following for example Shannon [11] and Jaynes [3], the eta function as a measure of information and thus also a measure of order, it is to be expected that an introduction of constraints will change it. We shall assume that S(f) = −k B ∫ dr ∫ dp f(r, p)(ln(h3 f(r, p)) − 1) − k B ωsr (ϱ) ,
(2.156)
where ωsr (ϱ) is a functional that remains at this point unspecified. We have now all we need to proceed to the Legendre projection. Maximization of entropy (2.156) subject to the knowledge of e(f) and n(f) (given by Equations (2.154)) proceeds as 0 = Φf =
δ [k B ∫ dr ∫ dp f(r, p)(ln(h3 f(r, p)) − 1) + k B ωsr (ρ) δf + e∗ (∫ dr ∫ dp
p2 f(r, p) + ωlr (ρ)) 2m
+ n∗ ∫ dr ∫ dp f(r, p)] = kB ln(h3 f(r, p)) + e∗
p2 + k B (ωsr )ϱ(r) + e∗ (ωlr )ϱ(r) + n∗ , 2m
(2.157)
where Φ is the thermodynamic potential (compare with Equation (2.20)) Φ(f) = −S(f) +
μ 1 E(f) − N(f) . T T
(2.158)
Using Equation (2.7), which is valid for homogeneous systems, the potential evaluated at the equilibrium value of f becomes equal to −PV/T. The solution to Equation (2.157) is (denoting e∗ as T −1 and n∗ as −μ/T) fth (r, p) = (
3/2 1 p2 ) ϱ th (r) exp (− ) , 2πmk B T 2mk B T
(2.159)
44 | 2 Levels of description where the number density ϱ th (r) was introduced as def
ϱ th (r) = ∫ dp fth (r, p) =
∗ 1 − δωsr − e (2πmk B T)3/2 e δϱ e kB 3 h
δω lr δϱ
μ
e kB T ,
(2.160)
which means that ϱ th is a solution to integral equation ln ϱ(r) + (ωsr ) ϱ(r) +
μ 2πmk B T 1 3 =0. )− (ωlr ) ϱ(r) − ln ( kB T 2 kB T h2
(2.161)
To complete the Legendre transformation we evaluate potential (2.158) at the equilibrium distribution function (2.159) and arrive at PV = ∫ dr ϱ th (r) kB T
) − (ωsr (ϱ th ) − ∫ dr ϱ th (r) (ωsr )ϱ(r) ϱth (r) 1 ) . − (ωlr (ϱ th ) − ∫ dr ϱ th (r) (ωlr ) ϱ(r) ϱth (r) kB T
(2.162)
In order to make the fundamental thermodynamic relation (2.162) explicit, we have to solve Equation (2.161). We now begin to do it by looking for a solution in the form ϱ th (r) = ϱ th = const. = n , (2.163) where the last equality follows from Equations (2.154a) and (2.155). Let us now pose a question whether it is possible to write the equation of state of a van der Waals fluid in terms of the presented Hamiltonian framework on the Boltzmann level, i.e., via identification of suitable ωlr , ωsr functionals. Note that N = nV/N A and that it holds δω/δρ = V −1 ∂ω(n)/∂n when ρ(r) = n and ω = ∫ dr f(ρ). From Equation (2.162) we have PV 1 = nV − (ωsr − nV(ωsr )ρ ) − (ωlr − nV(ωlr )ρ ) kB T kB T ωlr ωsr V − (ωsr )ρ ) − ( − n(ωlr )ρ )] . = [k B nT (1 − kB T nV V
(2.164)
Hence the fundamental thermodynamic relation (2.148) is obtained if −
̃ 2V bn = ωsr (n) − n∂ n ωsr (n) ̃ 1 − bn
(2.165)
̃ 2 = ωlr (n) − n∂ n ωlr (n) an
(2.166)
with b̃ = b/N A and with ã = aV/N A2 . Both conditions are linear differential equations with the following set of solutions: 1 n 2 ωlr = −a ( ) V NA 1 ωsr = −n ln(1 − bn/N A ) . V
(2.167a) (2.167b)
2.7 What is entropy? |
45
Indeed, direct verification confirms that with this choice the relation (2.162) transforms into (2.148). We have thus proven that the modifications (2.154b) and (2.156) of the ideal gas specifications of e(f) and S(f) (Section 2.7.9) corresponds, on the mesoscopic level L on which f(r, p) serves as the state variable, to the modification (2.148) of the ideal gas fundamental thermodynamic relation (2.131). The specification (2.167) of ωsr (ϱ) and ωlr (ϱ) has arisen indirectly from the requirement that the Legendre projection of the formulation on the level L to the level of equilibrium thermodynamics agrees with relation (2.148). Can we provide a direct physical interpretation of relations (2.167)? The answer is dependent on the actual choices of interaction energy and entropy. For example for ωlr (ϱ) =
1 ∫ dr1 ∫ dr2 ε(|r1 − r2 |)ϱ(r1 )ϱ(r2 ) , 2
(2.168)
where we expect that the contribution from the far field (long range interaction) will be dominant over the short range interactions, the assumption of constant density ρ(r) = n yields exactly Equation (2.167a) once a/N A2 = −ε0 /2 where ε0 = ∫ dr ε(|r|). The physical interpretation of the second line in (2.167) is less straightforward; see [5]. We shall now consider a different choice of interaction energy and entropy in continuing to investigate other possible solutions to Equation (2.161). To be specific, we shall discuss solutions to Equation (2.161) with ωlr ωlr (ϱ) =
1 1 ∫ dr ε0 ϱ 2 (r) − ∫ dr1 ∫ dr2 ε(|r1 − r2 |)(ϱ(r1 ) − ϱ(r2 ))2 , 2 4
(2.169a)
which obviously reduces to (2.167a) if ϱ(r) = n, and with ωsr = − ∫ dr ϱ(r) ln(1 − bϱ(r)) ,
(2.169b)
which also becomes the same as in (2.167b) if ϱ(r) = n. The number density ϱ(r) (2.163) is not necessarily the only solution of Equation (2.161). Among other possible solutions, we shall particularly search for those that are spatially inhomogeneous. Such solutions are of great interest to us, since they are expected to represent a two phase system. Indeed, appearance of a new phase (in our case liquid) will clearly be expressed in terms of the state variable f(r, p) as appearance of an inhomogeneity in the dependence on r. We shall not study systematically all possible solutions of Equation (2.161) as we shall limit ourselves only to showing that spatially inhomogeneous ϱ(r), for which ϱ(r) = n g in one region and ϱ(r) = n l in another region, can only be solutions of (2.161) if the equal area construction is satisfied. The proof that we shall present below is due to van Kampen [17].
46 | 2 Levels of description
With relations (2.169) equation (2.161) takes the form 0 = ln ϱ(r) − ln(1 − bϱ(r)) + −
1 2πmk B T bϱ(r) 3 + ϵ0 ϱ(r) − ln ( ) 1 − bϱ(r) k B T 2 h2
μ 1 1 − ∫ dr1 ε(|r − r1 |)(ϱ(r) − ϱ(r1 )) . kB T 2 kB T
(2.170)
We now make two simplifying approximations. By expanding 1 j ϱ(r) ≈ ϱ(r1 ) + (r i − r1i )∂ i ϱ r1 + (r i − r1i )(r j − r1 )∂ i ∂ j ϱ r1 , 2
(2.171)
the last term on the right hand side of Equation (2.170) is approximated by ε2 ∇2 ϱ(r), where ε2 = ∫ dr r2 ε(|r|), and where isotropy of ϱ(r) was assumed so that the linear contribution disappears. We shall now limit ourselves only to one dimension (i.e., we replace r ∈ ℝ3 by x ∈ ℝ). Equation (2.170) can be regarded as Newton’s equation of motion if we interpret x as the time and ϱ as a position vector, ε 2 d2 ϱ d = − ψ(ϱ) , 2k B T dx2 dϱ
(2.172a)
where ψ(ϱ) = ϱ ln (
1 − bϱ ε2 2 3 2πmk B T )) + ) + ϱ (1 + ln ( ϱ 2 ϱ 2 4k B T h
(2.172b)
is the ‘potential’. It is now obvious that solution of Equation (2.172) of the type ϱ(x) = n g in one region and ϱ(x) = n l in another region can exist only if ψ(n l ) = ψ(n g ) (i.e., if the potential reaches the same height). This equality is then the equal area construction. Considering evolution of the van der Waals fluid, one can again address it on both the Boltzmann level of description or the level of fluid mechanics. For the former approach see [18] or [19], while for the latter approach see [20], where it is shown that the Korteweg equations from Section 3.7.4 naturally arise in the case of a van der Waals fluid. Summing up, we have seen that by considering a van der Waals fluid on the level L, on which the one-particle distribution function serves as the state variable, instead of on the level of thermodynamic equilibrium, we have made the following progress: 1. The phenomenological modification (2.148) of the ideal gas fundamental thermodynamic relation that we made on the equilibrium level has a clear physical meaning. The van der Waals fluid is regarded as a fluid composed of molecules that interact through long range attractive and short range repulsive forces. The presence of the former type of forces is expressed in the contribution ωlr to the energy and the latter in the modification of the entropy ωsr . 2. Appearance of more phases presents itself as appearance of multiple solutions to the problem of maximizing the entropy.
2.7 What is entropy?
| 47
2.7.12 Equilibrium statistical mechanics and loss of convexity One consequence of the Gibbs micro-macro transformation does not agree with results of observations. One can show that for finite N, however large, the fundamental thermodynamic relation emerging on the output is always smooth and cannot thus represent phase transitions and critical phenomena in the way they are formulated mathematically in classical equilibrium thermodynamics. Numerical calculations of the Gibbs micro-macro transformation (performed always, of course, for finite N) indicate that graphs of the output functions that in classical equilibrium thermodynamics should have corners have indeed such corners but the corners are always ‘round’, which makes them invisible without calculating all the details of the functional dependence. The ‘round’ corners can be made easily detectable by either replacing ‘round’ by ‘pointy’ or by making a ‘wiggle’ at the corner (for example like in the case of the van der Waals fluid; Section 2.7.11). The first modification has been achieved by letting some of the parameters in the input reach (in an appropriately defined topology) a limit (e.g., the so called thermodynamic limit: N → ∞, V → ∞, N/V → const.). The second modification has been achieved by restricting the state variables to some appropriate submanifolds and only then proceeding with the maximization of entropy. The first method has led to a new and very elegant mathematical formulation of the Gibbs micro-macro transformation, known under the name ‘thermodynamic formalism’ [21], in which surprising relations to mathematical and physical theories like quantum field theories emerge. In this book we shall follow the second route. On this route the phase transitions become visible as an emergence of multiple solutions to the problem of maximizing the entropy. We shall see later that the second route is also closely related to the investigation of mesoscopic and macroscopic time evolution.
2.7.13 Suspension of elastic dumbbells Molecules of polymers are often well approximated as dumbbells (two beads connected with a spring), the ends of which correspond to the ends of the polymeric chains. Denoting the positions of the ends of a dumbbell as r1 and r2 , their relative position is R = r2 − r1 while their center of mass is at r = (r1 + r2 )/2. A distribution function expressing the probability that the ends of a dumbbell are at r1 and r2 , f(r1 , r2 ), can be thus expressed in the form f(r, R). Distribution function f(r, R) tells us the probability that the center of a dumbbell is at r while the relative position of the ends of the dumbbell are R. Taking into account also momenta of the beads, the distribution function expressing position and momenta of the dumbbell is f(r, R, p1 , p2 ). This distribution function can be transformed to f2 (r1 , r2 , p1 , p2 ), which is the two-particle distribution function of the beads of the dumbbell; see also Section 5.6.3. The Liouville entropy (2.112) for
48 | 2 Levels of description
the two-particle distribution function is S(L2) = −k B ∫ dr ∫ dR ∫ dp1 ∫ dp2 f(r, R, p1 , p2 ) ln (h6 f(r, R, p1 , p2 )) ,
(2.173)
where we have already carried out the transformation (r1 , r2 ) → (r, R). The two-particle distribution function contains too much detail than is most often necessary for description of a polymeric fluid. Therefore, we will use only projected state variables n(r) = ∫ dR ∫ dp1 ∫ dp2 f(r, R, p1 , p2 )
(2.174a)
c ij (r) = ∫ dR ∫ dp1 ∫ dp2 R i R j f(r, R, p1 , p2 ) ε(r) = ∫ dR ∫ dp1 ∫ dp2 (
(2.174b)
p21 p2 + 2 ) f(r, R, p1 , p2 ) , 2m 2m
(2.174c)
where n(r) is the field of dumbbell concentration, c(r) is the conformation tensor, expressing elongation of the springs, and ε(r) is the field of kinetic energy density (per volume) of the beads. Maximization of entropy (2.173) subject to the knowledge of state variables (2.174) means that 0=
δ ( − S(L2) + ∫ dr n∗ (r) ∫ dR ∫ dp1 ∫ dp2 f δf + ∫ dr c∗ij (r) ∫ dR ∫ dp1 ∫ dp2 R i R j f + ∫ dr ε∗ (r) ∫ dR ∫ dp1 ∫ dp2 (
p21 p2 + 2 ) f) , 2m 2m
(2.175)
which leads to the MaxEnt estimate of the distribution function f̃ =
c∗ij p22 1 n∗ ε∗ p21 i j exp (−1 − ) exp (− R R ) exp (− ( + )) . kB kB k B 2m 2m h6
(2.176)
The task is now to express this distribution function in terms of state variables (2.174) instead of the conjugate variables n∗ , c∗ and ε∗ . Concentration of the dumbbells becomes (using Equation (2.176)) c∗
n=
1 −1− nk∗ 2πmk B 3/2 2πmk B 3/2 − ij R i R j B ( e ) ( ) ⋅ ∫ dR e kB . ∗ ∗ 6 ε ε h
To calculate the integral, we will change the R coordinate to R̂ so that ∂ R̂ k ∂ R̂ l δ kl ∂R i ∂R j ∂R i ̂ k R Ri = ∂ R̂ k
c∗ij =
(2.177a) (2.177b)
2.7 What is entropy? |
and thus
j c∗ij R i R j = (Q−1 )ki (Q−1 )lj δ kl Q im R̂ m Q n R̂ n = R̂ 2 ,
49
(2.177c)
where the transformation matrix (constant in R but dependent on r) was denoted by ∂R i . ∂ R̂ k
Q ik =
(2.177d)
Using this transformation, the dumbbell concentration becomes n= =
1 −1− nk∗ 2πmk B 3 ̂2 B ( e ) ⋅ ∫ d R̂ det Qe−R /kB ∗ 6 ε h 1 −1− nk∗ 2πmk B 3 B ( e ) det Q(πk B )3/2 . ε∗ h6
(2.178)
Energy density ε is then given as the derivative of the expression for n with respect to
ε∗ , ∂n(n∗ , c∗ , e∗ ) 1 −1− nk∗ (2πmk B )3 B = 3k B 6 e det Q(πk B )3/2 ∗ ∂ε (ε∗ )4 h n = 3k B ∗ . ε
ε = −k B
(2.179)
This follows from comparison of the definitions of n and ε evaluated at the MaxEnt distribution (2.176). Finally, the conformation tensor evaluated at the MaxEnt distribution function becomes ∗
c ij = ∫ dR R i R j =
1 −1− nk∗ B e h6
1 −1− nk∗ − ckkl R k R l 2πmk B 3 B e B e ⋅( ) 6 e∗ h 2πmk B 3 ̂2 j ( ) det QQ im Q n ∫ d R̂ R̂ m R̂ n e−R /kB e∗ ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ 5/2
= δ mn π3/2 kB /2
=
kB i j kB ij nQ k Q k = n ((c∗ )−1 ) . 2 2
(2.180)
This is the MaxEnt value of the conformation tensor. Entropy on the level of description with state variables (2.174) is then the Liouville entropy (2.173) evaluated at the MaxEnt value (2.176) expressed in terms of the state
50 | 2 Levels of description
variables (not the conjugate variables). Entropy of the dumbbell suspension is then ∗ n∗ c ij i j ε∗ p21 + p22 S = −k B ∫ dr ∫ dR ∫ dp1 ∫ dp2 f ̃ (−1 − − RR − ) kB kB k B 2m
2πmk B 3 − ln det Q − ln(πk B ) = −k B ∫ dr ∫ dR ∫ dp1 ∫ dp2 f ̃( ln n + ln h6 − 3 ln ∗ ε 2 −
−1 ε∗ p21 + p22 c ij i j k B n RR − ) k B 2m kB 2
2πmk B 3 ε∗ 1 n ln(πk − n ln det Q − ) − ε − nc−1 c ij ) B 2 kB 2 ij h2 ε∗ 2πm ε 1 2 3 ) ) ) − n ln (det c ( = −k B ∫ dr (n ln n − 3n ln ( 2 2 nk B h 3n
= −k B ∫ dr (n ln n − 3n ln
− = ∫ dr kB n (
3 3n 3 n ln(πk B ) − ε − n) 2 ε 2
23/2 π3/2 m ε 1 det c 9 − 2 ln n + 3 ln ( ) + ln ) . 2 n 2 n 3h2 (2.181)
Entropy thus contains a term proportional to ln det c, which to the best of our knowledge first appeared in [22]. In summary, the two-particle Liouville distribution function describes positions and momenta of the ends (beads) of the dumbbells. Concentration, conformation tensor and kinetic energy density of the dumbbells are given by projection (2.174). Entropy of the dumbbell suspension on the kinetic level is the two-particle Liouville entropy (2.173). The projection to the dumbbell state variables (2.174) then yields the dumbbell entropy (2.181).
2.7.14 Is entropy subjective or objective? Consider a system of classical noninteracting particles. The system can be described by means of the N-particle distribution function, and the corresponding entropy is the Liouville entropy (2.112). Alternatively, f N can be projected to the one-particle distribution function f , and the entropy becomes the Boltzmann entropy (2.120). Finally, f can be projected to E, V and N, and the entropy becomes the Sackur–Tetrode expression for entropy of an ideal gas. Which entropy is the right one? All of them are. It depends, however, on how we decide to describe the system – which level of description we choose. In this sense, entropy is a subjective quantity, as demonstrated in Table 2.1. On the other hand, once the level of description is chosen, entropy is set and it is also objective in this sense.
2.7 What is entropy? |
51
↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑
before 1946
time
entropy
Tab. 2.1: Demonstration of entropy perception on different levels of description/perception. A computer (artificial intelligence, AI) would likely see/recognize (note the year of the edition of this book as this might soon not be true) this figure as follows dependent on the year of make (note the explicit violation of the second law!):
↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↓
1946 (‘first’ computer) 1957 (first scanner) ∼1974 (optical character recognition software) recently recently now? not yet?
nothing – computer/AI did not exist (yes, dear reader, such strange times did exist) nothing (could not ‘see’ and hence interpret a figure) a drawing a drawing with letters words and letters a cloud of words a cloud of words related to a someone/something face of a particular person represented by a cloud of words characterizing that person via data mining
3 Hamiltonian mechanics 3.1 Classical mechanics 3.1.1 Newton’s laws A system of classical particles evolves in accordance with Newton’s laws, r ̇i = v i ,
(3.1a)
ṗ i = F i
(3.1b)
with p i = mv i , which means that a change of position¹ per time is velocity and that a change of momentum per time is force. The force can be either some interaction force between the particles or some external force exerted on the particles. These equations constitute classical Newtonian mechanics.
3.1.2 Hamilton canonical equations Let us now focus on the Hamiltonian formulation of mechanics because it is the Hamiltonian setting that will be most useful when formulating reversible evolution on all lower levels of description. When external forces are not present (or when the external fields are potential and static), Newton’s laws (3.1) can be rewritten as ∂H pi = ∂p i m i ∂H ∂V ṗ i = − =− ∂r i ∂r i r ̇i =
(3.2a) (3.2b)
for Hamiltonian (or energy) H(r, p) = ∑ i
p2i + V(r) , 2m i
(3.2c)
which consists of kinetic and potential energy. Hamiltonian plays the role of conserved energy of the system. Equations (3.2a) can be rewritten in a more compact form as d r Hr Hp 0 1 ) , ( )=( )⋅( ) = ( dt p Hp −Hr −1 0 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(3.2d)
def
=L
where derivatives with respect to the state variables x = (r, p) were denoted by subscripts. The right hand side of this equation is composed of a matrix L called Poisson bivector and of derivatives of energy with respect to state variables.
1 Index i stands for a Cartesian component of the position vector of a particle. https://doi.org/10.1515/9783110350951-003
54 | 3 Hamiltonian mechanics
Finally, the Poisson bivector generates the canonical Poisson bracket {A, B}(CM) = Ax ⋅ L ⋅ Bx = Ar ⋅ Bp − Br ⋅ Ap .
(3.3)
Later in this book, however, we will use many different Poisson brackets and so from now on we will refer to the Poisson bracket constructed by means of bivector (3.2d) as the Poisson bracket of classical mechanics {∙, ∙}(CM) . Equation (3.19) shows how Poisson brackets are constructed from Poisson bivectors in general, i.e., for a general set of state variables x. The state variables determine the Poisson bivector, from which the Poisson bracket can be constructed. Conversely, once a Poisson bracket is specified, the Poisson bivector can be calculated as L ij = {x i , x j }(CM) .
(3.4)
The bracket and the bivector are thus equivalent. Please see Appendix A.5 for a more detailed exposition on this matter. Poisson brackets also fulfill a remarkable identity {A, {B, C}} + {B, {C, A}} + {C, {A, B}} = 0 ,
(3.5)
the Jacobi identity. Later in this chapter we will discuss the physical and geometrical meaning of this identity. EXERCISE: Jacobi identity Verify Jacobi identity (3.5) for Poisson bracket (3.3).
The beauty of Hamilton canonical equations (3.2) is that the evolution is separated into two building blocks: the Poisson bivector and energy (or Hamiltonian). The Poisson bivector expresses kinematics of any system of particles while the energy is a property of each concrete system of particles. The Poisson bivector is the component of evolution that is the same for all systems of particles while the concrete nature of the system is encoded into energy. Finally, the Poisson bivector generates a Poisson bracket and vice versa. Poisson brackets will play a key role when formulating dynamics on different levels of description later in this book.
3.1.3 Variation principle Canonical Hamiltonian mechanics is equipped with a natural variational principle. Consider the action T
̇ S(r(0), r(T)) = ∫ dt (−H(r(t), p(t)) + p(t) ⋅ r(t)) 0
(3.6)
3.1 Classical mechanics |
55
for arbitrary but fixed boundary conditions. Variations of this action with respect to r and p are δS = −Hr − ṗ δr δS 0= = −Hp + ṙ , δp 0=
(3.7a) (3.7b)
and the right hand sides vanish if and only if Hamilton canonical equations are satisfied. Canonical Hamiltonian mechanics can be regarded as a consequence of a principle of least action, with action defined by Equation (3.6). Instead of describing the system in terms of positions r and momenta p, one can choose to describe it in terms of positions and velocities r.̇ In fact, when plugging solutions to Equations (3.7) into action (3.6), we obtain T
̇ S(r(0), r(T)) = ∫ dt L(r(t), r(t)) ,
(3.8)
0
where ̇ + p(r, r)̇ ⋅ ṙ L(r, r)̇ = −H(r, p(r, r))
(3.9)
is the Lagrangian. The Lagrangian is Legendre transformation of the Hamiltonian. By variation of action (3.8), we obtain the Lagrange equations of motion, and the Legendre transformation of L (transforming ṙ to p) gives back the original Hamiltonian. The Lagrangian description is the Legendre transformation of the Hamiltonian description and vice versa.
3.1.4 Symmetries Let us now go back to the systems of particles described by positions and momenta of all particles r i and p i , which are equipped with the canonical Poisson bracket (3.3). There is a special class of transformations R(r, p) and P(r, p) which leave the Poisson bracket intact, i.e., {R i , P j }(CM) = δ ij . (3.10) Such transformations are referred to as the canonical transformations. In fact, any solution at a later time of the Hamilton canonical equations can be regarded as a canonical transformation of the initial configuration. Canonical transformations can become tremendously complex. Let us therefore consider only such transformation where R and P differ from r and p only infinitesimally; we consider only infinitesimal canonical transformation.
56 | 3 Hamiltonian mechanics
How can infinitesimal canonical transformations be generated? Consider a function g(t, r, p). Then the transformation R i = r i + ε{r i , g}
(3.11a)
P i = p i + ε{p i , g}
(3.11b)
is surely infinitesimal. The Poisson bracket is meant to be the {∙, ∙}(CM) bracket, but we omit the superscript CM for the moment so that the equations do not become too cluttered. Evaluating the Poisson bracket of R i and P j , {R i , P j } = {r i , p j } + ε{r i , {p j , g}} + ε{{r i , g}, p j } + O(ε)2 = δ ij + ε ({r i , {p j , g}} + {p j , {g, r i }}) + O(ε)2 Jacobi
= δ ij − ε{g, {r i , p j }} + O(ε)2 = δ ij − ε{g, δ ij } + O(ε)2 = δ ij + O(ε)2 ,
(3.12)
it follows² that infinitesimal transformation (3.11) is canonical (up to the order O(ε)2 ). For example, taking g equal to momentum, g = p i , the transformation becomes Ri = ri + ε ,
Pi = pi ,
(3.13)
which is a translation in space. Taking g equal to angular momentum, g = r i p j − p i r j , the transformation becomes R i = r i − εr j ,
P i = p i − εp j ,
(3.14)
which is an infinitesimal rotation. Finally, taking g equal to the Galilean booster, g = mr i − tp i , we get R i = r i − εt , P i = p i − εm , (3.15) which is a Galilean boost with respect to velocity ε. Momentum, angular momentum and Galilean booster thus generate infinitesimal translation, rotation and Galilean transformation respectively. Assume now that a generator g is also conserved by the Hamiltonian system, 0 = ġ = {g, h} .
(3.16)
Evolution equations of the transformed variables are then (note the use of the Jacobi identity) Ṙ i = {R i , h} = {r i , h} + ε{{r i , g}, h} = r i̇ − ε ({{g, h}, r i } + {{h, r i }, g}) = r i̇ + ε{r ̇i , g} ̇ P i = {P i , h} = {p i , h} + ε{{p i , g}, h}
(3.17a)
= ṗ i − ε ({{g, h}, p i } + {{h, p i }, g}) = ṗ i + ε{ṗ i , g} ,
2 Note that the last step works only for the canonical Poisson bracket.
(3.17b)
3.1 Classical mechanics | 57
and they are therefore just the infinitesimal transformations (generated by symmetry g) of the original evolution equations. We obtain this analogue of Noether’s theorem in Hamiltonian mechanics: Assume that a canonical Hamiltonian system has a conserved quantity g(t, r, p). The conserved quantity then generates an infinitesimal canonical transformation, and evolution equations of the transformed variables R and P are just the infinitesimal transformations of the Hamilton canonical equations for r and p. In particular, if momentum is conserved, the system is symmetric with respect to spatial translations. If angular momentum is conserved, the system is symmetric with respect to rotations, and if the Galilean booster is conserved, the system is symmetric with respect to Galilean transformations. All these concepts of infinitesimal transformation, i.e., symmetries of evolution differential equations (conservation laws) and the concept of canonical coordinates, are directly borrowed from the very nice tool of symmetries in differential equations enabling analytical insights, solutions (in fact, this is exactly what symbolic packages like Mathematica or Maple use to solve differential equations symbolically), selfsimilar solutions, etc. We refer the interested reader to an intelligible introductory text for ordinary differential equations [23] and [24] for extension into partial differential equations. EXERCISE: Symmetries – Verify symmetry with respect to translation for the Hamiltonian of a free particle and for interacting particles. – Verify the formula for infinitesimal rotation. – Verify Galilean booster conservation for a free particle.
3.1.5 Summary The motion of a system of classical particles can be described by means of Hamilton canonical equations. Hamilton canonical equations can be seen as a consequence of the canonical Poisson bracket and of the choice of a Hamiltonian function, which plays the role of energy. Besides the evolution equations of positions and momenta of the particles, the Hamiltonian formulation of mechanics makes it possible to discuss symmetries of the motion and to generate the motion by minimization of an action functional (variational principle). The formulation of particle dynamics by means of Hamiltonian mechanics provides new insight into the dynamics. Although one could always describe a nonquantum system as a system of classical particles, evolution of which is governed by Hamilton canonical equations, it is hopeless to try to solve the equations without relying on demanding numerical computer solvers. And even when using powerful numerical solvers, one is usually constrained
58 | 3 Hamiltonian mechanics
to much less than one mole of particles and simulation times just tiny fractions of one second. Direct solution of Hamilton canonical equations is obviously impractical when simulating real sized systems out of equilibrium for macroscopically interesting times. In order to gain more insight into evolution of a physical system, it is advantageous not to see all the details (we are usually not interested in them anyway) but to choose a less detailed set of state variables than positions and momenta of all particles, for example the field of density ρ(t, r) and momentum density u(t, r) as in hydrodynamics. The purpose of the following sections is to establish tools that will make it possible to formulate mechanics of a general system of state variables in the Hamiltonian way.
3.2 General Hamiltonian evolution Let a general set of state variables be denoted by x. What is the Hamiltonian mechanics of the state variables? The main purpose of this section is to answer that question. Moreover, we will recall several concepts from differential geometry that will become useful later.
3.2.1 Poisson bracket Hamiltonian evolution of some state variables x is expressed by means of a Poisson bivector and energy as in the case of classical mechanics. The Poisson bivector is a matrix L ij that generates evolution of state variables x, ẋ i = ∑ L ij E x j .
(3.18)
j
The Poisson bivector is given for classical mechanics by Equation (3.2d), but when the state variables are different than in classical mechanics, the bivector is also different because the state variables then have different kinematics. Our goal is to show how to derive such kinematics. If the state variables consist of field variables, Equation (3.18) needs to be interpreted in a slightly different sense than in the case of classical mechanics. The time derivative is interpreted as partial time derivative ∂/∂t. Components of the state variables, e.g., x i , are interpreted as values of the particular fields at particular points in space r. Summation over an index is interpreted as a scalar product, typically integral over space (L2 -scalar product). Finally, derivatives with respect to state variables are interpreted as functional derivatives; see Appendix A.2. To see a proper more general definition of a Poisson bivector and its relation to a Poisson bracket and evolution equations we refer the reader to A.5.
3.2 General Hamiltonian evolution
|
59
Fig. 3.1: Poisson brackets are an essential ingredient when preparing evolution equations on a level of description
The Poisson bivector is an antisymmetric twice contravariant tensor field, which is the reason for the name ‘bivector’. It is often easier to work with the bilinear antisymmetric operation constructed from the bivector, {A, B} = ∑ A x i L ij B x j
∀A(x) and B(x) ,
(3.19)
ij
where A(x) and B(x) are two functions (or functionals) of the state variables x. This antisymmetric bilinear operation {∙, ∙} is called a Poisson bracket, see Figure 3.1. Plugging x i and x j into the Poisson bracket, we obtain {x i , x j } = L ij .
(3.20)
Knowledge of the Poisson bracket is thus equivalent to the knowledge of the Poisson bivector. Taking a functional of the state variables A(x), Hamiltonian evolution of the functional is given by (3.21) Ȧ = ∑ A x i ẋ i = ∑ A x i L ij E x j = {A, E} . i
ij
Poisson brackets are thus natural instruments for expressing Hamiltonian evolution of functionals of state variables. Note that if a functional depends explicitly on time, its evolution is given by ∂A Ȧ = + {A, E} . ∂t
(3.22)
Taking for instance energy dependent only on the state of the system E(x), its Hamiltonian evolution is Ė = {E, E} = −{E, E} = 0 (3.23) due to the antisymmetry. Energy that does not depend explicitly on time is conserved by Hamiltonian evolution automatically. In this book, the functionals will never explicitly depend on time unless noted otherwise. Apart from conservation of energy, which is satisfied automatically, the Poisson bracket is required to be degenerate in the sense that entropy and total mass are Casimirs of the bracket, i.e., {S, F} = 0 and {M, F} = 0 ∀F .
(3.24)
Once we have a Poisson bracket and energy, how do we find the evolution equations? There are two equivalent ways:
60 | 3 Hamiltonian mechanics
1.
We can plug a state variable x i into the Poisson bracket, ẋ i = {x i , E} = L ij E x j ,
2.
(3.25)
which gives the evolution equation. The Poisson bracket for an arbitrary functional {A, E} can be rewritten into the form {A, E} = A x i L ij E x j , (3.26) which makes it possible to read the evolution equation for x i , given by all the terms that multiply A x i . This way is often faster than the first one. Note also that the multiplication is often represented by integration over space and thus it is often necessary to perform integration by parts³ to cast the Poisson bracket into the desired form (A x i multiplied by the right hand side of the evolution equation).
Let us sum up the properties all Poisson brackets must fulfill for all functionals A, B and C. Besides the antisymmetry, {A, B} = −{B, A} ,
(3.27a)
Poisson brackets fulfill also the Leibniz rule {A, BC} = A{B, C} + {A, C}B ,
(3.27b)
{A, {B, C}} + {B, {C, A}} + {C, {A, B}} = 0 .
(3.27c)
and Jacobi identity (3.5),
The Leibniz rule is valid due to the presence of derivatives in the Poisson bracket. The Jacobi identity means, roughly speaking, that the evolution equations keep their structure in time, and it has to be checked for each Poisson bracket separately. We will return to this property later. Additionally, the Jacobi identity together with the antisymmetric property implies ̇ {A, B} = {{A, B}, E} = −{E, {A, B}} = {A, {B, E}} + {B, {E, A}} = {A, B}̇ + { A,̇ B} . (3.28) A Poisson bracket is a bilinear antisymmetric mapping between functionals of state variables that satisfies the Leibniz rule and the Jacobi identity. At this point we recommend the reader to go through Appendix A.5 to understand and master the Poisson bracket, bivector and evolution equations in a general setting.
3 This is a slight abuse of notation as it is merely a definition of derivative of a generalized function. In the special case, however, of regular distributions this differentiation acts exactly as integration by parts while dropping the boundary terms.
3.2 General Hamiltonian evolution
|
61
3.2.2 Hamiltonian vector field Hamiltonian evolution can also be seen from the perspective of differential geometry. A beautiful introduction into differential geometry and Lie groups can be found in [25]. Consider a level of description with state variables x. A particular state, a particular set of state variables, can be regarded as a position within a manifold 𝕄 of state variables. Such manifolds in this book are typically also vector spaces, so those who are not familiar with the concept of manifolds can approximate the word as a vector space. Consider a function F(x) on the manifold, which is an element of the space of all smooth functions on the manifold F(𝕄). A vector field on the manifold has several interpretations. It can be seen as a linear mapping X from F(𝕄) to F(𝕄) satisfying the Leibniz rule X(F ⋅ G) = X(F)G + FX(G) .
(3.29)
For instance, derivative ∂/∂x i is a vector field. In fact, a set of all first order partial derivatives with respect to spatial coordinates form a basis of the space of vector fields, and every vector field can thus be expressed as X = Xi
∂ . ∂x i
(3.30)
Action of the vector field on a function F is then X(F) = X i
∂F ∂F = X(x i ) i . ∂x i ∂x
(3.31)
The latter equality follows from choosing F = x i as the components of the vector fields with respect to the coordinate basis, X i = X(x i ). The basis formed of vector fields ∂/∂x i is called the coordinate basis. Another interpretation of a vector field on the manifold is that to each point of the manifold is attached an arrow indicating direction and velocity of motion at that point. The arrows are in fact elements of tangent planes to the manifold (all of which compose the tangent bundle). The vector field can be thus seen as a mapping from the manifold to the tangent bundle. Starting at one point, one could ‘follow the arrows’, which is motion along the vector field with velocity ẋ i = X i ,
(3.32)
where the dot represents derivative with respect to a parameter, which is not necessarily physical time. Change of a function F(x) due to the motion along the vector field is then given by ∂F i Ḟ = X = X(F) , (3.33) ∂x i from where the equivalence with the preceding interpretation (Equation (3.31)) follows.
62 | 3 Hamiltonian mechanics
Having recalled the concept of vector fields, we are now in position to see the Hamiltonian vector field generating Hamiltonian evolution. The right hand side of equation (3.18) represents components of the vector field, ∂ X E = ∑ L ij E x j . i ∂x j ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(3.34)
def
= X Ei
By comparing expressions for components of the Hamiltonian vector field and the equation for Hamiltonian evolution of a general functional of state variables, Equation (3.21), we can see that the Hamiltonian vector field generates Hamiltonian evolution of a functional, Ȧ = {A, E} = XE (A) . (3.35) Vector field X E is the Hamiltonian vector field generated by energy E, and its action on functionals of state variables is expressed by the Poisson bracket. Vector fields can also be seen as generators of curves on the manifold. The curves are defined as solutions x(t) to Equation (3.32), which are generated by motion along the vector field. A shift along the curves ϕ τ : x(t) → x(t + τ) maps points from the curves to later (by parameter τ) points of the same curves. When the curves are generated by a vector field X, mapping ϕ(τ) := ϕ τ is called flow of the vector field. In particular, time derivative of the flow is dϕ τ =X. (3.36) dτ τ=0 Vector field X can then be seen as the system of tangent vectors to the curves.
3.2.3 Tensor fields Besides vector fields (also called contravariant fields) on manifold 𝕄, we can also introduce the fields of covectors (covariant fields or differential forms) on the manifold, which are dual to the vector fields at each point of the manifold. The duality is represented by means of a scalar product ⟨∙, ∙⟩, which takes a vector field X and a covector field θ and gives a number at each point of the manifold, i.e., a function on 𝕄, ⟨X, θ⟩ ∈ F(M) .
(3.37)
Vector fields ∂/∂x i form a base of the space vector fields on 𝕄. The dual base to this base is denoted by dx i , and the duality is expressed through ⟨
∂ j , dx j ⟩ = δ i , ∂x i
(3.38)
3.2 General Hamiltonian evolution
| 63
so that the product is zero unless the two base vector fields correspond to the same x i . An arbitrary covector field can then be expressed in the coordinate basis as θ = θ i dx i .
(3.39)
The scalar product can then be rewritten as j
⟨X, θ⟩ = X i δ i θ j = X i θ i .
(3.40)
More generally, tensor fields T of arbitrarily contravariant or covariant degree can be defined by taking tensor products of vectors and covectors, ijk...
T(x) = T lmn...
∂ ∂ ∂ ⊗ ⊗ ⊗ ⋅ ⋅ ⋅ ⊗ dx l ⊗ dx m ⊗ dx n ⊗ . . . . ∂x i ∂x j ∂x k
(3.41)
See [25] for more details.
3.2.4 Lie derivative The flow ϕ of the vector field X, which generates shifts by τ along the curves, can shift in both directions (by positive or negative τ). Therefore, mapping ϕ−τ maps x(t + τ) to x(t). We can then introduce a new mapping of tensor fields T ϕ∗τ T(x) = T(ϕ τ (x)) .
(3.42)
This new mapping is called the pull-back generated by the flow ϕ. The name ‘pullback’ in differential geometry refers to a mapping between two manifolds 𝕄 → ℕ, which then allows a function on the latter manifold ℕ to be evaluated at the former manifold 𝕄, thence pulling it back. In our case, the manifold ℕ corresponds to x(t) while 𝕄 to x(t−τ) with a mapping ϕ τ connecting the two. Finally, the definition above indeed corresponds to a pull-back mapping of a tensor field (acting on ℕ) to the tensor field pulled back in time (acting on 𝕄). We are now in a position to define a Lie derivative of a tensor field T with respect to a vector field X, d ∗ LX T = (3.43) ϕ T . dτ τ=0 τ The Lie derivative is sometimes called the fisherman’s derivative, since it tells us how a quantity changes along the flow, e.g., how a leaf is advected by the flow of a river; see [26]. Consider now a function F(x) on 𝕄. The Lie derivative of F with respect to the field X then becomes d ∂F i F(ϕ τ ) = LX F = X = X(F) . (3.44) dτ τ=0 ∂x i
64 | 3 Hamiltonian mechanics
The Lie derivative of a function with respect to vector field X is thus equal to the action of the field on the function. For example the Hamiltonian evolution, Equation (3.35), can be rewritten as Ȧ = LXE A . (3.45) Hamiltonian evolution of a functional is the Lie derivative of the functional with respect to the Hamiltonian vector field, LXE . The Lie derivative of a tensor product satisfies the Leibniz rule (due to the derivative in its definition), LX T1 ⊗ T2 = LX T1 ⊗ T2 + T1 ⊗ LX T2 .
(3.46)
The following properties of Lie derivatives will be presented without proof, and we recommend consulting [25]. The Lie derivative of a scalar product works as LX ⟨Y, θ⟩ = ⟨LX Y, θ⟩ + ⟨Y, LX θ⟩ .
(3.47)
The Lie derivative of a vector field is LX Y = [X, Y] = (X j
i ∂Y i ∂ j ∂X − Y ) , ∂x j ∂x j ∂x i
(3.48)
and the Lie derivative of a covector field is LX θ = (X j
∂θ i ∂X j + θ j ) dx i . ∂x j ∂x i
(3.49)
3.2.5 Tangent and cotangent bundles Consider a manifold (a set for which coordinates can be introduced locally everywhere) and let a position on the manifold be described by r. Then evolution of a point within the manifold is given by a certain curve r(t), and tangent to that curve is the vector field of velocities r.̇ At each point r there is a vector ṙ expressing velocity of that point, i.e., there is a vector field on the manifold. Each of the vectors belongs to a plane tangent to the manifold at the corresponding point of the manifold. The colleċ is called the tangent bundle T𝕄 of tion of all these planes (e.g., with elements (r, r)) manifold 𝕄. Instead of velocity at each point of the manifold we can talk about momentum, which is related to velocity through the Hamilton canonical equation ṙ = Hp . If ṙ is a contravariant vector (one upper index), Hp is also contravariant, which means that p is a covariant vector (a one-form), an element of the dual space to the tangent plane at r ∈ 𝕄. The collection of all dual spaces to the tangent planes (e.g., with elements (r, p)) is called the cotangent bundle T ∗ 𝕄 of manifold 𝕄. The canonical Poisson bracket thus takes two functionals on the cotangent bundle. The cotangent bundle plays an important role in Hamiltonian mechanics.
3.2 General Hamiltonian evolution
| 65
3.2.6 Conserved quantities A quantity q is conserved if it does not evolve in time, i.e., 0 = q̇ = {q, H} = L H q ,
(3.50)
where H denotes the Hamiltonian. In other words, the quantity is conserved if its Lie derivative with respect to the Hamiltonian vector field is zero. Having two conserved quantities q1 and q2 , their Poisson bracket is also a conserved quantity. Indeed, from the above mentioned consequence of the Jacobi identity (3.28) it follows that {{q1 , q2 }, h} = −{{q2 , h}, q1 } − {{h, q1 }, q2 } = 0 .
(3.51)
New conserved quantities can be thus obtained as Poisson brackets of already known conserved quantities.
3.2.7 Lie algebra and Lie groups A vector space V equipped with a bilinear mapping [V, V] → V such that [a, b] = −[b, a] ∀a, b ∈ V
(antisymmetry)
0 = [a, [b, c]] + [b, [c, a]] + [c, [a, b]]
∀a, b, c ∈ V
(3.52a) (Jacobi identity) ,
(3.52b)
is called a Lie algebra. The bilinear mapping [∙, ∙] is called a Lie bracket. For example, vectors in ℝ3 equipped with the cross product form a Lie algebra. Conserved quantities of a Hamiltonian system also form a Lie algebra. EXERCISE: Lie algebra on ℝ3 Verify that the space ℝ3 with the cross product [X, Y]i = (X × Y)i = ε ijk X j Y k forms a Lie algebra.
EXERCISE: Lie algebra of conservation laws Verify that conserved quantities of Hamiltonian evolution form a Lie algebra.
Lie algebras are very useful when regarding motion from the geometrical point of view. But before showing the connection between Lie algebras and motion, we have to recall the concept of Lie groups. A Lie group G is a manifold equipped with a smooth operation of multiplication (∙, ∙) : G × G → G . (3.53)
66 | 3 Hamiltonian mechanics For each element g ∈ G exists an inverse element g−1 ∈ G such that (g, g−1 ) = e, e being the unit element of the group satisfying (e, g) = g for each g ∈ G. For instance, the states of rotation of a rigid body with the operation of multiplication given by composition of the rotations form a Lie group. Let us now return to the geometrical description of motion. Motion can be interpreted as following arrows attached to points of a configuration manifold 𝕄, where by arrows we mean the right hand side of an evolution equation. The right hand side of the evolution equation can be thus seen as a vector field (mapping from a configuration manifold 𝕄 to the tangent bundle of the manifold T𝕄), and motion can be thus seen as following the arrows of the vector field. For instance, the right hand side of Hamiltonian evolution equations is the Hamiltonian vector generated by energy E (or Hamiltonian H). Once an initial position is specified, future states are given by following the arrows (elements of the tangent bundle). When the configuration manifold 𝕄 (e.g., positions of a particle or states of rotation of a rigid body) is also a Lie group G, it is equipped with a group multiplication operation (g, h) → k ∈ G. Choosing an element g of the Lie group (or the manifold), one can define the left translation of the group L g (h) = (g, h) ∀h ∈ G, which maps any element h to (g, h). A vector field X is said to be left-invariant if the pull-back L∗g X = X keeps the field intact for any g, which means that the vector field is compatible with the left translations of the group. Such fields are uniquely specified by their values at the unit element X|e , since the translation can always map the value at the unit element to any another element of the manifold (p. 216 of [25]). Left-invariant vector fields (or the analogously defined right-invariant vector fields) form a distinguished class of vector fields on the manifold due to their compatibility with the Lie group structure of the manifold. The commutator of vector fields is defined as [V, W](f) = V(W(f)) − W(V(f)) = (V i
j ∂W j ∂f i ∂V − W ) ∂x i ∂x i ∂x j
(3.54)
for any function f on the manifold 𝕄. When the fields V and W are left-invariant, then their commutator is a left-invariant vector field as well (p. 222 of [25]). Therefore, the left-invariant vector fields form the Lie algebra g of group G where the Lie bracket is the commutator. Since the left-invariant vector fields are equivalent with their values at the unit element of the group, the Lie algebra g is the tangent space attached to the unit element of the group T e 𝕄 and is thus a vector space. The group G was equipped with the multiplication, which generated the translations L g . Similarly, the Lie algebra g is equipped with a Lie bracket (not necessarily the commutator), which thus also generates an action of the Lie algebra on itself, the adjoint action, defined by adX Y = [X, Y] , (3.55) [∙, ∙] being the Lie bracket. The adjoint action maps elements of the Lie algebra to other elements of the Lie algebra.
3.2 General Hamiltonian evolution
| 67
3.2.8 Lie algebra dual and Lie–Poisson bracket Because the Lie algebra g of group G is also a vector space, we can construct the dual space, the Lie algebra dual g∗ , with a duality operation ⟨X, μ⟩ → ℝ ∀X ∈ g and
μ ∈ g∗ .
(3.56)
The Lie algebra was endowed with the adjoint action, and the Lie algebra dual is thus also equipped with the dual coadjoint action ad∗ : g × g∗ → g∗ , defined so that ⟨ad∗X μ, Y⟩ = −⟨μ, adX Y⟩ ∀Y ∈ g .
(3.57)
Since vector fields (as the elements of the Lie algebra) map functions on 𝕄 to other functions on the manifold, functions on 𝕄 can be seen as elements of the Lie algebra dual (linear mappings turning vector fields to functions). Hamiltonian evolution, e.g., Equation (3.21), can be seen as a prescription for evolution of functions on 𝕄. What is the Hamiltonian evolution of elements of the Lie algebra dual g∗ ? Taking elements of the Lie algebra dual as state variables μ ∈ g∗ , derivatives of a Hamiltonian (or energy) with respect to the state variables can be seen as elements of the Lie algebra, which is the dual space to g∗ due to assumed reflexivity of the spaces, H μ ∈ g. A concrete example of this identification is shown in Section 3.3. The coadjoint action then generates motion μ̇ = ad∗H μ μ , (3.58) which can be rewritten as ̇ = ⟨F μ , ad∗ μ⟩ = −⟨μ, adF H μ ⟩ = −⟨μ, [F μ , H μ ]⟩ . Fμ μ Hμ
(3.59)
The right hand side is called the Lie–Poisson bracket acting on functionals on the Lie algebra dual, def
{F, H}(LP) = −⟨μ, [F μ , H μ ]⟩ .
(3.60)
The Lie–Poisson bracket is automatically also a Poisson bracket (Section 14.7 of [25]). In contrast with the canonical Poisson bracket (3.3), the Lie–Poisson brackets are typically degenerate as they admit distinguished functionals S such that {S, G} = 0 ∀G, called Casimirs. Lie–Poisson brackets play an important role in physics, since the Liouville–Poisson bracket (3.87) or the Boltzmann Poisson bracket (3.99) are in fact Lie–Poisson brackets on the respective Lie algebra duals [27]. Another example where the Lie–Poisson bracket generates evolution is the rigid body rotation in Section 3.3. In summary, each Lie group G is equipped with its Lie algebra g and Lie algebra dual g∗ . There is a natural Hamiltonian structure on the Lie algebra dual – the Lie–Poisson bracket (3.60). This bracket is degenerate as it admits Casimir functions, which will play the role of entropy. The Lie–Poisson bracket generates the Hamiltonian evolution within the Lie algebra dual.
68 | 3 Hamiltonian mechanics
3.2.9 Jacobi identity Consider functionals A , B, C, C(t) = {A(t), B(t)} all with a parameter t. Assuming that the form of relation for C at the parameter value t holds also after a small change in this parameter value, we can write C(t + dt) = {A(t + dt), B(t + dt)} ̇ dt, B(t) + B(t) ̇ d t} + O(dt)2 = {A(t) + A(t) ̇ ̇ = {A(t), B(t)} + dt ⋅ ({ A(t), B(t)} + {A(t), B(t)}) + O(dt)2 .
(3.61)
On the other hand, we have Ȧ = {A, E} ,
Ḃ = {B, E} ,
Ċ = {C, E} ,
(3.62a)
and thus C(t + dt) = C(t) + Ċ dt + O(dt)2 = {A, B} + dt{{A, B}, E} + O(dt)2 ,
(3.62b)
which is valid for any choice of energy E. By comparing with Equation (3.61) we obtain that {{A, E}, B} + {A, {B, E}} = {{A, B}, E} , ∀A, B, E , (3.63) which can be rewritten (by using antisymmetry of the bracket) as the Jacobi identity (3.5) for functionals A, B and E. The natural assumption that the Poisson bracket remains the same during the Hamiltonian evolution is expressed as the Jacobi identity. From a more geometric perspective, the Jacobi identity means that the Lie derivative of the Poisson bivector with respect to the Hamiltonian vector field is zero, LX E L = 0 ,
XE = L ⋅ Ex ;
(3.64)
see [25]. This is the exact meaning of the Poisson bracket remaining the same during the reversible evolution. The Jacobi identity expresses self-consistency of the reversible evolution, and it plays a crucial role when looking for new Poisson brackets expressing kinematics of new state variables. We will demonstrate this in Section 3.8.3 with the example of the distortion matrix.
3.2.10 Summary In summary, Hamiltonian evolution of a general set of state variables is constructed by means of a Poisson bivector as in Equation (3.18). From the Poisson bivector a Poisson bracket can be constructed, which is an antisymmetric bilinear mapping taking two functionals of state variables and returning another functional, and it fulfills the
3.3 Dynamics of a rigid body
| 69
Jacobi identity. Hamiltonian evolution of an arbitrary functional is governed by the Poisson bracket and energy, which thus form the two building blocks of the reversible evolution equations. The Poisson bracket is the same for each physical system described by the same set of state variables while energy is specific for each system. When the manifold of state variables 𝕄 is also a Lie group, Hamiltonian evolution within the corresponding Lie algebra dual is generated by the Lie–Poisson bracket (3.60)
3.3 Dynamics of a rigid body Consider a rotating rigid body. The manifold of all possible states is the Lie group SO(3) of rotations in three dimensional space. The Lie algebra associated with this Lie group (tangent space at the unit element) consists of the infinitesimal rotation matrices, and its dimension is also three. Let the basis of the Lie algebra be chosen as (Li )jk = −ε ijk ,
(3.65)
i.e., 0 L1 = (0 0
0 0 1
0 −1) , 0
0 L2 = ( 0 −1
0 0 0
1 0) , 0
0 and L3 = (1 0
−1 0 0
0 0) . (3.66) 0
Any element of the Lie algebra can then be expressed as X = X i Li . Commutators between elements of the basis are then [L1 , L2 ] = L1 ⋅ L2 − L2 ⋅ L1 = L3
(3.67a)
[L2 , L3 ] = L2 ⋅ L3 − L3 ⋅ L2 = L1
(3.67b)
[L3 , L1 ] = L3 ⋅ L1 − L1 ⋅ L3 = L2 ,
(3.67c)
which means that the Lie bracket of elements of the Lie algebra can be rewritten as [X, Y] = X i [Li , Lj ]Y j = ε ijk X i Y j Lk = X × Y ,
(3.68)
where X and Y in the last expression are interpreted as vectors in ℝ3 with components X i of elements X with respect to basis (3.65). The Lie algebra g of group SO(3) can be represented by vectors in ℝ3 (components of X) equipped with the cross product. The dual space to ℝ3 is again ℝ3 and thus the Lie algebra dual g∗ can also be represented by vectors in ℝ3 . Evolution of functionals on the dual, F(m), m ∈ g∗ , is given by the Lie–Poisson bracket (3.59) ∂F ∂H def = {F, H}(SO(3)) , Ḟ = −m i ε ijk ∂m j ∂m k
(3.69)
70 | 3 Hamiltonian mechanics
where H(m) is a yet unspecified Hamiltonian (or energy). The right hand side is the Lie–Poisson bracket of functionals F and H. Evolution of functional F can be rewritten as ∂F ṁ j , (3.70) Ḟ = ∂m j and by comparing with Equation (3.69) we obtain the reversible evolution equation of m ṁ j = −ε ijk m i H m k , or ṁ = m × Hm . (3.71) The simplest quadratic choice of the Hamiltonian is H=
1 m21 m22 m23 + + ) , ( 2 I1 I2 I3
I1 ≥ I2 ≥ I3 .
(3.72)
Let us now proceed to physical interpretation of this dynamic. When m = (0, 0, m3 ), the corresponding rotation matrix L3 expresses infinitesimal rotation about the 3-axis. The component m3 thus expresses rotation with respect to that axis. The element of the Lie algebra expressing the rotation is then X = Hm =
m3 L3 . I3
(3.73)
The corresponding infinitesimal rotation is cos(dφ) ( sin(dφ) 0
− sin(dφ) cos(dφ) 0
0 1 0) ≈ (dφ 1 0
− dφ 1 0
1 0 0) = (0 1 0
0 1 0
0 ̇ 3 dt , (3.74) 0) + φL 1
from which we obtain for the angular velocity Ω = φ̇ that Ω = H m3 =
m3 . I3
(3.75)
The component m3 is thus a component of the angular momentum vector seen from the body. Indeed, the interpretation of angular velocity as Ω=
∂H ∂m
(3.76)
turns evolution equation (3.71) into ṁ = −Ω × m ,
(3.77)
which is the transformation from the laboratory frame to the frame attached to the rigid body (see e.g., [28], p. 97). Elements of the Lie algebra dual m thus represent angular momentum seen from the reference frame attached to the body, and the derivative of energy with respect to m is the angular velocity of rotation. Taking energy (3.72), evolution equation (3.71) turns into the equations for Euler angles [28]. Evolution equation (3.71) and energy (3.72) fully express dynamics of rigid body rotation with I1 , I2 and I3 being the moments of inertia of the principal axes of the body.
3.4 Liouville equation | 71
Consider a function of the magnitude of m, S(|m|). Evolution of such a function is then ∂S m j H mk = 0 , (3.78) Ṡ = {S, H}(SO(3)) = −m i ε ijk ∂|m| |m| which is zero for any choice of energy due to the simultaneous symmetry and antisymmetry with respect to swapping i ↔ j. Bracket (3.69) thus has Casimir functions S(|m|), which are conserved regardless the choice of energy. This means that the angular momentum seen from the body does not change its magnitude although it can change its direction, and that functions S(|m|) can be interpreted as the part entropy of the rigid body related to the rotation. Stability of this Hamiltonian evolution can be studied for instance by the EnergyCasimir method [29], which shows that rotations around the axis with lowest (I3 ) and highest (I1 ) inertia are stable while rotation around the axis with the middle inertia (I2 ) is unstable. However, energy of the rotation (3.72) or its Helmholtz free energy F = H − TS is lower for m = (|m|, 0, 0) than for m = (0, 0, |m|) (assuming the temperature of the body be constant). The body has lower free energy when rotating around the axis with highest inertia than when rotating around the axis with lowest inertia. When the body is in contact with an external medium keeping it isothermal, it is subject to external influences (or fluctuations), and the state of rotation can be slightly altered. According to Section 2.6.2, the free energy will decrease, which makes the rotation around the axis with highest inertia the only stable state in reality; see [5]. In summary, we have started with rotations of a rigid body, construction of the Lie algebra (arrows along which motion proceeds), and the Lie algebra dual. An element of the Lie algebra dual m physically represents the angular momentum seen from the reference frame attached to the body. More geometrical details can be found in [25] or [30].
3.4 Liouville equation In Section 3.2 we recalled how motion of one particle can be described by means of Hamiltonian mechanics. Kinematics of the particle is expressed by a Poisson bracket (3.3). When energy of the particle (or the Hamiltonian function) is supplied, evolution equations are recovered after the energy is plugged into the Poisson bracket. Let us now consider a system of N particles. Kinematics is again given by bracket (3.3), more precisely by summing brackets for each particle, N
{A, B}(CM(N)) = ∑ {A, B}(CM)α
(3.79a)
α=1
with {A, B}(CM)α = Arα ⋅ Bpα − Brα ⋅ Apα .
(3.79b)
72 | 3 Hamiltonian mechanics Position and momentum of particle one, (r1 , p1 ), is denoted by 1 and analogously for other particles. Poisson bracket (3.79a) expresses kinematics of a system of N particles. When the bracket is supplied with a Hamiltonian function (energy), evolution equations can be recovered as in Section 3.2. The equations are then the canonical Hamilton equations (3.2d), where for each particle one set of the equations is ṙ α = H p α
(3.80a)
ṗ α = −Hqα .
(3.80b)
Finally, evolution of functions of positions and momenta of the N particles is given by ̇ a(1, . . . , N) = {a, H}(CM(N)) ,
(3.81)
where H(1, . . . , N) is the total Hamiltonian. Instead of describing the N-particle system by means of position and momentum of each particle, we can choose to describe it by an N-particle distribution function f N (t, 1, . . . , N), which is a function of time and coordinates of the particles and which can be interpreted as the probability that the system of particles is at the coordinates (1, . . . , N). What is the Poisson bracket expressing kinematics of the distribution function? Let us first turn to the question of how energy and other functionals are constructed from the distribution function. Energy of the N-particle system, which is the classical analogue of E = ∑i p i E i , reads E(f N ) =
1 ∫ d1⋅ ⋅ ⋅ ∫ dN h3N f N (1, . . . , N)H(1, . . . , N) , N!h3N
(3.82)
and a general linear functional of f N , analogous to A = ∑i p i A i , can be expressed as A(f N ) =
1 ∫ d1⋅ ⋅ ⋅ ∫ dN h3N f N (1, . . . , N)a(1, . . . , N) , N!h3N
(3.83)
where a is an arbitrary function of the coordinates. Both a and H are assumed to be symmetric with respect to permutations because of the indistinguishability of the particles. The N-particle distribution function itself is thus also symmetric with respect to all permutations of the particles. The evolution of f N will be generated by a Poisson bracket and it is sufficient to specify how the Poisson bracket acts on linear functionals of f N , because the bracket will then be determined uniquely. Indeed, the underlying Poisson bivector is already specified when action of the Poisson bracket on linear functionals is known due to the properties of the Poisson bracket; see e.g., L → {} in Appendix A.5. How do linear functionals (3.83) of f N evolve? So far, the N-particle distribution function has been considered simply as a function of time and all positions and momenta. Now we have to give the distribution function a more precise meaning by defining its evolution. We require that the evolution be compatible with the canonical Hamiltonian evolution of N particles in the sense of
3.4 Liouville equation | 73
Fig. 3.2: Commutative diagram defining evolution of f N . Starting with particles at time t, i.e., in the bottom left corner, the N-particle cotangent bundle, functional of the positions a(1, . . . , N), has a particular value. After a small period of time dt, during which the particles were evolving according the Hamilton canonical equations, the functional gains the value given by Equation (3.85a), and linear functional A(f N (t + dt) the value given by Equation (3.85b). That is the canonical route. On the Liouville route, which expresses the sought evolution of f N , only the distribution function itself evolves. Both routes should lead to the same result, which is the required compatibility of the kinematics of f N with the canonical Hamiltonian mechanics of particles
commutative diagram; Fig. 3.2. On one hand, evolution of such an arbitrarily chosen linear functional of f N is given by 1 ∫ d1⋅ ⋅ ⋅ ∫ dN a(1, . . . , N) (f N (t + dt) − f N (t)) N! ̇ N (t)) d t + O(dt)2 , = A(f
A(f N (t + dt)) − A(f N (t)) =
(3.84)
where we applied Equation (3.83) for both A(f N (t+dt) and A(f N (t)). On the other hand, once we have the functional a(1, . . . , N) of positions and momenta of all particles at time t, the value of the functional at time t + dt is given by the canonical N-particle Poisson bracket as a(1(t + dt), . . . , N(t + dt)) = a(1(t), . . . , N(t)) + {a, H}(CM(N)) dt ,
(3.85a)
which follows from (3.81) and where higher order terms O(dt)2 were neglected. By integration it follows that the functional A(f N ) at time t + dt is 1 ∫ d1⋅ ⋅ ⋅ ∫ dN a(1(t + dt), . . . , N(t + dt))f N (t, 1, . . . , N) N! 1 = ∫ d1⋅ ⋅ ⋅ ∫ dN a(1(t), . . . , N(t))f N (t, 1, . . . , N) N! 1 + ∫ d1⋅ ⋅ ⋅ ∫ dN {a, H}(CM(N)) f N (t, 1, . . . , N) dt , N!
A(f N (t + dt)) =
(3.85b)
where {a, H}(CM(N)) depends only on positions and momenta of the particles. By comparison to Equation (3.84), we obtain that evolution of functionals of the N-particle distribution function is given by Ȧ = {A, E}(L) ,
(3.86)
74 | 3 Hamiltonian mechanics
where the Liouville Poisson bracket is {A, B}(L) = N! ∫ d1⋅ ⋅ ⋅ ∫ dN f N (t, 1, . . . , N) {
δA δB (CM(N)) , } . δf N δf N
(3.87)
Note also that a = N!A f N and H = N!E f N , where functional derivatives are represented by subscripts for brevity (as in many other places in this book). The full meaning of A f N is thus δA/δf N . The Liouville Poisson bracket {∙, ∙}(L) expresses kinematics of the Nparticle distribution function. What is the evolution equation for f N generated by Poisson bracket (3.87) and an energy functional E? Looking at Equation (3.84), the evolution equation can be read when the bracket {A, E}(L) is cast into the form where the derivative A f N stands in front of all other terms as a prefactor. The bracket can be rewritten in this way after integration by parts (with respect to r and p). The boundary terms that in general appear after integration by parts (or application of the Green theorem), however, can be left out of consideration because we can always assume that the evolution takes place on a torus, where the evolution equations would surely be the same, or in a large enough system where all fields disappear sufficiently far away⁴. Therefore, we can write N
{A, E}(L) = N! ∑ ∫ d1⋅ ⋅ ⋅ ∫ dN f N ( α=1
∂A f N ∂E f N ∂E f N ∂A f N ⋅ − ⋅ ) ∂rα ∂pα ∂rα ∂pα
N
= N! ∑ ∫ d1⋅ ⋅ ⋅ ∫ dN A f N (− α=1
∂E f N ∂E f N ∂ ∂ ⋅ (f N )+ ⋅ (f N )) ∂rα ∂pα ∂pα ∂rα
N ∂f N ∂E f N ∂f N ∂E f N = ∫ d1⋅ ⋅ ⋅ ∫ dN A f N N! ∑ (− ⋅ + ⋅ ), ∂r ∂p ∂p ∂rα ⏟⏟ α α α=1 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟α⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ =
(3.88)
∂f N ∂t
from where we can read the evolution equation for f N , N ∂f N ∂f N ∂H ∂f N ∂H = ∑ (− ⋅ + ⋅ ); ∂t ∂rα ∂pα ∂pα ∂rα α=1
(3.89)
the Liouville equation. The Liouville Poisson bracket has a different structure than the Poisson bracket of classical mechanics (3.3), which is referred to also as the canonical Poisson bracket. The Liouville Poisson bracket is thus noncanonical. An essential difference between the two brackets is that the canonical Poisson bracket is nondegenerate, i.e., there is no nonzero functional a for which {a, H}(CM) = 0 for all Hamiltonians H. On the other hand, for example for real-valued functions of the distribution function, S(f N ) = ∫ d1 . . . dN η(f N ) ,
(3.90)
4 A gentle (and the last) reminder: this is a slight abuse of notation as it is merely a definition of derivative of a generalized function. In the special case, however, of regular distributions this differentiation acts exactly as integration by parts while dropping the boundary terms.
3.5 Projection of Poisson brackets | 75
η being a smooth function from ℝ to ℝ, lies in the kernel of the Liouville Poisson bracket, i.e., N
Ṡ = {S, E}(L) = N! ∑ ∫ d1⋅ ⋅ ⋅ ∫ dN f N ( α=1 N
= N! ∑ ∫ d1⋅ ⋅ ⋅ ∫ dN (− α=1 N α=1
∂rα
⋅
∂E f N ∂E f N ∂η f N − ⋅ ) ∂pα ∂rα ∂pα
∂η f N ∂E f N ∂E f N ∂η f N ⋅ + ⋅ ) ∂rα ∂pα ∂rα ∂pα
= N! ∑ ∫ d1⋅ ⋅ ⋅ ∫ dN (η f N =0
∂ηf N
∂2 E f N ∂2 E f N − η fN ) ∂rα ∂pα ∂pα ∂rα
∀E(f N )
(3.91)
noting η (f N )∂f N /∂rα = ∂η(f N )/∂rα . Such functions S are referred to as Casimirs of the Poisson bracket, and they play the role of entropy because entropy will be required not to be affected by the reversible part of evolution. The Liouville Poisson bracket is in fact the Lie–Poisson bracket (3.60) on the Lie algebra dual to the Lie group of canonical transformations of N-particle mechanics, see e.g., [27] and [31].
3.5 Projection of Poisson brackets Consider a level of description with state variables x and Poisson bracket ↑
{A, B} = A x i ↑L ij B x j ,
(3.92)
which expresses kinematics of state variables on this higher (more detailed) level. ↑{∙, ∙} is the higher Poisson bracket, constructed from the higher Poisson bivector ↑L. Let a less detailed level be equipped with state variables y related to x by a projection y = π(x) .
(3.93)
Is the kinematics of the lower state variables, y, also expressed by a Poisson bracket? Let us take two arbitrary functionals of the lower state variables ↓A(y) and ↓E(y), the latter of which will play the role of energy. These functionals naturally generate functionals of the higher variables through ↑A(x) = ↓A(π(x)) and ↑E(x) = ↓E(π(x)), and the evolution of ↓A(π(x)) is then given by the higher Poisson bracket as δπ a ↑ ij δπ b ↓ d ↑A ↑ ↑ ↑ L E yb . = { A, E} = ↑A x i ↑L ij↑E x j = ↓A y a ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ dt δx i δx j
(3.94)
= ↓L ab ↓L ab
lives only on the lower level, i.e., does not depend on x and If the expression for hence depends only on y, we have just obtained a Poisson bivector on the lower level. Indeed, the new bivector is antisymmetric and forms the lower Poisson bracket ↓↓
def
{ A, ↓B} = ↓A y a ↓L ab (y)↓B y b
∀↓A(y), ↓B(y) .
(3.95)
76 | 3 Hamiltonian mechanics
This bracket is a Poisson bracket, since it automatically obeys the Leibniz rule and the Jacobi identity. This Poisson bracket for the lower state variables (the lower Poisson bracket) expresses kinematics of the lower state variables implied by kinematics of the higher state variables, d ↓A ↓ ↓ ↓ = { A, E} dt
∀↓A, ↓E .
(3.96)
EXERCISE: Lower Jacobi identity Check that if the lower Poisson bracket can be constructed, i.e., ↓L ab does not depend on x, the bracket fulfills the Jacobi identity. Hint: Express ↓A(y) as ↓A(x) = ↓A(π(x)) and use the Jacobi identity for the higher bracket.
In summary, if the higher Poisson bracket evaluated on functionals ↓A(π(x)) and ↓B(π(x)) turns out to be independent on x (except for the dependence y = π(x)), we get a new (lower) Poisson bracket expressing kinematics of the lower variables, y. This is the method of projection of a Poisson bracket; the lower Poisson bracket is a projection of the higher bracket. This method will be employed frequently hereafter, e.g., when deriving the Boltzmann Poisson bracket from the Liouville Poisson bracket or when deriving the Poisson bracket of fluid mechanics from the Boltzmann Poisson bracket.
3.6 From Liouville to Boltzmann Poisson bracket Kinematics of the N-particle distribution function is generated by the Liouville Poisson bracket (3.87). Once energy is known as a function of f N , it can be plugged into the Poisson bracket, and the Liouville equation can be recovered. Suppose now that we do not wish to see the whole N-particle distribution function, but only the average one-particle distribution function given by projection (2.113). Having an arbitrary functional A(f) of the one-particle distribution function, its derivative with respect to f N is δA(f(r, p)) δA δf(r , p) = ∫ dr ∫ dp δf N (1, . . . , N) δf(r , p ) δf N (1, . . . , N) = ∫ dr ∫ dp =
∑N δA i=1 δ(i − (r , p )) δf(r , p ) N!
1 N δA ∑ . N! i=1 δf(i)
(3.97)
This expression together with the symmetry of f N with respect to permutations of particles will be used when plugging two arbitrary functionals A(f) and B(f) into the Liou-
3.6 From Liouville to Boltzmann Poisson bracket | 77
ville Poisson bracket (3.87), which leads to N
{A(f), B(f)}(L) = N! ∫ d1⋅ ⋅ ⋅ ∫ dN f N ∑ ( i=1
∂A f N ∂B f N ∂B f N ∂A f N ⋅ − ⋅ ) ∂ri ∂pi ∂ri ∂pi
=
N ∂A f(i) ∂B f(i) ∂B f(i) ∂A f(i) 1 ⋅ − ⋅ ) ∫ d1⋅ ⋅ ⋅ ∫ dN f N ∑ ( N! ∂ri ∂pi ∂ri ∂pi i=1
=
∂A f(1) ∂B f(1) ∂B f(1) ∂A f(1) N ⋅ − ⋅ ) ∫ d2⋅ ⋅ ⋅ ∫ dN f N ∫ d1 ( N! ∂r1 ∂p1 ∂r1 ∂p1 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ = (N−1)!f(1)
= ∫ d1 f(1) (
∂A f(1) ∂B f(1) ∂B f(1) ∂A f(1) ⋅ − ⋅ ) . ∂r1 ∂p1 ∂r1 ∂p1
(3.98)
This expression does not depend on f N , which means that we have obtained a new Poisson bracket by projection from the Liouville Poisson bracket in the sense of Section 3.5. Let us refer to the new Poisson bracket as the Boltzmann Poisson bracket {A, B}(B) = ∫ dr ∫ dp f(r, p) (
∂A f ∂B f ∂B f ∂A f ⋅ − ⋅ ) . ∂r ∂p ∂r ∂p
(3.99)
This Poisson bracket generates kinematics of the one-particle distribution function. Having energy E(f), the evolution equation for f can be read from the following calculation: ∂A f ∂E f ∂E f ∂A f − ) ∂r ∂p ∂r ∂p ∂E f ∂E f ∂ ∂ ⋅ (f = ∫ dr ∫ dp A f ((− ⋅ (f )+ ))) . ∂r ∂p ∂p ∂r
{A, E}(B) = ∫ dr ∫ dp f(r, p) (
(3.100)
Note the integration by parts and dropping the boundary terms. The evolution equation is then ∂E f ∂E f ∂f(t, r, p) ∂ ∂ = − ⋅ (f )+ ⋅ (f ) ∂t ∂r ∂p ∂p ∂r ∂f ∂E f ∂f ∂E f ⋅ + ⋅ . =− ∂r ∂p ∂p ∂r
(3.101)
This is the reversible evolution equation for the one-particle distribution function (i.e., the reversible part of the Boltzmann equation). Taking for example the mean-field energy p2 1 + ∫ d1 ∫ d2 f(1)V(r1 − r2 )f(2) , 2m 2
(3.102)
∂V(r − r ) ∂f(t, r, p) ∂f p ∂f =− ⋅ + ⋅ ∫ dr ∫ dp f(r , p ) , ∂t ∂r m ∂p ∂r
(3.103)
E(f) = ∫ dr ∫ dp f(r, p) Equation (3.101) becomes
78 | 3 Hamiltonian mechanics
which is usually called the Vlasov equation. The Vlasov equation can be thus seen as a consequence of the Hamiltonian mechanics expressing kinematics of the one-particle distribution function. Boltzmann entropy (2.120) expresses entropy of an ideal gas in terms of the oneparticle distribution function. As in the case of the Liouville equation, Equation (3.91), any entropy of form S(f) = ∫ dr ∫ dp η(f(r, p)) ,
(3.104)
where η is a smooth function from ℝ1 to ℝ1 , is a Casimir of Poisson bracket (3.99), {S, F}(B) = 0 ∀F(f). In particular, Boltzmann entropy (2.120) is a Casimir of the Boltzmann Poisson bracket. EXERCISE: Boltzmann entropy Verify that Boltzmann entropy (2.120) is a Casimir of Poisson bracket (3.99).
In summary, plugging functionals dependent only on the one-particle distribution function f into the Liouville Poisson bracket (3.87) leads to a Poisson bracket dependent only on f , called the Boltzmann Poisson bracket, Equation (3.99). The Boltzmann Poisson bracket implies an evolution equation for f , which has to be supplied with an energy functional E(f). Using for instance the mean-field energy (3.102), the evolution equation becomes the usual Vlasov equation.
3.7 Fluid mechanics 3.7.1 From Boltzmann to the Poisson bracket of fluid mechanics In Section 3.6 it was derived that kinematics of the one-particle distribution function f(r, p) is expressed by the Boltzmann Poisson bracket (3.99). The distribution function can be further projected to the fields used in fluid mechanics, namely density, momentum density, and entropy density ρ(r a ) = ∫ dr ∫ dp mf(r, p)δ(r − ra )
(3.105a)
u i (r a ) = ∫ dr ∫ dp p i f(r, p)δ(r − r a )
(3.105b)
s(r a ) = ∫ dr ∫ dp η(f(r, p))δ(r − r a ) ,
(3.105c)
where m is mass of one particle and entropy density η is a positive smooth real-valued function of the distribution function. Fields (3.105) are the state variables of fluid mechanics in the energetic representation, see Section 4.5 below for a definition. Is kinematics of these state variables governed by a Poisson bracket as well as the kinematics of the one-particle distribution function?
3.7 Fluid mechanics
| 79
To answer that question, we will first calculate a few expressions that will be used later. Derivatives of the state variables (ρ, u, s) with respect to f(r, p) are δρ(r a ) = mδ(r − r a ) , δf(r, p) δu i (r a ) = p i δ(r − r a ) and δf(r, p) δs(r a ) = η (f(r, p))δ(r − r a ) , δf(r, p)
(3.106a) (3.106b) (3.106c)
and derivative of a functional of the state variables A = A(ρ(r), u(r), s(r)) with respect to f(r, p) is then δA δA δρ(r ) = ∫ dr +... δf(r, p) δρ(r ) δf(r, p) = mA ρ + p i A u i + η A s .
(3.107)
Let us now try to calculate the projection of the Boltzmann Poisson bracket. Plugging Equation (3.107) into the Boltzmann Poisson bracket, (3.99), we obtain ∂ ∂ (mA ρ + p i A u i + η A s ) (mB ρ + p j B u j + η B s ) − . . . ) ∂p k ∂r k ∂A ρ ∂A u (3.108a) = ∫ dr ∫ dp f ((m k + p i k i ) B u k − . . . ) ∂r ∂r ∂η A s B uk − . . . ) (3.108b) + ∫ dr ∫ dp f ( ∂r k ∂A ρ ∂A u ∂ (η B s ) − . . . ) (3.108c) + ∫ dr ∫ dp f ((m k + p i k i ) ∂p k ∂r ∂r ∂ ∂ (B s η ) − . . . ) , (3.108d) + ∫ dr ∫ dp f ( k (A s η ) ∂p k ∂r
{A, B}(B) = ∫ dr ∫ dp f (
as the state variables of fluid mechanics are independent of p (and hence, e.g., ∂/∂p k (mB ρ ) = 0 or p j ∂/∂p k B u j = 0). The dots stand for the antisymmetric complement (i.e., the analogous expression with A and B swapped). Term (3.108a) can be rewritten as ∫ dr ∫ dp f ((m = ∫ dr [
∂A ρ ∂r k
∂A ρ ∂r k
+ pi
∂A u i ) B uk − . . . ) ∂r k
(∫ dp mf ) B u k + (∫ dp p i f ) ∂ k A u i B u k − . . . ]
= ∫ dr ρ(∂ k A ρ B u k − ∂ k B ρ A u k ) + u i (∂ k A u i B u k − ∂ k B u i A u k ) ,
(3.109a)
which will constitute the first two terms of the final Poisson bracket. Note that we used a shorthand notation ∂ k = ∂/∂r k and the partial derivative relates only to the immedi-
80 | 3 Hamiltonian mechanics
ately following term unless indicated otherwise with brackets. Term (3.108b) becomes − ∫ dr ∫ dp
∂B u k ∂f η A s B u k + ⋅ ⋅ ⋅ − ∫ dr ∫ dp fη A s +... ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂r k ∂r k =
∂η ∂r k
= ∫ dr s(∂ k A s B u k − ∂ k B s A u k ) + ∫ dr ∫ dp ηA s − ∫ dr ∫ dp fη A s
∂B u k −... ∂r k
∂B u k +... , ∂r k
(3.109b)
where the first term following the equality sign will be the last term of the final Poisson bracket. All the other terms will cancel with the remaining terms of (3.108). Term (3.108c) becomes − ∫ dr ∫ dp
∂A ρ ∂A u k ∂A u ∂f η B s (m k + p i k i ) + ⋅ ⋅ ⋅ − ∫ dr ∫ dp f η Bs + . . . ∂p k ∂r ∂r ∂r k ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂η ∂p k
= ∫ dr ∫ dp ηB s
∂A u k ∂A u k − ⋅ ⋅ ⋅ − ∫ dr ∫ dp f η Bs + . . . , k ∂r ∂r k (3.109c)
which cancels with the second and third term following the equality sign in (3.109b). Finally, term (3.108d) can be rewritten as ∫ dr ∫ dp f (
∂A s η ∂η ∂A s ∂η B − . . . ) = ∫ dr ∫ dp f B η −... s s ∂p k ∂p k ∂r k ∂r k ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ =
∂f ∂A s B s Σ + . . . ∂p k ∂r k ∂B s ∂Σ ∂A s ( Bs − k As ) = 0 , = − ∫ dr ∫ dp ∂p k ∂r k ∂r
∂Σ ∂p k
= ∫ dr ∫ dp −
(3.109d)
by integration by parts and where we denoted Σ = 1/2(η )2 . As above, the symmetric term in A, B, particularly fA s B s ∂η /∂r k ∂η /∂p k , disappears due to the antisymmetry of the Poisson bracket (a corresponding term with the opposite sign is present in the . . . terms). In summary, all the terms that remain from bracket (3.108) form the Poisson bracket of fluid mechanics, {A, B}(FM) = ∫ dr ρ (∂ i A ρ B u i − ∂ i B ρ A u i ) + ∫ dr u i (∂ j A u i B u j − ∂ j B u i A u j ) + ∫ dr s (∂ i A s B u i − ∂ i B s A u i ) ,
(3.110)
3.7 Fluid mechanics |
81
which expresses kinematics of the state variables of fluid mechanics (ρ, u, s). Fluid mechanics can thus be seen as Hamiltonian evolution. Let us now have a look at the evolution equations implied by the Poisson bracket of fluid mechanics, Equation (3.110). The bracket can be rewritten as {A, E}(FM) = ∫ dr A ρ ∂ i (−ρE u i ) + ∫ dr A u i (−ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s − ∂ j (u i E u j )) + ∫ dr A s (−∂ i (sE u i )) ,
(3.111)
from which the evolution equations for ρ, u and s can be read: ∂ρ = −∂ i (ρE u i ) ∂t ∂u i = −ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s − ∂ j (u i E u j ) ∂t ∂s = −∂ i (sE u i ) . ∂t
(3.112a) (3.112b) (3.112c)
These evolution equations express evolution of state variables (ρ, u, s) for any energy functional E. Let us now illustrate the consequences of two choices of the energy functional.
3.7.2 Euler compressible equations The usual prescription for energy in fluid mechanics is =e
⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞⏞ u2 E(ρ, u, s) = ∫ dr e(ρ, u, s) = ∫ dr + ε(ρ, s) , ⏟⏟2ρ ⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ kinetic
(3.113)
internal
where the former term represents the kinetic energy of the overall motion while the latter term represents internal energy of the fluid. Derivatives of this energy (calculated as functional derivatives) are Eρ = −
(u)2 + ερ , 2ρ 2
E ui =
u i def = vi , ρ
Es = εs .
(3.114)
Evolution equations (3.112) with energy (3.113) then become ∂ρ = −∂ i (ρv i ) ∂t ∂u i = −∂ i p − ∂ j (u i v j ) ∂t ∂s = −∂ i (sv i ) . ∂t
(3.115a) (3.115b) (3.115c)
82 | 3 Hamiltonian mechanics
Note that velocity and pressure were identified as v = Eu =
u ρ
(3.116a)
p = −e + ρE ρ + u i E u i + sE s = −ε + ρ
∂ε ∂ε +s . ∂ρ ∂s
(3.116b)
This expression for pressure will also be called the hydrodynamic pressure p(FM) hereafter. Equations (3.115) are the usual compressible Euler equations. Euler equations can be thus seen as Hamiltonian evolution. EXERCISE: Pressure Calculate spatial gradient of pressure (3.116b) to verify that it indeed appears on the right hand side of the evolution equation for momentum density.
EXERCISE: A projection that does not work Try to do the projection from the distribution function to fields ρ(r), u(r) and e(r) = ∫ dp p2 /2mf(r, p), which represent density, momentum density (as before), and total energy density. After plugging the functionals dependent only on these fields on the Boltzmann Poisson bracket, a term cubic in p will stay in the expression, which means that the projection cannot be carried out this way. We should project to the field of entropy. Another solution is to restrict the possible distribution functions to those symmetric with respect to p, e.g., locally Maxwellian distributions coming from the MaxEnt as in Section 2.7.8.
3.7.3 Local thermodynamic equilibrium In the case of the standard energy (3.113), the equation for pressure (3.116b) can be rewritten as p = −ε + ρμ + sT , (3.117) where μ = ε ρ and T = ε s are the local chemical potential (per kilogram) and local temperature by definition. By differentiating this equation it follows that 0 = s dT − dp + ρ dμ ,
(3.118)
as dε = ε ρ dρ + ε s ds = μ dρ + T ds due to ε = ε(ρ, s), which is the Gibbs–Duhem relation of locally equilibrium thermodynamics (e.g., [32]). Pressure (3.116b) is thus fully compatible with the standard local equilibrium definition of pressure. EXERCISE: Local thermodynamic equilibrium Recall the standard derivation of Gibbs–Duhem relation based on the assumption of local thermodynamic equilibrium [2, 32].
3.7 Fluid mechanics | 83
Hint: Local variables are ε = E/V, ρ = M/V and s = S/V, where E, M and S represent total energy, mass and entropy. Using the Gibbs relation (2.5), the Euler theorem for one-homogeneous functions gives E = TS − pV + μM. By differentiating this relation and by comparison with Equation (2.5), the Gibbs–Duhem relation 0 = s dT − dp + ρ dμ is obtained.
3.7.4 Weakly nonlocal fluid Energy (3.113) can in general depend also on spatial gradients of the state variables. For instance, energy of interfaces between two phases (e.g., gas and liquid) can be approximated by the square gradient energy E(SG) (ρ, u, s) = ∫ dr
u2 + ε(ρ, s) + 2ρ
with f(ρ, s, ∇ρ) =
f(ρ, s, ∇ρ) ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
,
(3.119)
= energy of interfaces
1 K(∇ρ)2 , 2
(3.120)
where K is a constant; see [20] or [5]. Note that it is necessary for generating coexisting phases that the bulk free energy (represented by Legendre transformation of ε(ρ, s)) is not convex at least in some region of densities and temperatures. The dependence of f(ρ, s, ∇ρ) on ∇ρ was written down explicitly in this section unlike in the preceding sections. EXERCISE: van der Waals fluid Recall the construction of van der Waals free energy from [2] or [5] and the derivation of energy (3.119) from [20] or [5].
A functional derivative of any total energy of the form E(SG) (ρ, u, s) = ∫ dr e(ρ, ∇ρ, u, s) with respect to density is (SG)
Eρ
=
δE(SG) ∂e ∂e = −∇⋅ . δρ ∂ρ ∂∇ρ
The evolution equation for momentum density becomes ∂u i = −ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s − ∂ j (u i E u j ) ∂t = −∂ i (−e + ρE ρ + u j E u j + sE s ) − ∂ j (u i E u j ) − ∂ i e + E ρ ∂ i ρ + E uj ∂ i u j + E s ∂ i s
(3.121)
84 | 3 Hamiltonian mechanics ∂e ) ∂u j ∂e ∂e ∂e ∂e ∂i uj − ∂i ρ − ∂i ∂j ρ − ∂i s − ∂ρ ∂∂ j ρ ∂u j ∂s ∂e ∂e ∂e ∂e ∂i uj + − ∂j ) ∂i ρ + ∂i s +( ∂ρ ∂ ∂j ρ ∂u j ∂s
= −∂ i (−e + ρE ρ + u j E u j + sE s ) − ∂ j (u i
= −∂ i (−e + ρE ρ + u j E u j + sE s ) − ∂ j (u i e u j ) − ∂ j (∂ i ρ
∂e ) . ∂ ∂j ρ
(3.122)
Note that the momentum is clearly conserved. Taking a particular energy of Korteweg type, i.e., upon choosing e = u2 /(2ρ)+ε+f with f defined in (3.120) whilst the functional derivatives with respect to momentum and entropy are the same as in the case of Euler equations, the momentum equation becomes uj ∂u i ∂ε ∂ε +s ) = −∂ j (u i ) − ∂ i (−ε + ρ ∂t ρ ∂ρ ∂s 1 (3.123) + ∂ i ( K(∇ρ)2 ) + ∂ i (ρ∂ j (K∂ j ρ)) − ∂ j (K∂ i ρ∂ j ρ) , 2 while the evolution equations for density and entropy density are the same as in Equations (3.112). The first term on the right hand side is the standard convective term and the second term is the gradient of the standard local equilibrium pressure. These terms are the same as in the Euler equations (3.115). The third, fourth and fifth terms are the Korteweg stresses, which express weakly nonlocal dynamics of fluids with interfaces. In summary, weakly nonlocal evolution equations can be generated by adding terms dependent on gradients of state variables into the energy functional. The evolution equations are then obtained by plugging such an energy into the Poisson bracket. For instance, dynamics of interfaces between liquid and vapor (Korteweg stresses) are obtained by plugging the energy quadratic in ∇ρ into the Poisson bracket of fluid mechanics.
3.7.5 Poisson bivector Poisson bracket (3.110) can be constructed from the underlying Poisson bivector. It is instructive to show what the bivector looks like in the case of fluid mechanics. The bivector can be obtained by direct application of formula (3.20). See Appendix A.5 for more rigorous discussion. The component of the bivector coupling the evolution of density with itself is ρ(ra ),ρ(rb )
LE
= {ρ(r a ), ρ(r b )}
(B)
= ∫ dr ∫ dp f(r, p) (
∂ ∂ρ(r a ) ∂ ∂ρ(r b ) −...) , ∂r k ∂f(r, p) ∂p k ∂f(r, p)
(3.124a)
3.7 Fluid mechanics | 85
where . . . stands for the same term as already present in the bracket but with ρ(ra ) and ρ(r b ) swapped. Using relations (3.106), this last equality becomes = ∫ dr ∫ dp f(r, p) (
∂mδ(ra − r) ∂mδ(r b − r) −...) = 0 . ∂p k ∂r k ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(3.124b)
=0
Therefore, this component of the Poisson bivector coupling density with density disappears. The component coupling density with momentum is given by ρ(ra ),u j (rb )
LE
= {ρ(r a ), u j (r b )}
(B)
= ∫ dr ∫ dp f(r, p) ( = ρ(r b )
∂δ(ra − r b ) j
∂mδ(ra − r) ∂p j δ(r b − r) − 0) ∂p k ∂r k
.
(3.125)
∂r b
The component coupling momentum with density can then be obtained by using the antisymmetry of the bivector, u (rb ),ρ(ra )
L Ej
= −ρ(r b )
∂δ(ra − r b ) j
.
(3.126)
∂r b
The antisymmetry is reflected in the minus sign and in swapping the coupled variables including their coordinates on the left hand side of the equation. Coupling between density and entropy is given by {ρ(r a ), s(r b )}
(B)
∂mδ(ra − r) ∂η (f(r, p))δ(r b − r) ) ∂p k ∂r k ∂ ∂η (f(r b , p)) = −m k ∫ dp f(r a , p) δ(r b − r a ) ∂p k ∂r a
= ∫ dr ∫ dp f(r, p) (
=m
∂ ∂r ka
∂η(f(r a , p)) (δ(r b − r a ) ∫ dp ) ∂p k ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ =0
=0.
(3.127)
Note that it was used in the last equality that all boundary terms simply disappear. This equation means that ρ(r ),s(rb ) =0. (3.128) LE a Coupling momentum with itself is given by u (ra ),u j (rb )
L Ei
= {u i (r a ), u j (r b )}
(B)
.
(3.129a)
Plugging relation (3.106b) into this expression, the expression becomes = ∫ dr ∫ dp f(r, p) (
∂p i δ(r a − r) ∂p j δ(r b − r) ∂p i δ(r a − r) ∂p j δ(r b − r) − ) . ∂p k ∂p k ∂r k ∂r k
86 | 3 Hamiltonian mechanics
Carrying out the derivatives and applying the delta distributions then leads to = u i (r b )
∂δ(rb − r a ) j ∂r b
− u j (r a )
∂δ(rb − r a ) ∂r ia
.
(3.129b)
Coupling between momentum and entropy is given by u (ra ),s(rb )
L Ei
⋅(
= {u i (r a ), s(r b )}(B) = ∫ dr ∫ dp f(r, p)
∂p i δ(r a − r) ∂η (f(r, p))δ(r b − r) ∂η (f(r, p))δ(r b − r) ∂p i δ(r a − r) − ) . ∂p k ∂p k ∂r k ∂r k
Integrating by parts with respect to r and applying the delta distribution δ(r a − r), this last expression becomes = ∫ dp − p i
∂
(f(r a , p)
∂r ka
− ∫ dp f(r a , p)δ ki
∂η (f(r a , p)) δ(r b − r a )) ∂p k
∂η (f(r a , p))δ(r b − r a ) ∂r ka
.
(3.130a)
Integrating by parts in the first term leads to =
∂ ∂r ka
(∫ dp δ(r b − r a ) (δ ki f(r a , p) + p i
∂f(r a , p) ) η (f(r a , p))) ∂p k
∂η (f(r a , p))δ(r b − r a )
− ∫ dp f(r a , p)δ ki
∂r ka
.
(3.130b)
Part of the first term cancels with the last term and what remains can be rewritten as = ∫ dp δ(r b − r a )
∂η(f(r a , p)) ∂r ia
+
∂ ∂r ka
∫ dp δ(r b − r a )p i
∂η(f(r a , p)) . ∂p k
(3.130c)
Using the Definition (3.105c), this last equality becomes = δ(r b − r a )
∂s(ra ) ∂r ia
+
∂ ∂r ka
(δ(r b − r a ) ∫ dp − δ ki η(f(r a , p))) .
(3.130d)
Finally, using the projection (3.105c) again, one obtains = δ(r b − r a ) = −s(r a )
∂s(ra ) ∂r ia
∂δ(rb − r a ) ∂r ia
∂δ(rb − r a )
+
∂r ka .
(−δ ki s(r a )) + δ(r b − r a )
∂(−s(ra )) ∂r ia (3.130e)
The last part of the hydrodynamic Poisson bivector that remains to be calculated is the component providing coupling between entropy and entropy: {s(r a ), s(r b )}(B) = ∫ dr ∫ dp f(r, p) (
∂η (f(r, p))δ(r a − r) ∂η (f(r, p))δ(r b − r) − ...), ∂p k ∂r k (3.131a)
3.7 Fluid mechanics |
87
where . . . stands for the same term as already present in the bracket but with a and b swapped. Integrating by parts in the terms containing δ(r a − r) yields ∂η(f(r, p)) ∂η (f(r, p))δ(r b − r) δ(r − r) a ∂p k ∂r k ∂2 η (f(r, p))δ(r b − r) + ∫ dr ∫ dp − η (f(r, p))δ(r a − r)f(r, p) ∂r k ∂p k ∂η(f(r, p)) ∂η (f(r, p))δ(r b − r) + ∫ dr ∫ dp δ(r a − r) ∂p k ∂r k 2 ∂ η (f(r, p))δ(r b − r) + ∫ dr ∫ dp f(r, p)η (f(r, p))δ(r a − r) . ∂r k ∂p k
= ∫ dr ∫ dp −
(3.131b)
The second term cancels with the last term and thus the equality becomes, after applying the δ(r a − r) distribution, ∂η(f(r a , p)) ∂η (f(r a , p))δ(r b − r a ) ∂η(f(r a , p)) ∂η (f(r a , p))δ(r b − r a ) −∫ dp . k ∂p k ∂p k ∂r a ∂r ka (3.131c) Integrating by parts in the first term and differentiating with respect to a parameter in the second term then leads to = ∫ dp
= ∫ dp − η(f(r a , p)) ( + ∫ dp −
∂ ∂r ka
∂2 η (f(r a , p))
δ(r b − r a ) +
∂η (f(r a , p)) ∂δ(rb − r a ) ) ∂p k ∂r ka
− ra ) +
∂η (f(r a , p)) ∂δ(rb − r a ) ) ∂p k ∂r ka
∂p k ∂r ka 2 ∂ η (f(r a , p)) η(f(r a , p)) ( δ(r b ∂p k ∂r ka
η(f(r a , p))η (f(r a , p)) (δ(r b − r a ) ∫ dp ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ α (f(ra ,p))
∂f(r a , p) ) . ∂p k
(3.131d)
The first two terms clearly cancel each other out. Let a primitive function of the function α be denoted by α. The last term can then be rewritten as =−
∂ ∂r ka
(δ(r b − r a ) ∫ dp
∂α(f(r a , p)) ) . ∂p k
(3.131e)
But integral of divergence of a function is zero as boundary terms vanish, and so we have obtained that s(r ),s(rb ) =0. (3.131f) LE a The Poisson bivector can then be summarized as 0
LE (r, r ) =
(−ρ(r) ∂δ ∂r 0
∂δ ρ(r ) ∂r ∂δ u(r ) ∂r
− u(r) ∂δ ∂r ∂δ s(r ) ∂r
0 ) , −s(r) ∂δ ∂r
(3.132)
0
where δ = δ(r − r ). Each entry of the matrix represents a component of the bivector.
88 | 3 Hamiltonian mechanics
3.7.6 Clebsch variables Alfred Clebsch [33] realized that it was possible to cast Euler equations of incompressible hydrodynamics into a form of Hamilton canonical equations. Such a reformulation is carried out by introducing the so called Clebsch variables. The Clebsch variables are composed of three couples, and each couple is considered as an element of a cotangent bundle. The canonical evolution equations of each couple are given by the Hamilton canonical equations, ∂ρ = E ρ∗ ∂t ∂λ = E λ∗ ∂t ∂s = E s∗ ∂t
and and and
∂ρ∗ = −E ρ ∂t ∂λ∗ = −E λ ∂t ∂s∗ = −E s . ∂t
(3.133a) (3.133b) (3.133c)
The Poisson bracket expressing kinematics of the Clebsch variables is thus the canonical one, {F, G}(Clebsch) = ∫ dr (F ρ G ρ∗ − G ρ F ρ∗ ) + ∫ dr (F λ G λ ∗ − G λ F λ ∗ ) + ∫ dr (F s G s∗ − G s F s∗ ) .
(3.134)
The Clebsch variables are related to the state variables of fluid mechanics through ρ=ρ,
s=s
and u = ρ∇ρ ∗ + λ∇λ∗ + s∇s∗ .
(3.135)
Five fields (ρ, u, s) are thus expressed by means of six fields x(Clebsch) = (ρ, ρ ∗ , λ, λ∗ , s, s∗ ), which are the Clebsch variables. One Clebsch variable is thus free to choose as discussed in [34]. Let us now try to project the Clebsch canonical Poisson bracket onto the state variables of fluid mechanics (ρ, u, s), where momentum density is given by formula (3.135). In order to proceed in the transformation, we have to first evaluate the necessary derivatives⁵ of the hydrodynamic fields with respect to the Clebsch variables, ∂ρ(r ) = δ(r − r ) , ∂ρ(r) ∂u(r ) = δ(r − r )∇ρ ∗ (r) , ∂ρ(r)
∂ρ(r ) =0, ∂ρ ∗ (r) ∂u(r ) = −∇(δ(r − r )ρ) , ∂ρ ∗ (r)
etc.
(3.136a)
etc.
(3.136b)
5 To calculate also derivatives with respect to the variables under gradient, it is advantageous to rewrite momentum density as u(r ) = ∫ dr δ(r − r )(ρ(r)∇ρ∗ (r) + λ(r)∇λ ∗ (r) + s(r)∇s∗ (r)).
3.8 Mechanics of deformation
| 89
Derivatives of a functional F then become δF δx(FM) (r ) δF = ∫ dr δρ(r) δx(FM) (r ) δρ(r) δF δF = ∫ dr ( ) δ(r − r ) + ( ) ⋅ ∇ (ρ ∗ (r ))δ(r − r ) δρ(r ) u,s δu(r ) ρ,s =(
δF δF ) +( ) ⋅ ∇(ρ ∗ (r)) δρ(r) u,s δu(r) ρ,s
(3.137a)
δx(Euler) (r ) δF δF = ∫ dr δρ ∗ (r) δx(FM) (r ) δρ ∗ (r) δF = ∫ dr ( ) ⋅ (−∇ [ρ(r )δ(r − r )]) δu(r ) ρ,s = ∇ ⋅ ((
δF ) ρ(r)) , δu(r) ρ,s
(3.137b)
and similarly for the other Clebsch variables. Poisson bracket (3.134) then transforms to the Poisson bracket (3.110) of fluid mechanics. Evolution of the Clebsch variables can be seen as a variational principle (3.6). This variational principle then serves as the variational principle leading to the Euler equations; see [34]. In summary, kinematics of the six Clebsch variables is given by a canonical Poisson bracket. After the projection onto the state variables of fluid mechanics (ρ, u, s), the canonical bracket becomes the Poisson bracket of fluid mechanics.
3.8 Mechanics of deformation In the preceding section we saw that kinematics of fluids is governed by a Poisson bracket. After an energy functional is specified, the evolution equations (for instance the Euler compressible equations) are obtained. A property of fluids is that no small volume (particle) of the fluid has any preferred position in the fluid – fluid particles have no labels denoting their identity. On the other hand, when deforming a solid elastically, each piece (particle) of the solid has its preferred position with respect to the other particles, which is called the Lagrangian configuration. Particles of solids can be equipped with some labels expressing their identity. Fluid particles have no identity while particles of perfect elastic solids have labels attached to them expressing their natural position among the other particles. When talking about fluids and solids, we should be always able to distinguish between them. But take for example the pitch drop experiment at the University of Queensland where solid asphalt is flowing through a hole in a vessel while forming drops. Is asphalt a fluid or a solid? On the other hand, complex fluids (e.g., polymeric fluids) exhibit some elastic behavior like solids. Are they really fluids? We are not aware of any definition of fluids and solids applicable in all those cases.
90 | 3 Hamiltonian mechanics
Therefore, it makes sense to seek kinematics that fit both fluids and solids simultaneously. The strategy here will be to equip the Poisson bracket of fluid mechanics with an additional field – the field of labels of the particles.
3.8.1 Kinematics of labels Let us first recall the standard kinematics of solids. The usual approach is to formulate the evolution equations in the Lagrangian coordinates R i (i.e., in terms of evolution of each continuum particle of the solid) because mechanics of the continuum particles is then simply related to classical Newtonian mechanics. On the other hand, balance equations of mass, momentum, energy, and angular momentum are naturally formulated in the Eulerian coordinates r i (attached to a laboratory frame), and one thus needs to use the mapping from the Lagrangian coordinates to the Eulerian coordinates. The classical treatment of elasticity, e.g., [35], is formulated in this way. However, when the material undergoes plastic deformations or even chemical reactions or phase transitions, where the continuum particles are deformed so much that they forget their initial shape or even disappear and are created, the mapping from the Lagrangian coordinates to the Eulerian coordinates loses its physical significance. Indeed, imagine a rod of iron from which a blacksmith has made a sword. What is the physical significance of where exactly in the rod continuum particles of the sword were? Or consider water in a pipe. What is the physical significance of where it was in a dam before entering the pipe? The reference Lagrangian configuration itself loses its physical significance and plays merely the role of an initial condition or a transformation of variables suitable for computations (in the case of elasticity). Because the balance equations, which are naturally formulated in the Eulerian frame, still keep their physical meaning even when the reference configuration does not, it seems to be advantageous to formulate the evolution equations of solids purely within the Eulerian coordinates. The usual mechanics of solids can be of course transformed into the Eulerian frame and we will come to those equations in a few moments. But let us first return to the strategy of equipping fluid mechanics with the field of labels. The purpose is to start formulating the kinematics in the Eulerian frame and to stay in that frame. We will never rely on the Lagrangian reference frame. The aim here is to find evolution equations describing balance of mass, momentum and entropy (or energy) as well as kinematics of individual particles of the continuum (particle labels). Therefore, the state variables will be density ρ(r), momentum density u(r), entropy density s(r), and volume density of the labels b(r). The volume density of labels is a vector field that expresses where the material at given Eulerian position belongs (name of the material particle). The reversible evolution of the state variables is required to be Hamiltonian, i.e., generated by a Poisson bracket. A Poisson bracket governing evolution of variables ρ, u and s is the standard Poisson bracket of fluid mechanics (3.110), which expresses
3.8 Mechanics of deformation
| 91
that mass density and entropy density are passively advected by the momentum density (momentum density has other contributions apart from the passive advection, stemming from the antisymmetry of the coupling with the density and entropy density fields and from the coupling with itself). This can be seen either from the evolution equations (3.112) or from the geometric structure (semidirect product) behind the Poisson bracket [36]. For instance, in the evolution equation for the field of density, there is only the derivative of energy with respect to momentum on the right hand side, and we say that density is advected by momentum. When another field is to be advected by momentum, the structure of the Poisson bracket (or the evolution equations) will be analogous. Therefore, it is clear how to add another passively advected field – the volume density of labels b. The overall bracket becomes {A, B}(E+Labels) = ∫ dr ρ (∂ i A ρ B u i − ∂ i B ρ A u i ) + ∫ dr u i (∂ j A u i B u j − ∂ j B u i A u j ) + ∫ dr s (∂ i A s B u i − ∂ i B s A u i ) + ∫ dr b i (∂ j A b i B u j − ∂ j B b i A u j )
(3.138)
for any two functionals A and B of the state variables. This is the Poisson bracket expressing kinematics of fields ρ, u, s and volume density of labels b. However, each label should correspond to a concrete continuum particle of the material rather than to a volume of the material, and thus we perform transformation from b to def b a = , (3.139) ρ which is the mass-density of labels. Derivatives of a functional A then transform by (
bi δA δA(ρ, u, s, a(ρ, b)) δA δA ) =( ) = −( ) δρ u,s,b δρ δρ u,s,a δa i ρ,u,s ρ 2 =(
ai δA δA ) −( ) δρ u,s,a δa i ρ,u,s ρ
(3.140a)
(
δA δA =( ) ) δu ρ,s,b δu ρ,s,a
(3.140b)
(
δA δA =( ) ) δs ρ,u,b δs ρ,u,a
(3.140c)
(
1 δA(ρ, u, s, a(ρ, b)) δA δA , = =( ) ) δa i ρ,u,s ρ δb i ρ,u,s δb i
(3.140d)
and bracket (3.138) then becomes {A, B}(Lin) = {A, B}(FM) + ∫ dr ∂ j a i (A u j B a i − B u j A a i ) .
(3.141)
92 | 3 Hamiltonian mechanics
This Poisson bracket was first introduced in [37], where it was referred to as the Lin Poisson bracket. EXERCISE: Lin Poisson bracket Derive bracket (3.141). Hint: Plug functionals dependent only on ρ, u, s and a into bracket (3.138).
The evolution equations implied by bracket (3.141) are ∂ρ ∂t ∂u i ∂t ∂s ∂t ∂a i ∂t
= −∂ i (ρE u i )
(3.142a)
= −∂ j (u i E u j ) − ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s − a j ∂ i E a j + ∂ i (a j E a j )
(3.142b)
= −∂ i (sE u i )
(3.142c)
= −E u j ∂ j a i .
(3.142d)
These equation express kinematics of mass, momentum, entropy and the field of labels (per unit mass). When the field a is interpreted as the Lagrangian coordinate of a particle, the evolution equations are the same as the standard equations of continuum mechanics transformed into the Eulerian frame. Indeed, the first three equations represent balance of mass, momentum and entropy while the fourth equation tells us simply that the Lagrangian coordinates are advected by the velocity field. Additionally, a deformation gradient from continuum mechanics F is directly linked to the gradient of the j field of labels per unit mass as ∂ i a j = ∂R j /∂r i = (F i )−1 , which is a direct consequence of the choice of Poisson bracket where we added b as a passivelly advected field. In order to write the equations down explicitly, we have to choose an energy potential E(ρ, s, u, a). Besides the kinetic energy, which is of course u2 /(2ρ), and internal energy, which is a function of ρ and s, the deformation energy should be taken into account. This energy can depend explicitly on the field a itself as well as on the spatial gradient of the field, ∇a, which expresses deformations of the body, i.e., E = ∫ dr
u2 + ε(ρ, s) + f(ρ, s, a, ∇a) . 2ρ
(3.143)
The dependence on ∇a is written explicitly for the sake of clarity. The functional derivative of energy with respect to the field of labels a is then E ai =
∂f ∂f − ∂j , ∂a i ∂ ∂j ai
and the other derivatives are calculated as in the case of fluid mechanics.
(3.144)
3.8 Mechanics of deformation
|
93
EXERCISE: Continuum mechanics in the Eulerian frame Write down the evolution equations implied by bracket (3.141) and energy (3.143) explicitly.
For instance, the evolution equation for the field of labels is ∂a + v ⋅ ∇a = 0 , ∂t
(3.145)
where velocity v is identified with Eu . This is exactly the equation describing how Lagrangian coordinates are advected by velocity in the Eulerian frame. The evolution equations generated by the Lin Poisson bracket are thus fully compatible with standard reversible equations of continuum mechanics expressed in the Eulerian frame. EXERCISE: A difficult one. Derive bracket (3.141) from the Liouville Poisson bracket. Actually, this is an open problem. The Liouville Poisson bracket works also for distribution functions that are not symmetrized with respect to particle permutations. The symmetrization was used first in the projection to the Boltzmann Poisson bracket. We believe that a projection from the N-particle distribution function to the fields of fluid mechanics and labels (or to the distortion matrix introduced below) should be possible.
3.8.2 Geometric derivation Poisson bracket (3.141) can be alternatively derived geometrically by employing the formulas for semidirect products, e.g., formula (43) in [38], ∗
{A, B}(l
×T ∗ V)
∗
= {A, B}(l ) + {A, B}(T
∗
V)
+ ⟨A v , B ξ ⊳ v⟩ − ⟨B v , A ξ ⊳ v⟩ + ⟨α, A ξ ⊳ B α ⟩ − ⟨α, B ξ ⊳ A α ⟩ .
(3.146)
This bracket expresses kinematics of a Lie algebra dual l∗ , ξ ∈ l∗ , coupled with a cotangent bundle T ∗ V, (v, α) ∈ T ∗ V. The coupling is just one sided, which means that the Lie algebra dual acts on the cotangent bundle. The ⟨∙, ∙⟩ brackets denote a scalar product, here the standard L2 scalar product, i.e., simple integration. Finally, for example action B ξ ⊳ v stands for minus the Lie derivative −LB ξ v, and the other actions are interpreted analogously. This is the meaning of bracket (3.146). Let us suppose that the functionals do not depend on α, i.e., elements of the dual to the vector space V. Bracket (3.146) then reduces to ∗
{A, B}(l
×V)
∗
= {A, B}(l ) + ⟨A v , B ξ ⊳ v⟩ − ⟨B v , A ξ ⊳ v⟩ .
(3.147)
The fields of fluid mechanics ρ, u and s, can be seen as elements of a Lie algebra dual l∗ ; see e.g., [36] or [39]. Consider now the vector field of labels interpreted as
94 | 3 Hamiltonian mechanics
an element of a vector space V. Bracket (3.147) then becomes ∗
{A, B}(l
×V)
= ∫ dr ρ (∂ i A ρ B u i − ∂ i B ρ A u i ) + ∫ dr u i (∂ j A u i B u j − ∂ j B u i A u j ) + ∫ dr s (∂ i A s B u i − ∂ i B s A u i ) + ∫ dr (B a i A u j ∂ j a i − A a i B u j ∂ j a i ) ,
(3.148)
which is the same Poisson bracket as bracket (3.141).
3.8.3 Kinematics of a general distortion matrix Energy in evolution equations (3.142) for fluid mechanics with labels often depends only on a spatial gradient of the field of labels, unlike on the field itself. This means that only deformations contribute to the overall energy. The spatial gradient of the field of labels thus plays an important role and will be referred to as the distortion matrix, A ij = ∂ j a i . (3.149) The distortion matrix, which was developed by S. K. Godunov, T. Mikhailova, E. Romenski and I. Peshkov [40–42], expresses local variations of the field of labels, i.e., deformations of the continuum; see also Section 5.8. The definition of the distortion matrix implies the compatibility conditions ∂ k A ij = ∂ j A ik ∀ i, j, k ,
that is
ε ljk ∂ j A ik = 0 ∀ l
⇐⇒
∇×A= 0.
(3.150)
When these conditions are met, the field of labels can be reconstructed from the distortion matrix by integration of the distortion matrix, and the distortion matrix can be interpreted as inverse of the standard deformation tensor A = F−1 ; see e.g., [43]. We will, however, never rely on such an interpretation because otherwise we would have to work in the Lagrangian reference frame, which may not be uniquely defined in the presence of dissipation (when conditions (3.150) are violated). We actually never step into the Lagrangian frame. Transforming Poisson bracket (3.138) into variables (ρ, u, s, A) by letting the two functionals depend only on the new variables leads to the Poisson bracket of fluid mechanics with the distortion matrix (F and G are again some arbitrary functionals of the state variables), {F, G}(FM+A) = {F, G}(FM) + ∫ dr A ij (G u j ∂ k F A ik − F u j ∂ k G A ik ) .
(3.151)
This bracket is a Poisson bracket, in particular it fulfills the Jacobi identity (checked with software [44]), if and only if the compatibility conditions (3.150) hold.
3.8 Mechanics of deformation
|
95
However, as we shall demonstrate later, irreversible evolution can violate these conditions and hence the distortion matrix loses the connection (3.150) with the field of labels. Indeed, having ∇×A ≠ 0 also means that integral of A over a closed loop does not necessarily give zero, which means that the field of labels cannot be reconstructed in a unique way from the distortion matrix. When the material undergoes irreversible deformation, identity of the particles (the labels) are altered or lost. Within the scope of classical continuum mechanics, the compatibility conditions are lost. We need to extend the Poisson bracket so that it fulfills the Jacobi identity also for the distortion matrices not satisfying the compatibility condition. The extension should be done in such a way that bracket (3.151) is recovered for curl-free distortion matrices, which means that the extra terms (to be added to the bracket) should thus be multiplied by ∇ × A. Moreover, in order to generate only reversible evolution (Poisson bracket describes only the reversible evolution; see Section 4.1 below), the extra terms should provide additional coupling between A (even with respect to time reversal) and momentum u (odd) because u is the only variable with opposite parity than A. The new distortion matrix bracket then reads {F, G}(DM) = {F, G}(FM) + ∫ dr A ij (G u j ∂ k F A ik − F u j ∂ k G A ik ) + ∫ dr (∂ k A ij − ∂ j A ik ) (F A ik G u j − G A ik F u j ) ,
(3.152)
and it fulfills the Jacobi identity unconditionally (checked with software [44]). Note that the extra terms cannot be multiplied by any number or function without violating the Jacobi identity, which makes the choice of the extension unique at least when considering this particular form of extensions. This bracket is equivalent (via the transformation from the Eulerian to the Lagrangian frame) with the Poisson bracket from [45]. Poisson bracket (3.152) leads to evolution equations ∂ρ = −∂ i (ρE u i ) ∂t ∂u i = −∂ j (u i E u j ) − ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s ∂t − A ji ∂ k E A jk − (∂ k A ji − ∂ i A jk )E A jk = −∂ i p − ∂ j (u i E u j ) + ∂ j σ ij ∂s = −∂ i (sE u i ) . ∂t ∂A ik = −∂ k (A ij E u j ) + (∂ k A ij − ∂ j A ik )E u j , ∂t
(3.153a)
(3.153b) (3.153c) (3.153d)
where the generalized pressure p and extra stress tensor σ ij were identified as p = ρE ρ + sE s + u i E u i + A ij E A ij − e ,
σ ij = −A ki E A kj + A kl E A kl δ ij .
(3.154)
96 | 3 Hamiltonian mechanics Note that e is the volume density of total energy, i.e., E = ∫ dr e. The Cauchy stress can be defined as T ij = −pδ ij + σ ij . (3.155) Equations (3.153) are the same as the Eulerian SHTC (symmetric hyperbolic thermodynamically compatible) Equations ([46] or Section 5.8), and they can also be seen as a consequence of the transformation from the Lagrangian to the Eulerian frame ([43] or Section 3.8.5). It should be borne in mind that the distortion matrix is no longer required to have zero curl and the Jacobi identity is now fulfilled for all distortion matrices. Evolution equations (3.153) are Galilean invariant, as they can be rewritten in terms of material derivatives ∂ t + v ⋅ ∇ and gradients of velocity. Kinematics of the field of labels is the same as kinematics of Lagrangian coordinates of the fluid particles in the Eulerian frame. Therefore, kinematics of the distortion matrix expressed by Poisson bracket (3.151), where only matrices with zero curl are allowed, is the same as kinematics of inverse of the deformation tensor, which is standard in continuum mechanics, as shown in Section 3.8.5. Similarly, although the extended Poisson bracket (3.152) allows for distortion matrices with nonzero curl, it is equivalent to bracket (3.151) for matrices with zero curl and is thus also compatible with standard continuum mechanics. However, after adding dissipation to the field of the distortion matrix (Section 5.8), the equations leave the scope of classical continuum mechanics because the Lagrangian coordinates can no longer be reconstructed uniquely in general. In summary, the Euler Poisson bracket was first enriched with the field of labels, the kinematics of which is pure advection. That is the setting of classical continuum mechanics in the Eulerian frame. Due to the required invariance with respect to spatial shifts, only spatial gradients of the field of labels (the distortion matrix) were kept among the state variables, and a new Poisson bracket followed. The bracket fulfilled the Jacobi identity only for curl free distortion matrices, and to satisfy the identity also for distortion matrices with nonzero curl it was necessary to add (in a unique way) extra terms to the Poisson bracket. The Poisson bracket expressing kinematics of non-curl-free distortion matrices has then been found, and the evolution equations implied by the bracket are the same as the known SHTC equations.
3.8.4 Distortion with labels We can also let the functionals depend on both labels and the distortion matrix. By combining brackets (3.141) and (3.152), we obtain Poisson bracket {F, G}(DM+labels) = {F, G}(DM) + ∫ ∂ j a i (A u j B a i − B u j A a i ) dr .
(3.156)
3.8 Mechanics of deformation
| 97
3.8.5 Alternative derivation of kinematics of a distortion matrix The original derivation of kinematics of the distortion matrix relied on the interpretation of A as the inverse of the deformation tensor A = F−1 , where F is the deformation tensor known from continuum mechanics, F ij =
∂r i (R, t) , ∂R j
(3.157)
with R being the Lagrangian coordinate and r(R, t) the corresponding Eulerian coordinate. By differentiating this definition with respect to time, we obtain the standard evolution equation for the deformation tensor ∂ r ̇i ∂v i ∂v i ∂r k = = . Ḟ ij = ∂R j ∂R j ∂r k ∂R j
(3.158)
The Eulerian version of this evolution equation is (∂ t + v ⋅ ∇)F ij = ∂ k v i F kj .
(3.159)
By multiplying this equation with A from left and from right, the evolution equation for the distortion matrix, Equation (3.153d), is obtained. The Poisson bracket for the distortion matrix can then be constructed by ‘reverse engineering’ the evolution equations; see Appendix A.5. EXERCISE: Evolution of distortion matrix Derive the evolution equation for distortion matrix, Equation (3.153d), from Equation (3.159).
3.8.6 Kinematics of the left Cauchy–Green (or Finger) tensor One of the main motivations for developing the GENERIC framework was modeling of rheological properties of complex fluids [47, 48], where it is popular to include a symmetric positive definite tensor into the set of state variables, e.g., the conformation tensor. Here we choose the left Cauchy–Green tensor (or Finger tensor), which has been shown to be useful when describing complex fluids [49–51]. The left Cauchy–Green tensor is defined as −1 Bij = A−1 ik A jk ,
(3.160)
which is compatible with the standard definition if the distortion matrix satisfies the condition of zero curl. The condition is necessary for compatibility with the standard continuum mechanics. However, dissipative processes may destroy the condition, and the definition of the left Cauchy–Green (LCG) tensor (3.160) is thus more general than the standard definition.
98 | 3 Hamiltonian mechanics
Derivative of an arbitrary functional of the fields of fluid mechanics and the left Cauchy–Green tensor F(ρ, u, s, B) with respect to the distortion matrix then becomes F A mn =
δF δF ∂Bij = . δA mn δBij ∂A mn
(3.161a)
By differentiating the identity δ il = A−1 ik A kl we obtain ∂A−1 ik −1 A kl = −A−1 ik δ km δ ln = −A im δ ln , ∂A mn
(3.161b)
which yields after multiplication by A−1 lr ∂A−1 ir −1 = −A−1 im A nr . ∂A mn
(3.161c)
Using this last equality and by differentiating Definition (3.160), we obtain that ∂Bij −1 −1 −1 −1 −1 −1 −1 = −A−1 im A nk A jk − A ik A jm A nk = −A im B nj − A jm B in , ∂A mn
(3.161d)
from which it follows that −1 F A ik = −FBmn A−1 mi B kn − F Bmn A ni B mk .
(3.161e)
Substituting this last relation into equation (3.152) leads to {F, G}(LCG) = {F, G}(FM) − ∫ dr A ij (∂ k G u j F A ik − ∂ k F u j G A ik ) − ∫ dr ∂ j A ik (F A ik G u j − G A ik F u j ) −1 = {F, G}(FM) + ∫ dr A ij (∂ k G u j FBmn (A−1 mi B kn + A ni B mk ) − . . . ) −1 + ∫ dr ∂ j A ik (FBmn G u j − GBmn F u j ) (A−1 mi B kn + A ni B mk )
= {F, G}(FM) + ∫ dr (∂ k G u j (FBjn Bkn + FBmj Bmk ) − . . . ) −1 −1 −1 −1 −1 −1 − ∫ dr (FBmn G u j − GBmn F u j ) ⋅ (∂ j A mi A ik A kr A nr + ∂ j A ni A ik A mr A kr ) ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂ j Bmn
= {F, G}
(FM)
− ∫ dr ∂ j Bik (FBik G u j − GBik F u j )
+ ∫ dr Bkm ((FBmj + FBjm ) ∂ k G u j − (GBmj + GBjm ) ∂ k F u j ) , = {F, G}(LCG) , (3.162) which is the Poisson bracket expressing kinematics of fluid mechanics enhanced with the LCG tensor. Note that . . . stands for the expression analogous to the expression
3.8 Mechanics of deformation
| 99
T −T in front of it with F and G swapped; A ij A−1 mi = A ji A im = δ jm and B is symmetric as follows directly from its definition. The resulting bracket depends only on the fields of fluid mechanics and tensor B (not A), which means that it indeed is a Poisson bracket. This bracket generates the following reversible evolution equations:
∂ρ = −∂ i (ρE u i ) ∂t ∂u i = −∂ j (u i E u j ) − ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s ∂t − Bjk ∂ i EBjk + ∂ k (Bkm (EBmi + EBim )) + ∂ i (Bjk EBjk )
(3.163a)
= −∂ j (u i E u j ) − ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s + EBjk ∂ i Bjk + ∂ k (Bkm (EBmi + EBim )) ∂s = −∂ i (sE u i ) ∂t ∂Bij = −E u k ∂ k Bij + Bki ∂ k E u j + Bkj ∂ k E u i . ∂t
(3.163b) (3.163c) (3.163d)
In particular, the evolution equation for B, Equation (3.163d), can be expressed by means of the upper convected derivative, ∇
A ij = ∂ t A ij + v k ∂ k A ij − ∂ k v i A kj − ∂ k v j A ik ,
(3.164)
which is a measure for the rate of change of some quantity expressed in the coordinate system rotating and stretching with the infinitesimal element. The evolution equation ∇
of the left Cauchy–Green tensor is then B = 0, unless dissipation is introduced. The evolution equation for momentum (3.163b) can be rewritten as ∂u i = −∂ j (u i E u j ) + ∂ j T ij , ∂t where
T ij = −pδ ij + Bkl EBkl δ ij + Bjk (EBik + EBki ) , p = −e + ρE ρ + u j E u j + sE s + Bjk EBjk
(3.165)
(3.166)
are the Cauchy stress tensor and generalized pressure. The total energy is prescribed as integral of an algebraic function of the state variables E = ∫ dr e(ρ, u, s, B) = ∫ dr (
u2 + ε(ρ, s) + e(el) (ρ, s, B)) , 2ρ
(3.167)
where ε plays the role of internal energy and e(el) the role of elastic energy. Kinematics of the LCG tensor B can be thus seen as a consequence of kinematics of the distortion matrix (3.152), which in turn will lie outside of the scope of the standard continuum mechanics after dissipative terms have been added. Evolution equations (3.163) will play an important role later when discussing complex fluids in Section 5.7.
100 | 3 Hamiltonian mechanics
Alternatively, we can decide to work with the conformation tensor, which is defined as c ij = ρBij . (3.168) By plugging functionals F and G dependent on ρ, u, s and c into the LCG bracket, Equation (3.162), we obtain {F, G}(FM+c) = {F, G}(FM) + ∫ dr c ik (∂ j F c ik G u j − ∂ j G c ik F u j ) + ∫ dr c ik (F c ik ∂ j G u j − G c ik ∂ j F u j ) + ∫ dr c km ((F c mj + F c jm ) ∂ k G u j − (G c mj + G c jm ) ∂ k F u j ) ,
(3.169)
which is the Poisson bracket expressing kinematics of fluid mechanics and the conformation tensor. This bracket can also be derived from two point kinetic theory; see Equation (5.104). The bracket is nearly the same as bracket (3.162), the only difference is that (apart from the complementary antisymmetric contribution to the momentum equation) the evolution equation for c has en extra term c ⋅ ∇(Eu ).
3.8.7 Elasticity When the distortion matrix has a zero curl, it is equal to the inverse of the deformation tensor as in Section 3.8.5. This connection makes it possible to take the standard elastic energy functionals from standard continuum mechanics and express them in terms of the distortion matrix. The Cauchy stress can be determined either by Equation (3.155) or by Equation (3.166). To find the explicit formulas for Cauchy stress, it is necessary to specify the total energy functional. Let it be either E = ∫ dr e(ρ, u, s, B) = ∫ dr (
u2 + ε(ρ, s) + e(el) (ρ, s, A)) 2ρ
(3.170)
or Equation (3.167). Once energy is specified, the reversible part of the evolution equations is implied by the corresponding Poisson bracket (Equation (3.152) or (3.162)). In particular, the Cauchy stress can be read from the right hand side of the evolution equation for momentum. Let us now have a look at two common choices of the dependence of energy on B. A comprehensive review of elastic energies can be found in [52], where the elastic dependence of energy on LCG is encoded into the strain energy density function W, related to total energy through ∫ dr e(el) (ρ, s, B) = ∫ dR ρ 0 W(B) ,
(3.171)
3.8 Mechanics of deformation
| 101
where R is the Lagrangian coordinate and ρ 0 the mass density ρ 0 = det
∂r ρ. ∂R
(3.172)
Elastic energy density can then be rewritten as e(el) (ρ, s, B) = ρW(B) ,
(3.173)
and Cauchy stress (3.166) becomes T ij = − (−
uj u2 u2 − ε − ρW + ρ (− 2 + ε ρ + W) + u j + sε s + ρBkl WBkl ) δ ij 2ρ ρ 2ρ
+ ρBkl WBkl δ ij + ρBjk (WBik + WBki ) = −p(FM) δ ij + ρBjk (WBik + WBki )
with
p(FM) = −ε + ρε ρ + sε s ,
(3.174)
which is compatible with the standard expression for Cauchy stress (Equation 2.3 in [52]). For instance, the strain energy of an isotropic neo-Hookean material can be prescribed as μ W (neo-Hooke) = (tr B − 3) , (3.175) 2 which leads to Cauchy stress (3.174) (neo-Hooke)
T ij
= −p(FM) δ ij + μρB ij ,
(3.176)
where p(FM) is the hydrodynamic pressure defined by Equation (3.116b). Energy of a linear Hooke elasticity, see e.g., [53], can be specified as W (Hooke) =
1 (Bij − δ ij )C ijkl (Bkl − δ kl ) , 4
(3.177)
where the tensor of elastic constants C ijkl is clearly symmetric with respect to swapping indexes ij ↔ kl, i ↔ j and k ↔ l. The Cauchy stress (3.174) becomes (Hooke)
T ij
= −p(FM) ρ(B jk − δ jk )C jkmn (B mn − δ mn ) + ρδ jk C ikmn (B mn − δ mn ) = −p(FM) + ρC ijmn (Bmn − δ mn ) + O(B − I)2 ≈ −p(FM) + ρC ijmn (Bmn − δ mn )
(3.178)
up to the order of O(B − I)2 . This is the linearized elasticity, where the stress tensor is proportional to B − I via the tensor of elastic constants.
3.8.8 Non-Newtonian fluids Non-Newtonian fluids are fluids that do not obey the Navier–Stokes equation, Section 4.6.2.2. This is often the result of internal elasticity caused by the presence of
102 | 3 Hamiltonian mechanics
polymeric molecules. The chains of the polymeric molecules are often approximated by dumbbells (two beads connected with a spring) as in Section 2.7.13, where the extra field of conformation tensor c was included into the state variables (apart from concentration n = ρ/m and kinetic energy of the beads ε). Only kinetic energy of the beads was considered in Section 2.7.13. Apart from this energy also the elastic energy of the springs connecting the beads, average of HR2 /2, should be taken into account. Constant H is the spring constant and R2 is the square of the relative position of the beads (elongation of the dumbbell). Using the MaxEnt value of the distribution function (2.176), this elastic energy density can be estimated as e(el) = ∫ dR ∫ dp1 ∫ dp2 = ∫ dR ∫ dp1 ∫ dp2 ⋅ exp (− =
H 2 ̃ R f 2
c∗ij H 2 1 n∗ ) exp (− R i R j ) R 6 exp (−1 − 2 kB kB h
p2 e∗ p21 ( + 2 )) k B 2m 2m
c∗ij H 1 n∗ 2πmk B 3 )( ) ∫ dR R2 exp (− R i R j ) ⋅ 6 exp (−1 − 2 kB kB ε∗ h 5/2
π3/2 k B H det QQ km Q kn δ mn 2 2 1 H k k = k B HQ l Q l n = tr c , 4 2 =
⋅
n∗ 2πmk B 3 1 exp (−1 − ) ( ) kB ε∗ h6 (3.179)
where several relations from Section 2.7.13 were used. Elastic energy of the springs is thus proportional to the trace of the conformation tensor. Total energy density is then e=
1 u2 1 det c + H tr c + ε (n, s − k B n ln ) , 2ρ 2 2 n
(3.180)
where the dependence ε(n, ∙) comes from the expression for the dumbbell suspension entropy (2.181) of the dumbbells. The derivative of the total energy density with respect to the conformation tensor is ∂e 1 k B n −1 = HI − T ⋅ c , ∂c 2 2
(3.181)
where local temperature T = e s was identified. Note the use of the Jacobi formula ∂ ln det c = c−1 . ∂c
(3.182)
The conformation tensor is related to the LCG tensor through B = c/n. This relation is compatible with Equation (3.168) either by identification ρ = mn or by introducing a
3.9 Mechanics of heat |
103
new state variable – dumbbell concentration n. Finally, derivative of total energy with respect to LCG becomes ∂e ∂e 1 = n = n (HI − k B TB−1 ) , ∂B ∂c 2
(3.183)
which plays the role of conjugate LCG in the energetic representation. Plugging this energy density into the expression for Cauchy stress tensor (3.174) leads to 1 (HI − k B TB−1 ) 2 = −p(FM) I + n (HB − k B TI) ,
T(Maxwell) = −p(FM) I + 2nB ⋅
(3.184)
which is the reversible part of the stress tensor in the Maxwell model for polymeric fluids.
3.9 Mechanics of heat Kinematics of heat transfer can be thought of as kinematics of phonons⁶, and kinematics of phonons has been successfully described by Boltzmann-like dynamics, where the distribution function of phonons plays the role of a state variable. For instance, there is a whole chapter devoted to that topic in [55]. By the reduction from the kinetic theory to fluid mechanics, as in Section 3.7.1 (from f to ρ, u and s), kinematics of phonons can be expressed in terms of the entropy density and momentum related to entropy transport, the kinematics of which is expressed by a Poisson bracket [56] {F, G}(phonons) = ∫ dr π i (∂ j F π i G π j − ∂ j G π i F π j ) + ∫ dr s (∂ i F s G π i − ∂ i F s G π i ) ,
(3.185)
where π is a momentum flux associated with transport of the phonons π i (r) = ∫ dp p i f(r, p) .
(3.186)
6 Definition according to Britannica[54]: Phonon, in condensed matter physics, is a unit of vibrational energy that arises from oscillating atoms within a crystal. Any solid crystal, such as ordinary table salt (sodium chloride), consists of atoms bound into a specific repeating three dimensional spatial pattern called a lattice. Because the atoms behave as if they are connected by tiny springs, their own thermal energy or outside forces make the lattice vibrate. This generates mechanical waves that carry heat and sound through the material. A packet of these waves can travel throughout the crystal with a definite energy and momentum, so in quantum mechanical terms the waves can be treated as a particle, called a phonon. A phonon is a definite discrete unit or quantum of vibrational mechanical energy, just as a photon is a quantum of electromagnetic or light energy.
104 | 3 Hamiltonian mechanics
In order to describe both transport of matter and entropy, bracket (3.185) has to be coupled with the kinematics of density and momentum density, i.e., Poisson bracket {F, G}(u,ρ) = ∫ dr ρ (∂ i F ρ G u i − ∂ i G ρ F u i ) + ∫ dr u i (∂ j F u i G u j − ∂ j G u i F u j ) ,
(3.187)
which is equivalent to the fluid mechanics Poisson bracket with a constant temperature T. Simultaneous kinematics of matter and entropy is then expressed by the sum of the corresponding Poisson brackets {F, G}(u,ρ,π,s) = {F, G}(u,ρ) + {F, G}(phonons) .
(3.188)
Since both transport mechanisms are equipped with momentum, let us introduce also the total momentum m=u+π . (3.189) The transformation (ρ, u, s, π) to (ρ, m, s, π) turns Poisson bracket (3.188) into {F, G}(m,ρ,π,s) = {F, G}(FM) + ∫ dr s (∂ i F s G π i − ∂ i G s F π i ) u=m + ∫ dr π i (∂ j F m i G π j − ∂ j G m i F π j ) + ∫ dr π i (∂ j F π i G m j − ∂ j G π i F m j ) + ∫ dr π i (∂ j F π i G π j − ∂ j G π i F π j ) ,
(3.190)
where we denoted by {F, G}(FM) |u=m the Poisson bracket of fluid mechanics, (3.110), with the symbol u replaced by m (not a transformation). Instead of working with momentum of phonons, it is advantageous to work with field w defined as π = ws , (3.191) which will be referred to as the conjugate entropy flux (the name will become clear later). The subsequent transformation from (ρ, m, s, π) to (ρ, m, s, w = π/s) leads to bracket {F, G}(Cat) = {F, G}(FM) + ∫ dr (G w i ∂ i F s − F w i ∂ i G s ) u=m + ∫ dr w j (∂ i F w i G m j − ∂ i G w i F m j ) + ∫ dr (∂ i w j − ∂ j w i ) (F w i G m j − G w i F m j ) + ∫ dr
1 (∂ i w j − ∂ j w i )F w i G w j , s
(3.192)
expressing kinematics of matter and heat – the Cattaneo Poisson bracket. The name Cattaneo is due to the implied hyperbolicity of heat transport [43].
3.9 Mechanics of heat | 105
Poisson bracket (3.192) generates evolution equations ∂ρ = −∂ k (ρE m k ) ∂t ∂m i = −∂ j (m i E m j ) − ∂ j (w i E w j ) − ρ∂ i E ρ − m j ∂ i E m j − s∂ i E s ∂t − w k ∂ i E w k + ∂ i (E w k w k ) ∂s = −∂ k (sE m k + E w k ) ∂t ∂w k 1 = −∂ k E s − ∂ k (w j E m j ) + (∂ k w j − ∂ j w k ) (E m j + E w j ) . ∂t s
(3.193a)
(3.193b) (3.193c) (3.193d)
These evolution equations express reversible dynamics of fluid mechanics and conjugate entropy flux w. To find the heat flux implied by these evolution equations, it is necessary to write down the evolution equation for total energy density e(ρ, m, s, w). By chain rule it follows that ∂e ∂e ∂ρ ∂e ∂m k ∂e ∂s ∂e ∂w k = + + + ∂t ∂ρ ∂t ∂m k ∂t ∂s ∂t ∂w k ∂t = −∂ k ((ρE ρ + m i E m i + sE s )E m k ) − ∂ k (E s E w k ) − ∂ k (w i E m i E w k ) .
(3.194)
The first term on the right hand side corresponds to the hydrodynamic enthalpy e + p, as can be seen by comparison with the definition of pressure in Euler equations (3.116b). The last term then represents transport of the energy stored in the field w itself. Therefore, the next to last term is the only one defining heat flux q. As E s can be referred to as the temperature T and E w k is the entropy flux J(s) (see the right hand side of Equation (3.193c)), the heat flux is identified as the part of total energy flux q = E s E w k = TJ(s) .
(3.195)
This equality tells us that entropy flux is equal to the heat flux divided by temperature, J(s) = q/T, which is a relation widely used in thermodynamics. This relation can be thus seen as a consequence of the Cattaneo Poisson bracket (3.192), coupling kinematics of matter and heat. In summary, kinematics of phonons can be expressed by the Boltzmann Poisson bracket for the distribution function of phonons. Projection from the distribution function to the fields of momentum of phonons and entropy density turns the Boltzmann Poisson bracket to the fluid-mechanics-like Poisson bracket for the momentum and entropy density of phonons. Simultaneous kinematics of matter and phonons is given by the sum of the fluid-mechanics-like Poisson bracket for density and momentum of matter (ρ, u) and the bracket for phonons (π, s). Transformation to the total momentum m = u + π and conjugate entropy flux w = π/s then leads to the Cattaneo Poisson
106 | 3 Hamiltonian mechanics
bracket (3.192), which expresses the hyperbolic kinematics of matter and heat. In particular, heat flux (a part of total energy flux) is then equal to the entropy flux divided by temperature, which is a classical relation usually assumed in nonequilibrium thermodynamics. Here we have derived it.
3.10 Electromagnetic field 3.10.1 Maxwell equations in a vacuum Maxwell equations govern evolution of the electromagnetic field. They were first derived by J. C. Maxwell based on his fluid mechanistic imagination [57]. The probably most frequent modern derivation of Maxwell equations starts with a Lagrangian as a functional of the tensor of an electromagnetic field, see for instance [58], and variation of the Lagrangian then gives the equations in a special relativistic form. Let us now show how to derive the Maxwell equations in the Hamiltonian setting. Consider the cotangent bundle of a covector density A(r), which plays the role of vector potential, coupled with a vector field D(r), which plays the role of the electric displacement field in electromagnetism. This geometrical structure is a physical assumption. The Poisson bracket of the cotangent bundle is canonical, {F, G}(EM)A = ∫ dr (FD ⋅ GA − GD ⋅ FA ) .
(3.196)
The Poisson bracket is then a mathematical consequence of the physical assumption that the fields A and D form a cotangent bundle. The displacement field is even with respect to the time reversal transformation (discussed in Section 4.1), while the vector potential is odd, i.e., it changes its sign when the direction of time is reversed. Let us assume that the physically relevant quantity is the magnetic field B(r) = ∇ × A. By letting the functionals depend only on D and B, the derivative of the functionals with respect to A can be calculated as follows. First we calculate the derivative of the magnetic field with respect to the vector potential, δB k (r ) ∂A l (r) δ δ ∂δ(r − r ) =− ε kjl A l (r) = ∫ dr δ(r − r )ε kjl ∫ dr δA i (r) δA i (r) ∂r j δA i (r) ∂r j = −ε kji
∂δ(r − r ) . ∂r j
(3.197)
This expression can then be used to obtain derivatives of the functionals with respect to the magnetic field, δF δF δB k (r ) δF ∂δ(r − r ) = ∫ dr = − ∫ dr ε kji δA i (r) δB k (r ) δA i (r) δB k (r ) ∂r j δF ∂ δF ∂ =− ∫ dr ε kji δ(r − r ) = ε ijk . ∂r j δB k (r ) ∂r j δB k (r)
(3.198)
3.10 Electromagnetic field |
107
Bracket (3.196) then becomes {F, G}(EM) = ∫ dr (FD ⋅ (∇ × GB ) − GD ⋅ (∇ × FB )) .
(3.199)
The evolution equations implied by this bracket are ∂D i = ε ijk ∂ j E B k , i.e., ∂ t D = ∇ × EB ∂t ∂B k = ε ijk ∂ j E D i = −ε kji ∂ j E D i , i.e., ∂ t B = −∇ × ED . ∂t
(3.200a) (3.200b)
Electric and magnetic intensities are defined as the conjugate variables E = ED
and H = EB ,
(3.201)
and Maxwell equations (3.200) then obtain the standard vacuum form ∂tD = ∇ × H
(3.202a)
∂ t B = −∇ × E .
(3.202b)
Note that there is no electric current because no matter was assumed to be present thus far. Coupling with matter will be taken into account below. Due to the construction B = ∇×A, we get another Maxwell equation automatically: div B = 0 .
(3.203)
From Maxwell equation (3.200a) it follows that ∂ t div D = 0
(3.204)
in a vacuum, which means that we can fix the divergence to zero, div D = 0 ,
(3.205)
because otherwise the field D could never vanish completely. This last Maxwell equation will be updated below when coupling with transport of matter is taken into account. The Maxwell equations in a vacuum are required to be linear. Therefore, energy has to be quadratic, 1 2 1 2 E(EM)vac = ∫ dr D + B . (3.206) 2ε0 2μ0 This energy leads to the standard vacuum relations E = ED =
1 1 D and H = EB = B, ε0 μ0
(3.207)
where ε0 and μ 0 are the vacuum permittivity and permeability. In summary, Maxwell equations (3.200) represent the Hamiltonian evolution of fields D and B, and they can be derived from Hamilton canonical equations for fields. Maxwell equation (3.203) represents the physical input that only curl of the vector potential is relevant. Finally, Equation (3.205) is a result of Equation (3.200a).
108 | 3 Hamiltonian mechanics
3.10.2 Charged particle in electromagnetic field Hamiltonian mechanics of particles was described in Section 3.1.2. It is generated by the canonical Poisson bracket and kinetic energy p2 /2m. Maxwell equations in a vacuum were also shown to be Hamiltonian in Section 3.10.1, and they are generated by the canonical Poisson bracket for fields. Both kinematics are equipped with momentum, p in the case of particles and qA, i.e., charge multiplied by the vector potential, in the case of electromagnetism. The latter part of the total momentum of a particle in electromagnetic field follows from the fact that A is odd with respect to the time reversal transformation and from the fact that the dimension of A is equal to momentum over charge. The total momentum of a particle in the electromagnetic field is thus P = p + qA ;
(3.208)
see also p. 48 in [58]. Kinematics of a particle in electromagnetic field and of the field itself is given by the sum of the two particular Poisson brackets, {F, G}(CM+EMA ) = {F, G}(CM) + {F, G}(EM)A = F q i G P i − G q i F P i + ∫ dr (FD ⋅ GA − GD ⋅ FA ) .
(3.209)
Note that q or q i stands for position of the particle while q for charge of the particle. Finally, energy of the particle in the field (otherwise in a vacuum) is E=
(P − qA(q))2 + E(EM)vac , 2m
(3.210)
where the first part is the usual kinetic energy of the particle with A evaluated at the position of the particle, A(q) = ∫ dr δ(r − q)A(r) .
(3.211)
The evolution equations implied by bracket (3.209) and energy (3.210) are P i − qA i (q) p i = = v i (velocity) m m P j − qA j (q) =− ⋅ (−q(∂ i A j )r=q ) = qv j ∂ i A j m = −E i
q i̇ = E P i =
(3.212a)
P i̇ = −E q i
(3.212b)
∂ t A i = −E D i
P i − qA i (q) (EM) ⋅ (−qδ(r − q)) + E A i m = −qv i δ(r − q) + (∇ × H)i .
(3.212c)
∂t Di = EAi =
(3.212d)
The second equation can be further rewritten (using the definition of total momentum (3.208)) as p i̇ + q(∂ t A i + v j ∂ j A i ) = qv j ∂ i A j , (3.213)
3.10 Electromagnetic field | 109
where the time derivative Ȧ was interpreted as following the motion of the particle. Using the evolution equation for A, this last equation becomes p i̇ = qv j (∂ i A j − ∂ j A i ) + qE i ,
(3.214)
ṗ = q(E + v × B) ,
(3.215)
or which is the usual Lorentz force. The evolution equation for D contains a contribution from motion of the particle – the electric current. EXERCISE: Charge density Try to interpret what happens when divergence is applied to Equation (3.212d). Hint: Assume continuity equation for charge density and use the Gauss theorem.
In summary, the Poisson bracket expressing kinematics of a particle in an electromagnetic field and of the field itself is the sum of the canonical bracket for motion of the particle and the canonical bracket for the field. The presence of the field contributes to the total momentum of the particle. Energy is composed of the kinetic energy of the particle and the energy of the electromagnetic field. The resulting Hamilton canonical equations give motion of the particle including the Lorentz force, and Maxwell equations including charge density and electric current.
3.10.3 Kinetic electrodynamics Motion of one particle in an electromagnetic field was described in Section 3.10.2. What about evolution of a distribution of charged particles? Kinematics of a oneparticle distribution function is expressed by the Boltzmann Poisson bracket (3.99). Evolution of the one-particle distribution function and electromagnetic field will be called kinetic electrodynamics (KED). As in the preceding section, joint kinematics of the distribution function dependent on the total momentum of the particles f ̄(r, P) and of fields D and A is expressed by sum of the respective Poisson brackets (3.99) and (3.196), ̄ {F, G}B = {F, G}(KED)A = {F, G}(B) + {F, G}(EM)A , p=P
(3.216)
where the Boltzmann Poisson bracket is understood in terms of the total momentum P and distribution f ̄(r, P), ̄
{F, G}(B) = ∫ dr ∫ dP f ̄(r, P) (
∂ ∂ ∂ δF δG δG δF ∂ − ) . ∂r k δ f ̄(r, P) ∂P k δ f ̄(r, P) ∂r k δ f ̄(r, P) ∂P k δ f ̄(r, P) (3.217)
110 | 3 Hamiltonian mechanics
Let us now transform this Poisson bracket to the distribution function dependent only on the kinetic momentum of the particles p, which is related to the total momentum through Equation (3.208), f(r, p + qA) = f ̄(r, P) .
(3.218)
Firstly, partial derivatives of f ̄ with respect to space and momentum transform as (
∂f ∂f ∂f(r, p + qA(r)) ) =( ) + q( ) ∂k Aj ∂r k ∂r k p ∂p j r P
(
∂f(r, p + qA(r) ∂f ) =( ) . ∂P k ∂p k r r
(3.219a) (3.219b)
Therefore the Boltzmann Poisson bracket in r, p coordinates becomes ̄
δF δG δG δF ∂ ∂ ∂ ∂ − ) ∂r k δf(r, p) ∂p k δf(r, p) ∂r k δf(r, p) ∂p k δf(r, p) ∂F f ∂G f ∂G f ∂F f − ) . + ∫ dp qf(r, p)∂ j A k ( ∂p j ∂p k ∂p j ∂p k ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
{F, G}(B) = ∫ dr ∫ dp f(r, p) (
= qf B⋅(
∂F f ∂p
×
∂G f ∂p
)
(3.220) Similarly, the derivative of the distribution function with respect to the vector potential is δf(r , p + qA) ∂f = qδ(r − r) , (3.221) δA i (r) ∂p i and the functional derivative of an arbitrary functional F = F(f ̄(r , P), B(r )) becomes δF δF δB k (r ) δ f ̄(r , P) δF = ∫ dr ∫ dP + ∫ dr δA i (r) δB k (r ) δA i (r) δ f ̄(r , P) δA i (r) ∂f . = ε ijk ∂ j F B k + q ∫ dp F f(r,p) ∂p i
(3.222)
Change of variables from P to p and Equation (3.197) were used in the last equality. Bracket {F, G}(EM)A then becomes {F, G}(EM)A = {F, G}(EM) + ∫ dr ∫ dp q
∂f (F D i G f − G D i F f ) . ∂p i
(3.223)
The whole Poisson bracket (3.216) then becomes {F, G}(KED) = {F, G}(B) + {F, G}(EM) ∂f (F D i G f − G D i F f ) ∂p i ∂F f ∂G f × + ∫ dr ∫ dp qf B ⋅ ( ) . ∂p ∂p + ∫ dr ∫ dp q
(3.224)
3.10 Electromagnetic field | 111
This is the Poisson bracket of kinetic electrodynamics, which expresses kinematics of the distribution function f(r, p) and fields D and B. Let us now specify an energy functional, in particular energy of matter and electromagnetic field in a vacuum, E = ∫ dr ∫ dp
p2 f(r, p) + E(EM)vac . 2m
(3.225)
This energy with Poisson bracket (3.224) then leads to evolution equations ∂E f ∂f ∂E f ∂f ∂ ∂f ∂E f ∂f + −q E Dk − (ε ijk B i qf ) (3.226a) =− ∂t ∂r k ∂p k ∂p k ∂r k ∂p k ∂p j ∂p k pk D k ∂f ∂f p k ∂f −q − qε jki B i (3.226b) =− m ∂r k ε0 ∂p k ∂p j m p ∂f p ∂f − q (E + × B) ⋅ (3.226c) =− ⋅ m ∂r m ∂p ∂D p = ∇ × H − q ∫ dp f (3.226d) ∂t m ∂B = −∇ × E . (3.226e) ∂t Note that the first equation contains the Lorentz force and the second contains the electric current density. Let us now return to the Maxwell equation connecting divergence of the displacement field with charge density. Divergence of Equation (3.226d) gives ∂f p ⋅ ∂r m pj ∂f ∂f ∂f + q2 ∫ dp E ⋅ = q ∫ dp +q2 ∫ dp ε ijk B k ∂t ∂p m ∂p i ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
∂ t div D = −q ∫ dp
=0
1 ∂f ε ijk δ ij B k f − q2 ∫ dp ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ = q ∫ dp ∂t m =0
= ∂ t ∫ dp qf .
(3.227)
Using mass density ρ = ∫ dp mf , we obtain that ρ , (3.228) m i.e., divergence of the displacement field is equal to the charge density. These equations are of course accompanied by equation (3.203), div B = 0. In summary, kinematics of the distribution function dependent on the total particle momentum in an electromagnetic field and of the field itself is expressed by the sum of the particular Poisson brackets (Boltzmann and electromagnetic). After the transformation from the total momentum to the kinetic momentum, the Poisson brackets become coupled – Equation (3.224). This Poisson bracket expresses evolution of state variables f(r, p), D(r) and B(r). div D = q
112 | 3 Hamiltonian mechanics
3.10.4 Electromagnetohydrodynamics Kinematics of fluid mechanics was shown in Section 3.7.1 to be a projection of kinematics of the kinetic theory. The Poisson bracket of fluid mechanics (3.110) was obtained as the projection of the Boltzmann Poisson bracket (3.99). Since the Boltzmann Poisson bracket has been coupled with kinematics of electromagnetism, we are now in position to project the coupled kinematics to fluid mechanics coupled with an electromagnetic field. 3.10.4.1 Momentum of matter The projection from the state variables of kinetic electrodynamics, f(r, p), D and B, is analogous to projection (3.105), ρ(ra ) = ∫ dr ∫ dp mf(r, p)δ(r − ra )
(3.229a)
u i (r a ) = ∫ dr ∫ dp p i f(r, p)δ(r − r a )
(3.229b)
s(r a ) = ∫ dr ∫ dp η(f(r, p))δ(r − r a )
(3.229c)
D(r) = D(r) and B(r) = B(r) ,
(3.229d)
and derivative of a functional with respect to the distribution function becomes δF = mA ρ + p i A u i + η A s , δf(r, p)
(3.230)
exactly as in Equation (3.107). Poisson bracket (3.224) then becomes (some calculations carried out already in Section 3.7.1 were omitted) {F, G}(KED) = {F, G}(FM) + {F, G}(EM) + ∂f (F D i (mG ρ + p j G u j + η G s ) − . . . ) ∂p i ∂ + ∫ dr ∫ dp qfB i ε ijk (mF ρ + p a F u a + η F s ) ∂p j ∂ ⋅ (mG ρ + p b G u b + η G s ) ∂p k
+ ∫ dr ∫ dp q
= {F, G}(FM) + {F, G}(EM) − ∫ dr ∫ dp qf (F D i G u i − . . . ) + ∫ dr ∫ dp q (F D i G s + ∫ dr ∫ dp qfB i ε ijk (F u j +
∂η − ...) ∂p i
∂η ∂η F s ) ⋅ (G u k + Gs ) ∂p j ∂p k
3.10 Electromagnetic field | 113
= {F, G}(FM) + {F, G}(EM) ρ + ∫ dr q (F u i G D i − G u i F D i ) + 0 m ∂η ∂η ρ + ∫ dr q B ⋅ (Fu × Gu ) + 0 + 0 + ∫ dr dp qfB i ε ijk Fs Gs m ∂p j ∂p k ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ = ∇η ×∇η = 0
= {F, G}(FM) + {F, G}(EM) ρ ρ + ∫ dr q (F u i G D i − G u i F D i ) + ∫ dr q B ⋅ (Fu × Gu ) . m m
(3.231)
This last expression no longer depends on the distribution function itself, and we have thus acquired the Poisson bracket expressing kinematics of mass, momentum and entropy density together with the electromagnetic field, {F, G}(EMHD’) = {F, G}(FM) + {F, G}(EM) + ∫ dr q + ∫ dr q
ρ (F u i G D i − G u i F D i ) m
ρ B ⋅ (Fu × Gu ) . m
(3.232)
Let us refer to this bracket as to the electromagnetohydrodynamic bracket (EMHD’). The reason for the prime will become clear in Section 3.10.4.4. The evolution equations given by the EMHD’ Poisson bracket are ∂ρ = −∂ i (ρE u i ) ∂t ∂u i ρ = −ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s − ∂ j (u i E u j ) + q (E i + ε ijk E u j B k ) ∂t m ∂s = −∂ i (sE u i ) ∂t ρ ∂ t D = ∇ × H − q Eu m ∂ t B = −∇ × E ,
(3.233a) (3.233b) (3.233c) (3.233d) (3.233e)
where the definition of electric and magnetic intensities, Equation (3.201), was used. Note the Lorentz force in the equation for momentum density and electric current in the equation for D. These equations are again equipped with div B = 0
and
div D = q
ρ . m
(3.233f)
The argument leading to the latter equality is the same as in the preceding section. The energy functional can be taken for instance as E = ∫ dr (
u2 + ε(ρ, s)) + E(EM)vac , 2ρ
(3.234)
114 | 3 Hamiltonian mechanics which leads to Eu = v, D = ε0 E, B = μ0 H and evolution equations ∂ρ = −∂ i (ρv i ) ∂t ∂u i ρ = −∂ i p(FM) − ∂ j (u i E u j ) + q (E i + ε ijk v j B k ) ∂t m ∂s = −∂ i (sE u i ) ∂t ρ ε0 ∂ t E = ∇ × H − q v m μ 0 ∂ t H = −∇ × E ,
(3.235a) (3.235b) (3.235c) (3.235d) (3.235e)
where p(FM) is the hydrodynamic expression for pressure (3.116b). Maxwell equations in (3.235) are based on the linear relationship between D, B and E, H, which are implied by the choice of the quadratic vacuum electromagnetic energy. However, the electromagnetic energy can be specified as nonquadratic and dependent on the matter (fields ρ and s). Definitions (3.201) still hold true, but the relations between E and D, and between H and B, become nonlinear as in the following section. 3.10.4.2 Electrostatics in a vacuum In thermodynamic equilibrium, where the velocity of matter is zero and fields do not evolve in time anymore, equations (3.235) further simplify to ∇×E= 0,
∇×H =0,
div E =
qρ ε0 m
and
div H = 0 .
(3.236)
From the first equation it follows by Helmholtz decomposition that there is a scalar field of electrostatic potential φ(r) such that E = −∇φ .
(3.237)
The third equation then becomes a Poisson equation for the potential, ∆φ = −
qρ , ε0 m
(3.238)
which can be solved analytically for certain simple domains (by the method of Green’s functions) or numerically (for instance by the finite element method). 3.10.4.3 Polarization and magnetization Energy of the electromagnetic field in a vacuum is quadratic and specified by (3.206). Electric and magnetic intensities are then in linear relations with field D and B due to Equations (3.201). The interaction of an electromagnetic field and matter can however lead to more complex energy functionals, and the relations between E and D and between H and B may become nonlinear.
3.10 Electromagnetic field |
115
The case of thermodynamic equilibrium Equation (3.233e) suggests that electric intensity can be expressed by means of an electric potential E = −∇φ. This equality together with the latter of Equations (3.233f) lead to the Poisson equation for the electric potential (3.238) due to the linearity of the relation between D and E in the case of the vacuum electromagnetic energy (3.206). If the relation between D and E is nonlinear due to a more complex energy of the electromagnetic field in interaction with matter, the Poisson equation no longer holds in general. However, since the Poisson equation is simple to solve and interpret, it is advantageous to introduce the field of polarization def
P(r) = D − ε0 E .
(3.239a)
The field of magnetization is defined similarly as def
μ0 M(r) = B − μ0 H .
(3.239b)
Note that E and H are still defined as the derivatives of energy with respect to D and B respectively, Equations (3.201). Divergence of the displacement and magnetic fields can then be rewritten as ρ −ε0 ∆φ = q − div P (3.240a) m div H = div M . (3.240b) The term − div P is sometimes interpreted as bounded charge density, but we prefer not to work with such an interpretation as it is not necessary. In particular, if the electromagnetic energy is E(EM) = ∫ dr
D2 B2 + , 2ε0 ε r 2μ0 μ r
(3.241)
where ε r and μ r are the relative permittivity and permeability, electric and magnetic intensities become D B E= and H = , (3.242) ε0 ε r μ0 μ r and polarization and magnetization can be written as P = ε0 (ε r − 1)E
and M = (μ r − 1)H .
(3.243)
Finally, Equation (3.240a) becomes ρ , (3.244) m which is the Poisson equation for linearly polarized bodies. Note that ε r can depend on other state variables of the system or position. In summary, fields D and B are the state variables describing the electromagnetic field. Electric and magnetic intensity are then defined as the derivatives of energy with respect to D and B. Fields of polarization and magnetization are auxiliary fields defined by (3.239), which are helpful when solving, for instance, the Poisson equation of electrostatics. − ε0 div (ε r ∇φ) = q
116 | 3 Hamiltonian mechanics
3.10.4.4 Total momentum The EMHD’ Poisson bracket derived in Section 3.10.4.1 generates evolution equations for mass density ρ, momentum density of matter u, entropy density of matter s, and electromagnetic fields D and B; Equations (3.233). Looking at the equation for momentum density of matter, Equation (3.233b), is the momentum conserved? The first four terms on the right hand side are in the form of divergence of a tensor field and thus conserve momentum. To see this, have a look at the construction of pressure (3.116b), which is analogous. Note that a certain structure, but still quite a general one, is required to be assumed; see (3.113). The last term, which is the Lorentz force, however is not in the form of a divergence and can be thus interpreted as a source of momentum. The momentum of mass is not conserved because part of the momentum can be exchanged with the electromagnetic field, which has its own momentum. Let us now find the momentum of the electromagnetic field itself by rewriting the Lorentz force as a divergence of a tensor field and partial time derivative of electromagnetic momentum. To simplify the calculation, we will start from the result that the electromagnetic momentum is m(EM) = D × B
(3.245)
and go backwards by applying a time derivative to this momentum. Using Equations (3.233), the time derivative of the electromagnetic momentum becomes ρ ∂ t (ε ijk D j B k ) = ε ijk (ε jmn ∂ m H n − q E u j ) B k − ε ijk D j ε kmn ∂ m E n m ρ = −q ε ijk E u j B k − (∂ i H k − ∂ k H i )B k − D j (∂ i E j − ∂ j E i ) m ρ = −q ε ijk E u j B k − E i ∂ j D j + ∂ j (E i D j ) − D j ∂ i E j − B j ∂ i H j + ∂ j (H i B j ) m ρ (3.246) = −q (E i + ε ijk E u j B k ) + ∂ j (E i D j + H i B j ) − D j ∂ i E j − B j ∂ i H j . m The first term on the right hand side is the negative of the Lorentz force, which thus transfers momentum between the electromagnetic field and matter. The second term is in the form of divergence of a tensor field – the electromagnetic stress tensor. The last two terms can be interpreted in two ways: 1. In the case of a vacuum they become − ∂i (
2.
D2 B2 + ) , 2ε0 2μ0
(3.247)
which is a part of the electromagnetic stress tensor. In the case of interaction of matter and field, when the electromagnetic energy becomes more complex and possibly dependent also on the state variables of the matter, the terms are included into the generalized pressure p(EMHD’) = −e + ρ
∂e ∂e ∂e ∂e ∂e +u⋅ +s +D⋅ +B⋅ , ∂ρ ∂u ∂s ∂D ∂B
where e is the total energy density, i.e., E = ∫ dr e(ρ, u, s, D, B).
(3.248)
3.10 Electromagnetic field | 117
This generalized pressure tensor stands on the right hand side of the evolution equation for total momentum m = u + m(EM) = u + D × B ,
(3.249)
which reads ∂m (3.250) = ∂ t u + ∂ t (D × B) = −∂ i p(EMHD’) − ∂ j (u i E u j ) + div(E ⊗ D + H ⊗ B) . ∂t The total momentum of the matter and electromagnetic field is thus conserved, and we have verified that expression (3.245) indeed represents the momentum not included in u, i.e., the momentum of the electromagnetic field. It is also advantageous to transform Poisson bracket (3.232) to state variables (ρ, m, s, D, B), i.e., to the total momentum density (3.249). Derivatives of the func̃ m(u, D, B), s, D, B)) tionals transform as (denoting F(ρ, u, s, D, B) = F(ρ, F D i = F̃ D i
F ρ = F̃ ρ , Fu = F̃ m , F s = F̃ s , − ε ijk F̃ m j B k , and F B i = F̃ B i + ε ijk F̃ m j D k ,
(3.251)
as follows by direct calculation of the derivatives of the functionals and the chain rule. When bracket (3.232) is evaluated at functionals dependent on the total momentum m, instead of the momentum of matter u it becomes (dots indicate the complementary antisymmetric terms, i.e., with F and G swapped) {F, G}(EMHD’) = ∫ dr ρ(∂ i F ρ G m i − . . . ) + ∫ dr s(∂ i F s G m i − . . . ) + ∫ dr (m i − ε ijk D j B k ) (∂ l F m i G m l − . . . ) + ∫ dr [(F D i − ε ipq F m p B q )ε ijk ∂ j (G B k + ε krs G m r D s ) − . . . ] qρ (F m i (G D i − ε ijk G m j B k ) − . . . ) m qρ B i ε ijk F m j G m k + ∫ dr m
+ ∫ dr
= {F, G}(FM) |m + {F, G}(EM) − ∫ dr ε ijk D j B k (∂ l F m i G m l − . . . ) + ∫ dr (F D i ε ijk ε krs ∂ j (G m r D s ) − . . . ) − ∫ dr ε ipq ε ijk (F m p B q ∂ j G B k − . . . ) − ∫ dr ε ipq ε ijk ε krs (F m p B q ∂ j (G m r D s ) − . . . ) + ∫ dr ∂ j D j [(F m i G D i − . . . ) − (F m i ε ijk G m j B k − . . . ) + B i ε ijk F m j G m k ] , (3.252) where the {F, G}(FM) |m is the Poisson bracket of fluid mechanics (3.110) with momentum m instead of u, and where the charge density qρ/m was replaced with ∂ j D j . In this
118 | 3 Hamiltonian mechanics
last expression we have the Poisson bracket of fluid mechanics, the Poisson bracket of electromagnetic field, terms coupling momentum (e.g., containing Fm ) with momentum, terms coupling momentum with electromagnetic field, and terms coupling electromagnetic fields FD and FB with themselves. The strategy is to show that the terms coupling momentum with momentum disappear. But let us first focus on the other terms. When ignoring the terms coupling momentum with itself, i.e., containing Fm and Gm , expression (3.252) can be rewritten as (using also by parts integration) = {F, G}(FM)(m) + {F, G}(EM) + ∫ dr (F m i D j ∂ j G D i − . . . ) + ∫ dr D i (∂ j F D i G m j − . . . ) + ∫ dr B k (∂ j F B k G m j − . . . ) + ∫ dr B j (F m k ∂ j G B k − . . . ) + ∫ dr ∂ j D j (F m i G D i − . . . ) .
(3.253)
Note the use of formula ε ijk ε imn = δ jm δ kn − δ jn δ km . What remains is to show that the terms coupling momentum with itself sum up to zero. The terms are ∫ dr
qρ ε ijk (B i F m j G m k + 2B k F m j G m i ) m
(3.254a)
+ ∫ dr ε krs (∂ j F m j B k G m r D s − . . . )
(3.254b)
+ ∫ dr ε krs (F m j ∂ j B k G m r D s − . . . )
(3.254c)
− ∫ dr ε krs (∂ j F m k B j G m r D s − . . . )
(3.254d)
+ ∫ dr ε ijk ∂ l D j B k (F m i G m l − . . . )
(3.254e)
+ ∫ dr ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ε ijk D j B k (F m i ∂ l G m l − . . . ) .
(3.254f)
= ε krs D s B k (F m r ∂ j G m j −... )
Now note that the second and last lines cancel with each other. Introducing notation def
w l = ε lmn F m m G m n ,
(3.255)
3.10 Electromagnetic field |
119
expression (3.254) becomes = ∫ dr
qρ (B i w i − B k w k ) m
(3.256a)
− ∫ dr ε krs B j D s (∂ j F m k G m r − . . . )
(3.256b)
+ ∫ dr ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ε krs ∂ j B k D s ε jrl w l
(3.256c)
= ∂ j B j D l w l −∂ j B l D j w l
+ ∫ dr ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ε ijk ∂ l D j B k ε ilr w r
(3.256d)
= ∂ j D j B k w k −∂ k D j B k w j
+ ∫ dr ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ε ijk D j ∂ l B k ε ilr w r
(3.256e)
= D j ∂ j B k w k −D j ∂ k B k w j
The first line cancels with the first half of the fourth line, and the second part of the third line cancels with the first part of the last line. Therefore, only the second line and the second half of the fourth line remain, and the expression becomes (using by parts integration in the latter term) = ∫ dr D j B k ∂ k w j − ∫ dr ε krs B j D s (∂ j F m k G m r − . . . )
(3.257a)
= ∫ dr D j B k ε jrs (∂ k F m r G m s + F m r ∂ k G m s ) − ∫ dr B j D k ε srk ∂ j F m s G m r + ∫ dr B j D k ε srk ∂ j G m s F m r
(3.257b)
= ∫ dr D j B k ε jrs (∂ k F m r G m s + F m r ∂ k G m s ) + ∫ dr B k D j ε jrs ∂ k F m s G m r − ∫ dr B k D j ε jrs ∂ k G m s F m r
(3.257c)
= ∫ dr D j B k ε jrs (∂ k F m r G m s + ∂ k F m r G m s )
(3.257d)
=0,
(3.257e)
where the last equality follows from the simultaneous symmetry and antisymmetry with respect to swapping r ↔ s. The terms coupling momentum with momentum are thus indeed zero.
120 | 3 Hamiltonian mechanics
Finally, the Poisson bracket expressing kinematics of fields ρ, m, s, D and B is {F, G}(EMHD) = {F, G}(FM) + {F, G}(EM) + ∫ dr D i (∂ j F D i G m j − ∂ j G D i F m j ) + ∫ dr ∂ j D j (F m i G D i − G m i F D i ) + ∫ dr (F m i D j ∂ j G D i − G m i D j ∂ j F D i ) + ∫ dr B i (∂ j F B i G m j − ∂ j G B i F m j ) + ∫ dr ∂ j B j (F m i G B i − G m i F B i ) + ∫ dr (F m i B j ∂ j G B i − G m i B j ∂ j F B i ) ,
(3.258)
where the term next to last line was added because it is zero by the condition (3.233f) and because the bracket then becomes more symmetric with respect to D and B. Bracket (3.258) was derived in [59] and in [38] and [43] by means of semidirect product. It is, moreover, compatible with the SHTC framework 5.8, where evolution equations are hyperbolic. Note that this bracket could be simplified by using Equations (3.233f), but it is advantageous to keep it in the present form because the Jacobi identity is then satisfied unconditionally, unlike bracket (3.232), which needs Equations (3.233f) for validity of the Jacobi identity. Bracket (3.258) is the Poisson bracket of electromagnetohydrodynamics expressed in terms of the total momentum. The evolution equations implied by bracket (3.258) follow: ∂ρ = − div(ρEm ) (3.259a) ∂t ∂m i = −∂ j (m i E m j ) ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ −ρ∂ i E ρ − m j ∂ i E m j − s∂ i E s − D j ∂ i E D j − B j ∂ i E B j ∂t = −∂ i p (EMHD)
+ ∂ j (D j E D i + B j E B i ) ∂s = − div (sEm ) ∂t ∂D i = −∂ j (D i E m j − E m i D j − ε ijk E B k ) − E m i ∂ j D j ∂t ∂B i = −∂ j (B i E m j − E m i B j + ε ijk E D k ) − E m i ∂ j B j , ∂t
(3.259b) (3.259c) (3.259d) (3.259e)
where generalized pressure p(EMHD) is defined as p(EMHD) = −e + ρ
∂e ∂e ∂e ∂e ∂e +m⋅ +s +D⋅ +B⋅ . ∂ρ ∂m ∂s ∂D ∂B
(3.260)
These equations are also equipped with Equations (3.233f), which further simplify the last terms of Equations (3.259d) and (3.259e). The terms, however, can also be left in
3.10 Electromagnetic field |
121
the equations so that they keep their hyperbolic structure as in the SHTC framework from Section 5.8. Energy of the electromagnetic field and matter (3.234) was written in state variables (ρ, u, s, D, B). In terms of variables (ρ, m, s, D, B), i.e., using the total momentum m, it becomes E = ∫ dr ( = ∫ dr (
(m − D × B)2 + ε(ρ, s)) + E(EM) 2ρ m2 m 1 − ⋅ (D × B) + (D × B)2 + ε(ρ, s)) + E(EM) . 2ρ ρ 2ρ
(3.261)
This energy can be plugged into Equations (3.259a) to obtain explicit evolution equations for the EMHD state variables. In summary, during the transformation from the EMHD’ state variables (ρ, u, s, D, B) to the EMHD state variables (ρ, m, s, D, B), which are equipped with total momentum m, the EMHD’ Poisson bracket (3.232) turns into the EMHD Poisson bracket (3.258). The latter bracket is easier to understand from the geometrical point of view (construction by semidirect products), it is compatible with the SHTC hyperbolic evolution, and it is advantageous when making projection to less detailed state variables by forgetting D or B, see below, for instance, in Sections 3.10.5 and 3.10.6. 3.10.4.5 Transformation rules Consider Galilean transformation of coordinates r = r + Vt ,
(3.262)
which means the, in the particular case of V = (V x > 0, 0, 0), the primed observer moves in the positive direction of the x-axis. Transformations of the electromagnetic can be derived from the Lorentz transformation of the four-tensor of the electromagnetic field as in [58] and [60], 1 V×H c2 1 B = B + 2 V × E c
D = D −
(3.263a) (3.263b)
and E = E − V × B
H = H +V×D.
(3.263c) (3.263d)
The latter rules can be seen as a consequence of the transformation from the mass momentum to the total momentum above. Note that the relativistic γ factors were neglected, since we do not intend to take into account velocities comparable to the speed of light. These transformation rules are the same as in [59].
122 | 3 Hamiltonian mechanics
Polarization and magnetization were defined in Equations (3.239). Using rules (3.263), the definitions (3.239) transform to the same definitions in the primed coordinate system. EXERCISE: Transformation of polarization and magnetization Verify that definitions (3.239) are invariant with respect to transformation (3.263).
3.10.5 Magnetohydrodynamics When the electric field in a system evolves much faster than the magnetic field, it makes sense to formulate evolution of the system in terms of variables (ρ, m, s, B). When functionals in Poisson bracket (3.258) depend only on these state variables, the bracket turns into the magnetohydrodynamic Poisson bracket {F, G}(MHD) = {F, G}(FM) + ∫ dr B i (G m j ∂ j F B i − F m j ∂ j G B i ) + ∫ dr ∂ j B j (F m i G B i − G m i F B i ) + ∫ dr (F m i B j ∂ j G B i − G m i B j ∂ j F B i ) .
(3.264)
Note that this bracket can be further simplified by Equations (3.233f), but again the Jacobi identity is satisfied unconditionally only without the simplification. Evolution equations implied by this Poisson bracket are ∂ρ = − div(ρEm ) ∂t ∂m i ρ∂ i E ρ − m j ∂ i E m j − s∂ i E s − B j ∂ i E B j + ∂ j (B j E B i ) = −∂ j (m i E m j ) − ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂t
(3.265a) (3.265b)
= −∂ i p (MHD)
∂s = − div (sEm ) ∂t ∂B i = −∂ j (B i E m j − E m i B j ) − E m i ∂ j B j . ∂t
(3.265c) (3.265d)
These equations are supplemented with div B = 0.
3.10.6 Electrohydrodynamics In analogy with in Section 3.10.5, the magnetic field can be the quickly relaxing variable in a physical system. Evolution of the system can then be formulated in terms of variables (ρ, m, s, D). When functionals in Poisson bracket (3.258) depend only on
3.10 Electromagnetic field | 123
these state variables, the bracket turns into the electrohydrodynamic Poisson bracket {F, G}(EHD) = {F, G}(FM) − ∫ dr D i (F m j ∂ j G D i − G m j ∂ j F D i ) + ∫ dr ∂ j D j (F m i G D i − G m i F D i ) + ∫ dr (F m i D j ∂ j G D i − G m i D j ∂ j F D i ) .
(3.266)
Note that this bracket can be further simplified by Equations (3.233f), but yet again the Jacobi identity is satisfied unconditionally only without this simplification. ∂ρ = − div(ρEm ) ∂t ∂m i ρ∂ i E ρ − m j ∂ i E m j − s∂ i E s − D j ∂ i E D j + ∂ j (D j E D i ) = −∂ j (m i E m j ) − ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂t
(3.267a) (3.267b)
= −∂ i p (EHD)
∂s = − div (sEm ) ∂t ∂D i = −∂ j (D i E m j − E m i D j ) − E m i ∂ j D j . ∂t These equations are equipped with constraint div D = qρ/m.
(3.267c) (3.267d)
4 Irreversible evolution Reversible evolution can be distinguished from irreversible by considering the behavior of the evolution with respect to the time reversal transformation, which is introduced in the following section.
4.1 Time reversal transformation 4.1.1 Particles Imagine a movie of motion of an isolated system of classical particles obtained by solving Hamilton canonical equations numerically. At one point, we can decide to stop the movie and play it backwards. Momenta of the particles then get inverted and the time stamp goes backwards. This is the time reversal transformation (TRT), TRT
r → r
TRT
and p → −p .
(4.1)
Position is not affected by TRT; it is even with respect to TRT or, equivalently, we say that it has parity equal to one, P(r) = 1. Momentum, however, changes its sign; it is odd with respect to TRT and has parity equal to minus one, P(p) = −1. What do the inverted evolution equations look like? EXERCISE: Imagine Imagine the movie. Would you be able to distinguish the forward and backward movie by comparing two subsequent frames of the movie?
The forward motion was described by Hamilton canonical equations, dr i = H pi dt dpi = −Hri . dt
(4.2a) (4.2b)
The backward motion, which is obtained by the application of TRT, is then described by equations dr i = H−pi dt d(−pi ) = −Hri , − dt −
(4.3a) (4.3b)
where dt = − dt . These equations can be rewritten as the original equations (4.2) just with t replaced with t . The equations are reversible. The forward and backward https://doi.org/10.1515/9783110350951-004
126 | 4 Irreversible evolution
equations are equivalent. Both the forward and backward motions are described by the same evolution equations. When regarding the motion of all particles, it is impossible to distinguish between the forward and backward movie. On the other hand, seeing a collection of particles occupying one half of a vessel whilst also moving into the empty part, the forward and backward movies can be distinguished by common sense. Indeed, once the particles occupy the whole vessel, they will practically never go back into just one half of the vessel. When regarding concentration of particles in each half of the vessel, we can distinguish between the forward and backward movies with this specific initial condition, even though by tracking the exact positions and momenta of all particles we could not distinguish the videos. Evolution of concentrations of particles in the two halves of that vessel, represented by numbers N1 and N2 , can be described by equations dN1 = C(N2 − N1 ) dt dN2 = C(N1 − N2 ) , dt
(4.4a) (4.4b)
which tell us that particles tend to move to the part of the vessel with less particles. Time reversal transformation turns these into evolution equations dN1 = C(N2 − N1 ) dt dN2 − = C(N1 − N2 ) , dt −
(4.5a) (4.5b)
which are different from equations (4.4). This time, the equations are irreversible, which is the reason why we can distinguish between the forward and backward movies. Finally, evolution equations are often partly reversible and partly irreversible; they have their reversible and irreversible parts. Consider for example damped evolution of momentum dp (4.6) = −Hr − ξ p , dt where ξ is a friction constant. TRT turns this equation into −
d(−p) = −Hr + ξ p , dt
(4.7)
dp = −Hr + ξ p . dt
(4.8)
which is equivalent to
The first term of the right hand side is the same as in the original equation – it is the reversible part. The second term changed its sign – it is the irreversible part. By applying TRT, we can split evolution equations into reversible and irreversible parts.
4.1 Time reversal transformation
| 127
4.1.2 General state variables In the preceding section we recalled the concept of parity in terms of behavior of position and momentum with respect to TRT. Let us now extend the definition of time reversal to other state variables. If a variable x i changes its sign under TRT, it is called odd with respect to TRT and has parity equal to −1, P(x i ) = −1. If the variable is left intact by the transformation, it is even with respect to TRT and its parity is one, P(x i ) = 1. In Chapter 3 a hierarchy of levels of description was constructed, which started from the Liouville N-particle distribution function, and continued via Boltzmann distribution function to the variables of fluid mechanics and where less detailed state variables were obtained by projection from more detailed variables. The Liouville distribution function transforms under TRT to the distribution function with inverted momenta, i.e., TRT
f N ((r1 , p1 ), . . . , (rN , pN )) → f N ((r1 , −p1 ), . . . , (r N , −pN )) .
(4.9)
Since the transformed distribution function is neither equal to nor minus the original distribution function, it has no parity with respect to TRT. Can we extend the parity mapping to such situations? The answer is positive; see [61] where TRT is defined geometrically. The behavior of the Liouville distribution function with respect to the TRT will imply behavior of the state variables projected from the distribution function. The very natural concept of TRT on the particle level can be extended to lower (less detailed) levels, e.g., fluid mechanics or heat transport. Consider projection from a level where the action of ↑TRT is known to a lower level. Then it is natural to define the action of TRT on the lower level ↓TRT by the commutative diagram ↓
TRT ∘ projection = projection ∘ (↑ TRT) .
(4.10)
For instance the Boltzmann one-particle distribution function f can be obtained by projection (2.113) from the N-particle distribution function, which means that TRT
f(r, p) →
N 1 ∫ d1 . . . dN ( ∑ δ(i − (r, p))) f N ((r1 , −p1 ), . . . , (r N , −pN )) N! i=1
=
N 1 ∫ d1 . . . dN ( ∑ δ((r i , −pi ) − (r, p))) f N ((r1 , p1 ), . . . , (r N , pN )) N! i=1
=
N 1 ∫ d1 . . . dN ( ∑ δ((r i , pi ) − (r, −p))) f N ((r1 , p1 ), . . . , (r N , pN )) N! i=1
= f(r, −p) .
(4.11)
The first equality represents substitution p i → −p i while the second represents symmetry of the Dirac δ-distribution. TRT reflects the one-particle distribution function
128 | 4 Irreversible evolution
in the momentum coordinate. Behavior of f(r, p) with respect to TRT is obtained from the action of TRT on f N . State variables of fluid mechanics then transform as TRT
ρ(r) → ∫ dp mf(r, −p) = ∫ dp mf(r, p) = ρ(r) TRT
u i (r) → ∫ dp p i f(r, −p) = ∫ dp (−p i )f(r, p) = −u i (r) TRT
s(r) → ∫ dp σ(f(r, −p)) = ∫ dp σ(f(r, p)) = s(r) .
(4.12a) (4.12b) (4.12c)
Density is thus even with respect to TRT; momentum density odd and entropy density even. Behavior of the state variables of fluid mechanics with respect to TRT is obtained from the action of TRT on f(r, p). Similarly we can derive behavior of other state variables. For instance, labels a are even by definition. The distortion matrix is thus also even as well as the left Cauchy– Green (LCG) tensor. Entropic momentum π is odd by definition. Electric displacement is even by definition while vector potential A and magnetic field B are odd.
4.1.3 Parity changes with level So far behavior of state variables has been recalled. But what if a quantity ceases to play the role of a state variable due to its relaxation? Consider for instance the conjugate entropy flux w from Section 3.9, which is clearly odd with respect to TRT. Evolution of this state variable is expressed by an evolution equation of the variable. After the evolution equation has relaxed to a state determined by the other state variables as in Section 5.4, the flux is also determined by the remaining state variables, e.g., given by Fourier’s law w = −k∇T ,
(4.13)
where k is a positive constant and T is temperature. The right hand side of this equation is even with respect to TRT, and so is the left hand side. The conjugate entropy flux, which is odd when playing the role of a state variable, changed its behavior with respect to TRT and became even after the relaxation. Behavior with respect to TRT thus depends on the level of description.
4.1.4 Mass, energy and entropy Inversion of momenta of all particles clearly cannot change total mass of the system. Neither energy (and in particular kinetic energy) of the system is affected by the inversion. Finally, entropy is also required to have this property. Consider for instance a one
4.1 Time reversal transformation
| 129
dimensional system of particles. One can of course decide to relabel the spatial coordinate such that it in turn changes the sign of the momenta. If entropy was affected by TRT, it would decrease after the inversion, and one could exploit this decrease of entropy to construct a perpetual motion machine. Thus mass, energy and entropy are functionals even with respect to TRT. They are not affected by TRT.
4.1.5 Hamiltonian evolution is reversible In Chapter 3 it was shown that kinematics on many levels of description is Hamiltonian, and the Hamiltonian evolution equations of a set of state variables x can be represented by ∂x i δE (4.14) = L ij j , ∂t δx where L is the Poisson bivector and E(x) total energy. Note that the summation over repeated indexes can be interpreted as integration over space or phase space. Is this Hamiltonian evolution reversible in the sense of TRT? Assume that all state variables have definite parities P(x i ) as well as the Poisson bivector. TRT then transforms the equation δE δE ∂x i ∂P(x i )x i = −P(x i ) = P(L ij )L ij = P(L ij )P(x j )L ij j . j j ∂−t ∂t δP(x )x δx
(4.15)
Multiplying this equation by −P(x i ) leads to δE ∂x i = −P(x i )P(L ij )P(x j )L ij j , ∂t δx
(4.16)
which is the equivalent to (4.14) if and only if P(x i )P(L ij )P(x j ) = −1 .
(4.17)
This is the condition necessary for the Hamiltonian evolution to be reversible with respect to TRT. EXERCISE: Check the reversibility Check that the Poisson bivector of fluid mechanics from Section 3.7.5 fulfills condition (4.17).
It was demonstrated in Chapter 3 that Poisson brackets on different levels of description are usually related by a projection. Consider a detailed (upper level) Poisson bracket, or rather the corresponding Poisson bivector ↑L(x), which fulfills condition (4.17) and consequently generates reversible evolution. If the projection y(x) defines less detailed (lower) Hamiltonian kinematics, the lower Poisson bivector ↓L(y) is defined by Equation (3.94), i.e., ↓ ab
L (y) =
δy a ↑ ij δy b L (x) j . δx i δx
(4.18)
130 | 4 Irreversible evolution
Parity of the lower Poisson bivector is then P(↓L ab ) = P(y a )P(x i )P(↑L ij )P(x j )P(y b ) = −P(y a )P(y b ) ,
(4.19)
and the lower Poisson bivector thus also fulfills condition (4.17). A Poisson bivector obtained by a projection of a Poisson bivector satisfying condition (4.17) also fulfills the condition. In other words, Hamiltonian evolution given by projection of a reversible Hamiltonian evolution is also reversible.
4.1.6 Irreversible evolution equations Evolution equations consist in general of reversible and irreversible parts. Assume that a (partial) time derivative of the state variable, evolution of which the equation expresses, is on the left hand side while the rest of the equation is on the right hand side. The reversible part of the evolution equation is then defined as the part of the right hand side that transforms under TRT to the left hand side. On the other hand, the irreversible part transforms as minus the left hand side under TRT. Let us now focus on the irreversible part of evolution equations. Unlike in the case of Hamiltonian evolution, there is no standard way to construct the irreversible evolution. One actually has the freedom to write down irreversible evolution in any form if the following requirements are satisfied: 1. The irreversible terms are indeed irreversible in the sense of TRT. 2. Entropy grows due to the irreversible terms until thermodynamic equilibrium is reached. 3. There is no evolution in thermodynamic equilibrium. 4. Total mass is conserved. 5. Total energy is conserved. 6. Angular momentum is conserved. 7. Onsager–Casimir reciprocal relations (Section 5.2) are satisfied close to equilibrium. 8. The equations are Galilean invariant. Irreversible evolution is discussed in detail later within this chapter.
4.1.7 Dissipation Dissipation is a term closely related to irreversibility. By dissipative terms we mean terms in evolution equations that raise entropy. In the whole book irreversible terms will be constructed in such a way that they are also dissipative, and they will satisfy the second law of thermodynamics, i.e., that entropy of each isolated system grows until it reaches thermodynamic equilibrium.
4.2 Why MaxEnt? | 131
In Chapter 3 Hamiltonian evolution on many levels of descriptions was formulated. Total entropy was always a Casimir of the underlying Poisson bracket, which means that total entropy is not changed by Hamiltonian evolution regardless the choice of energy. Hamiltonian evolution is thus nondissipative.
4.2 Why MaxEnt? In Section 2.7 the principle of maximum entropy (MaxEnt) was introduced. Since entropy can be thought of as uncertainty, maximization of entropy was motivated by maximization of the uncertainty, i.e., making the least biased estimates. Indeed, if uncertainty is maximized, the least subjective knowledge is inserted into the estimate. If one has to estimate the value of a state variable based on some knowledge, the value that maximizes the entropy is the least biased estimate. Therefore, if any another estimate was used, additional knowledge would be inserted into the estimate meaning that the knowledge should have been explicitly declared prior making the estimate. That is the static reason for MaxEnt. Let us now seek a dynamical one. The second law of thermodynamics (postponing its own discussion to the next section) tells us that entropy grows until equilibrium is reached. Consider a nonequilibrium level of description (A) that is appropriate for a system at a given initial time. Evolution equations for the system are partly reversible and partly dissipative. Before the system reaches complete thermodynamic equilibrium, it typically passes through more macroscopic (lower) levels of description, where the system behaves according to autonomous evolution equations for more macroscopic state variables. A quasiequilibrium level of description (B) is reached. State variables of level (B) are usually related to the state variables of level (A) by a projection, which typically can be rewritten as a relaxation of one or more fast state variables of level (A). Therefore, the evolution on level (B) can be called reduced evolution while the evolution of (A) towards (B) reducing evolution. Entropy is produced during the reducing evolution due to the dissipativity of the evolution equations on level (A). Assuming timescale separation of the reduced and reducing evolutions, entropy is maximized during the reducing evolution subject to the constraint that the reduced state variables (of level (B)) are kept constant. The reducing evolution thus dynamically approaches the MaxEnt values of the fast state variables, and the second law of thermodynamics can be seen as a dynamical reason for MaxEnt. However, the fast variables usually do not end up exactly at the corresponding MaxEnt values; they rather stay in the vicinity of the values. This is because the reduced evolution (on level (B)) is not static and dynamically changes the basin of attraction for the fast state variables. The dissipative terms corresponding to the fast variables on level (A) typically vanish at the exact MaxEnt values of these state variables.
132 | 4 Irreversible evolution
But since the fast state variables are not exactly at the MaxEnt values, the dissipation does not vanish and level (B) continues to dissipate until complete thermodynamic equilibrium is reached. This is for instance the case of the Boltzmann equation, where the Boltzmann collision integral (4.84) plays the role of dissipation. The collision integral vanishes for locally Maxwellian distribution functions (2.123), which are the MaxEnt values based on the knowledge of the hydrodynamic fields (ρ, u, ε). If the distribution function were locally Maxwellian, the dissipation would disappear. But the hydrodynamic fields, evolution of which is generated also by the reversible part of Boltzmann equation (3.101), keep changing and therefore the distribution function also keeps approaching the locally Maxwellian values, albeit never reaching them except during complete thermodynamic equilibrium. The Boltzmann equation tends to the MaxEnt values of the distribution function based on the hydrodynamic fields, but never reaches the values exactly. Evolution equations of the hydrodynamic fields, which are partly generated by the reversible part of Boltzmann equation and partly by the collision integral, thus keep some dissipative terms (Navier–Stokes dissipation as in Section 4.6.2.2). In summary, MaxEnt gives the basin of attraction for the detailed state variables. Dissipativity of evolution on the detailed level (A) forces the state variables towards the basin, and the second law of thermodynamics can be regarded as a dynamical reason for MaxEnt.
4.3 On the origin of the second law Hamilton canonical equations are reversible dynamics. Similarly, the Liouville equation is reversible (and purely Hamiltonian), and Liouville entropy is not changed during the evolution (entropy is a Casimir of the Liouville Poisson bracket). On the other hand, the second law of thermodynamics requires that entropy grows until thermodynamic equilibrium is reached. How can dynamical systems described by Liouville equations approach thermodynamic equilibrium while keeping the Liouville entropy constant? This interesting question was raised in the case of the Vlasov equation (3.103) by C. Villani and C. Mouhot in [62, 63]. The Vlasov equation is reversible (and Hamiltonian) and Boltzmann entropy is a Casimir of the Boltzmann Poisson bracket, which generates the Vlasov equation. Boltzmann entropy is thus strictly conserved. It was proved mathematically that solutions to the Vlasov equation gradually become highly irregular in the dependence of f(t, r, p) on the p coordinate, but averaged quantities like mass density in Equations (2.121) approach spatially homogeneous states (ρ(r) independent of r). This is the phenomenon of Landau damping, which can be regarded as a sort of approach to equilibrium without any change of the Boltzmann entropy; see also [64] or [65].
4.4 Entropic representation |
133
A way to reconcile Landau damping with thermodynamics is to find an entropy that grows. And indeed the hydrodynamic entropy (2.126) grows in time although the Boltzmann entropy is conserved; see [66] Solutions to the Vlasov equation approach spatially homogeneous states in a weak sense (in averages). Boltzmann entropy is conserved, but the hydrodynamic entropy grows. This multiscale phenomenon could be behind the second law of thermodynamics. Another way to see the dissipation behind Landau damping is to construct a regularization of the Vlasov equation by means of more microscopic dynamics [67]. EXERCISE: Open problem This is actually not an exercise, but rather a research proposal. If the same behavior as in the case of Vlasov equation is shown for the Liouville equation, which is the N dimensional analogue of the Vlasov equation, the second law of thermodynamics would be proven on levels of description more macroscopic than the Liouville level.
4.4 Entropic representation Irreversible evolution is responsible for the growth of entropy. Therefore, to specify the irreversible evolution explicitly, it is necessary to express entropy as a functional of state variables, S(x). Derivatives of entropy with respect to the state variables are then referred to as the conjugate variables in the entropic representation, x∗ =
δS . δx
(4.20)
We have actually already encountered the conjugate variables in many places in Section 2.7 when carrying out the entropy maximization from one level to another. Entropic conjugate variables are typically (as in classical irreversible thermodynamics, e.g., Fourier heat law of Fick’s diffusion law) the driving forces towards thermodynamic equilibrium but we postpone the discussion of this observation to Section 4.4.3. An important consequence is, however, that x∗ = 0 corresponds to equilibrium. Let us now use them in a general framework leading to irreversible equations: gradient dynamics.
4.4.1 Gradient dynamics In order to fulfill all the criteria listed in Section 4.1.6, it is advantageous to work within a framework that automatically satisfies at least some of them. The framework invoked in this book is called gradient dynamics, where the irreversible terms are roughly speaking derivatives of a dissipation potential.
134 | 4 Irreversible evolution
Consider a set of state variables x, and let energy, entropy and mass of the system be denoted by E(x), S(x) and M(x). A dissipation potential Ξ(x∗ ) is a functional of conjugate state variables that fulfills the following criteria: 1. Positiveness: Ξ(x, x∗ ) ≥ 0 and Ξ|x∗ =0 = 0. 2. Monotonicity of derivative: ⟨Ξx∗ , x∗ ⟩ ≥ 0 ∀x∗ . 3. Convexity near the origin, i.e., near x∗ = 0. 4. Degeneracy with respect to mass: ⟨Ξx∗ |x∗ , Mx ⟩ = 0 ∀x∗ . 5. Degeneracy with respect to energy: ⟨Ξx∗ |x∗ , Ex ⟩ = 0 ∀x∗ . 6.
TRT
Behavior with respect to TRT: Ξ(x, x∗ ) → Ξ(x, x∗ ), i.e., Ξ is even with respect to TRT.
Then irreversible dynamics of the state variables can be constructed as (x)̇ irr =
δΞ . δx∗ x∗ =Sx
(4.21)
The first criterion implies that the dissipation potential vanishes in thermodynamic equilibrium x∗ = 0. The second criterion ensures the second law of thermodynamics, i.e., that entropy grows δS δΞ ̇ = ⟨x∗ , ∗ ⟩ ≥ 0 . Ṡ = {S, E} +(S)̇ irr = (⟨ , x⟩) ⏟⏟⏟⏟⏟⏟⏟⏟⏟ δx δx irr =0
(4.22)
If the dissipation potential is convex everywhere, its derivative is a monotone operator, which ensures the required inequality; see e.g., [68]. The third property expresses the (local) stability of thermodynamic equilibrium, as from δΞ δ(K/2)(x∗ )2 ẋ = rev + ∗ ≈ rev + , (4.23) δx δx∗ i.e., Ξ ≈ 1/2K(x∗ )2 , we approximate the irreversible evolution controlling the stability behavior to be ẋ = K
δS ≈ K [S (xeq ) + S (xeq )(x − xeq )] = KS (xeq )(x − xeq ) , δx
(4.24)
where we used the fact that entropy is an even function and that entropy at the equilibrium x = xeq being characterized by ẋ = 0 attains a zero value in the expansion due to ẋ = 0 = S(xeq ). Finally, the evolution to equilibrium can be appreciated from its solution x(t) − xeq = exp (KS (xeq )t) ⋅ (x(0) − xeq ) , (4.25) which decays to zero as KS (xeq ) < 0 due to entropy and dissipation potential (K > 0) convexity and concavity of entropy. The fourth and fifth criteria give conservation of mass and energy δE Ė = {E, E} + ⟨ , Ξx∗ ⟩ . δx ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ =0
=0
(4.26)
4.4 Entropic representation |
135
Finally the sixth criterion implies that the evolution equations generated by the dissipation potential become irreversible with respect to TRT, making the separation into the reversible and irreversible parts unambiguous. The simplest and perhaps most frequent choice of dissipation potential is quadratic, 1 Ξ = x∗i M ij (x)x∗j , (4.27) 2 where the operator M ij is referred to as the dissipative matrix. The dissipative matrix is symmetric (due to property 1 and 3 of Ξ) and is required to be positive semidefinite (property 1 and 2). Note that summation over the repeated indexes can sometimes take the form of an integration over space or phase space. Irreversible dynamics (4.21) then becomes (ẋ i )irr = M ij x∗j |x∗ =Sx , (4.28) which can also be written as
̇ (A(x)) irr = [A, S] ,
(4.29)
where [∙, ∙] = ⟨∙, M∙⟩ is called the dissipative bracket. Moreover, the dissipation matrix has to be degenerate in the sense that M x i M ij = 0
and
E x i M ij = 0
(4.30)
so that mass and energy are conserved. Finally, assuming that all state variables x have definite parity with respect to TRT, parity of the dissipative matrix has to be P(M ij ) = P(x i )P(x j )
(4.31)
so that the corresponding dissipation potential (4.27) is even with respect to TRT. See for instance [69] for more details on dissipative brackets (even nonsymmetric ones but where the uniqueness of separation into reversible and irreversible parts is lost). Note that sometimes the evolution generated by a quadratic dissipation potential is referred to as gradient dynamics while the case of generally nonquadratic dissipation potential is called generalized gradient dynamics. EXERCISE: Irreversibility and dissipative matrix Prove that equations (4.28) are irreversible with respect to TRT provided condition (4.31) is satisfied.
Gradient dynamics can also be equipped with a positive prefactor, typically the inverse temperature e∗ , so that δΞ . (4.32) (x)̇ irr = e∗ ∗ δx x∗ =S x None of the properties of gradient dynamics are affected by the prefactor, and in some cases the prefactor makes it easier to find a dissipation potential generating the dynamics.
136 | 4 Irreversible evolution
Gradient dynamics has also been given statistical interpretation in the scope of theory of large deviations [70, 71], where it plays the role of deterministic dynamics generated by averaging probabilistic dynamics. Finally, it is often preferable to identify the conjugate variables as derivatives of the thermodynamic potential (2.20) so that Equation (4.21) becomes (ẋ i )irr = −Ξ x∗i |x∗ =Φ x .
(4.33)
In all examples in this book the two formulations with x∗ = Sx and x∗ = Φx will be equivalent. In particular, in the case of quadratic dissipation potential, equations (4.21) and (4.33) are equivalent automatically due to the degenerations E x i M ij x∗j = 0 = M x i M ij x∗j
(4.34)
required above. States where Φx = 0 then clearly represent the thermodynamic equilibrium considering energy and mass constant.
4.4.2 Isothermal dissipation Consider a system in contact with a large medium with given temperature. Temperature of the system is then often effectively constant (homogeneous) and equal to that of the medium. The system is isothermal. Entropy is the potential generating the irreversible evolution while energy is the functional generating the reversible evolution. Assuming that the dissipation potential is quadratic, the required degeneracies of the Poisson bracket and dissipation potential yield ∀A {A, E − TS} = {A, E} ,
[A, E − TS] = T[A, S]
(4.35)
in the isothermal case, T = const. Energy and entropy can be thus combined into a single functional – the Helmholtz free energy F = E−TS, which can be used as a single generator of the isothermal GENERIC evolution with quadratic dissipation potential, ẋ i = L ij F x j −
1 ij M F xj . T
(4.36)
Moreover, since the system is considered in contact with the large isothermal medium, energy is exchanged with the medium and it does not need to be conserved anymore. The evolution equation for temperature can be obtained from the evolution equation for entropy. Since the temperature is assumed to be constant, the evolution equation of entropy density is effectively suppressed in the isothermal case. In summary, in the isothermal case with quadratic dissipation potential we can use a single generating potential (Helmholtz free energy) for both reversible and irreversible evolutions. The one-generator framework is invoked for instance in [72].
4.4 Entropic representation | 137
4.4.3 Thermodynamic forces and fluxes Entropy is a potential driving the systems towards equilibrium. Therefore, it is natural to interpret derivatives of entropy (entropic conjugate variables x∗ ) as thermodynamic forces X. If the dissipation potential depends for instance on ∇x∗ , instead of the conjugate state variables themselves, it is advantageous to interpret the thermodynamic forces as X = Γ(x∗ ) , (4.37) where Γ is a linear operator. The adjoint operator Γ T is defined through ⟨∙, Γ∙⟩ = ⟨Γ T ∙, ∙⟩. For example, Γ T = − div (spatial divergence) for Γ = ∇. Thermodynamic fluxes J are then defined as derivatives of the dissipation potential with respect to the forces, J = ΞX . (4.38) Derivative of the dissipation potential satisfies δΞ ∗ δΞ δΞ δX ∗ (x ) = ⟨ (y), δ(y − x )⟩ = ⟨ , (y) ⟩ δx∗ δx∗ δX X=Γ(x∗ ) δx∗ y=x∗ δΞ , Γ(y)δ(y − x∗ )⟩ = ⟨ δX X=Γ(y) δΞ , δ(y − x∗ )⟩ , = ⟨Γ T (y) δX X=Γ(y)
(4.39)
which turns the gradient dynamics to δΞ δΞ T (y) = Γ (y) . δx∗ δX X=Γ(y) Entropy production then becomes Ṡ = ⟨x∗ , Ξx∗ ⟩ = ⟨x∗ , Γ T ΞX ⟩ = ⟨X, J⟩ ,
(4.40)
resembling the classical irreversible thermodynamics structure of entropy production, being a product of thermodynamic forces and fluxes. Instead of spatial gradients, different operators Γ can be used to represent forces (and to simplify the calculations). For instance, in the case of collisions of particles, the strongly nonlocal force dependent on positions and momenta of particles before and after the collision X(1, 2, 1 , 2 ) =
1 ∗ (f (1) + f ∗ (2) − f ∗ (1 ) − f ∗ (2 )) kB
plays the role of the driving force in the Boltzmann equation.
(4.41)
138 | 4 Irreversible evolution
The dissipation potential has been expressed in terms of thermodynamic forces X, and the fluxes were derivatives J = ΞX . This relation can be seen as equation 0=
∂ (−Ξ(X) + ⟨X, J⟩) , ∂X
(4.42)
the solution of which is X(J). In other words, the relation J = ΞX can be seen as Legendre transformation of Ξ(X) to the conjugate dissipation potential Ξ∗ (J) = −Ξ(X(J)) + ⟨X(J), J⟩ .
(4.43)
Derivative of the conjugate dissipation potential is then X = Ξ∗J ,
(4.44)
which is often the preferred formulation of dissipative terms, e.g., [73]. Solution to Equation (4.44) J(X) gives the backward Legendre transformation from Ξ∗ to Ξ. We can thus decide to work either with Ξ(X) and obtain fluxes as J = ΞX or with the conjugate dissipation potential Ξ∗ (J) and obtain forces as functions of fluxes X = Ξ∗J . Another method for obtaining thermodynamic fluxes as functions of forces (or vice versa) is the method of entropy production maximization; see [49, 74–76] or [77]. Yet another method essentially equivalent with entropy production maximization is the steepest entropy ascent (SEA) framework [78]. Both these methods are equivalent to gradient dynamics if the dissipation potential depends on only one force or if it is a k-homogeneous (e.g., quadratic is two-homogeneous) function of several forces as shown in [79]. We, however, prefer gradient dynamics, since it leads to reasonable constitutive relations even in the case of nonhomogeneous dissipation potentials.
4.4.4 Maxwell–Onsager reciprocal relations Thermodynamic fluxes are derivatives of the dissipation potential with respect to the thermodynamic forces, Equation (4.38). Therefore, the symmetry of the second derivatives (Schwarz’s theorem) leads to relations (
∂J1 ∂J 2 ) =( ) , ∂X2 X1 ∂X1 X2
(4.45a)
and the change of variables then yields equivalent relations ∂X2 ∂X1 ) =( ) ∂J 2 J 1 ∂J 1 J 2 ∂X2 ∂J 1 ) = −( ) ( ∂J 2 X1 ∂X1 J 2
(
(
∂J 2 ∂X1 ) = −( ) , ∂J 1 X2 ∂X2 J 1
(4.45b) (4.45c) (4.45d)
4.5 Energetic representation | 139
called the Maxwell–Onsager reciprocal relations; see [80]. In particular, relations (4.45a) in the case of quadratic dissipation potential translate to the symmetry of the dissipative matrix.
4.4.5 Quasilinear irreversible evolution We have seen that irreversible equations governed by the dissipative matrix (4.28) are a particular realization of equations generated by a dissipation potential (4.21). Even more general than Equations (4.21) are quasilinear equations (ẋ i )irr = ̃ M ij (x, x∗ )x∗j |x∗ =Sx ,
(4.46)
advocated for instance in [69] or [81]; see also [82]. The matrix (or rather the operã is required to be positive semidefinite in order to fulfill the second law of thermotor) M dynamics. We will, however, prefer gradient dynamics (4.21), since we are not aware of any physical phenomenon for which adoption of Equations (4.46) would be necessary (although some models seem to require the quasilinear equations). If gradient dynamics and the quasilinear equations are identical,
it also holds that
δΞ ̃ M ij x∗j = ∗ , δx i
(4.47)
δ̃ M ij ∗ δ2 Ξ ̃ x = . M ik + δx∗k j δx∗k δx∗i
(4.48)
̃ we have a further i ↔ k symmetry As a consequence for symmetric operators M, δ̃ M ij δ ̃ M kj , ∗ = δx k δx∗i
(4.49)
due to the symmetry of the second derivatives of dissipation potential Ξ. This is the necessary condition for the gradient dynamics and quasilinear dynamics to be com̃ is symmetric and independent of x∗ , this condition is satpatible. If, for instance, M isfied because both derivatives vanish and the quasilinear dynamics becomes equivalent to the dynamics generated by the dissipative matrix (4.28).
4.5 Energetic representation In the energetic representation the conjugate variables are identified as derivatives of total energy, δE . (4.50) x† = δx
140 | 4 Irreversible evolution
Since it is often easier to write down irreversible evolution in the energetic representation as we shall see in the examples below, let us show the relations between the entropic and energetic representations. We assume that one of the state variables in the energetic representation is entropy density (per volume) s(r) and the set of state variables is thus (ξ , s). Similarly, one of the state variables in the entropic representation is required to be the total energy density (also per volume) e(r), and the state variables are thus (ξ , e). Energy and entropy can then be expressed as E = ∫ dr e(r) = E(ξ , s)
and
S = ∫ dr s(r) = S(ξ , e) .
(4.51)
Moreover, the dependencies s(ξ , e) and e(ξ , s) are supposed to be algebraic, i.e., not involving any gradients or another nonlocal operators. Derivatives of energy then become −1
( (
∂e ∂s ) = (( ) ) ∂s ξ ∂e ξ
,(
δE δS ) = (( ) ) δs ξ δe ξ
−1
,
∂(E, s) ∂(ξ j , e) δE ∂(E, s) = ) = i i δξ s ∂(ξ , s) ∂(ξ j , e) ∂(ξ i , s) ∂e ∂s ∂e ∂s = − ( j ) δ ij ( ) = − ( i ) ( ) , ∂s ∂ξ e ∂ξ e ∂s ξ ξ
(4.52a)
(4.52b)
where the Landau formalism from Appendix A.1 was used. These equations can be rewritten as ξ j∗ s† = (e∗ )−1 and ξ j† = − ∗ . (4.53) e Derivatives of these relations are ( (
δξ i† ) δξ j∗
=− e∗
δ ij = −s† δ ij , e∗
δs† ) =0, δξ i∗ e∗
( (
δξ i† ) δe∗
= ξ∗
ξ i∗ (e∗ )2
δs† 1 ) =− ∗ 2 . δe∗ ξ ∗ (e )
(4.54a) (4.54b)
We are now equipped with the transformation rules from entropic conjugate variables to energetic conjugate variables.
4.5.1 Local gradient dynamics Gradient dynamics (4.21) is generated by derivatives of a dissipation potential with respect to ξ ∗ and e∗ . Assuming that the dependence of the dissipation potential on the conjugate variables is algebraic (i.e., local as in Section 4.6.1), the above relations
4.5 Energetic representation |
141
lead to the following expressions in the energetic representation: (
δξ j† δΞ δΞ = ) ) ( ( ∗) δξ i∗ e∗ δξ † † δξ i j
= −s† (
s
δΞ δξ i†
=
s
e∗
)
(4.55a) s†
δξ j† δΞ δΞ ( ∗) = ( †) ( ∗) δe ξ ∗ δe δξ † j
δs† δΞ ) ( ∗) † † δs ξ δξ i e∗
+(
δΞ δs† ) ( ) δs† ξ † δe∗ ξ ∗
+( ξ∗
1 δΞ δΞ (− ( † ) + ξ i∗ ( † ) ) δs ξ † (e∗ )2 δξ i † s
= −s† (s† (
δΞ δΞ ) + ξ i† ( † ) ) . δs† ξ † δξ † i
(4.55b)
s
In order to conserve energy the derivative Ξ e∗ must vanish (due to the assumed algebraic Ξ), which yields the degeneracy 0 = s† (
δΞ δΞ ) + ξ i† ( † ) δs† ξ † δξ i
.
(4.56)
s†
This condition is fulfilled for instance when the dissipation potential is a zerohomogeneous function of (ξ † , s† ). The dissipation potential is thus required to be a function of fractions ξ † /s† and due to Equation (4.53) only function of ξ ∗ , not e∗ . Gradient dynamics of state variable ξ i is then (∂ t ξ i )irr = Ξ ξ i∗ |ξ ∗ =Sx = −s† (
δΞ δξ i†
)
,
(4.57a)
s†
and irreversible evolution of entropy (entropy production) becomes (∂ t s)irr = (
∂s ∂s ) (∂ t ξ i )irr + ( ) ⋅ 0 ∂e ξ ∂ξ i e
= (ξ i∗ Ξ ξ i∗ ) |ξ ∗ =Sx = ξ i† (
δΞ δξ i†
)
≥0.
(4.57b)
s†
The irreversible term on the right hand side of this last equation is entropy production. Energy is thus conserved while entropy produced. In addition, it cannot be expected to have simple gradient structure in the energetic representation unlike in the entropic representation. Equations (4.57) will play a fundamental role when formulating irreversible evolution later in this book.
142 | 4 Irreversible evolution
4.6 Examples 4.6.1 Local dissipation A dissipation potential depends on the conjugate state variables x∗ . The simplest dependence is algebraic Ξ = ∫ dr ψ(x∗ )
δΞ ∂ψ , ∗ = δx i ∂x∗i
⇒
(4.58)
where ψ is a real-valued function of several real variables. The dissipation potential then depends only on the local values of the conjugate fields. As a particular example consider a quadratic algebraic dissipation potential Ξ = ∫ dr
† † 1 ξ i ij ξ j 1 ∗ ij ∗ M , x i M x j , = ∫ dr 2 2 s† s†
which has derivatives Ξ ξ † = M ij
ξ j†
.
(4.60)
Eξ j Es
(4.61a)
(s† )2 The irreversible evolution equations are then i
(∂ t ξ i )irr = −M ij (∂ t s)irr =
ξ j† s†
ξ i† M ij
= −M ij ξ j†
(s† )2
=
(4.59)
1 E ξ i M ij E ξ j (E s )2
(4.61b)
in the energetic representation (4.57). In the entropic representation the evolution equations are (∂ t ξ i )irr = M ij ξ j∗ = M ij S ξ j (∂ t e)irr = 0 .
(4.62a) (4.62b)
Algebraic dissipation potentials are particularly useful when the reversible evolution equations are hyperbolic, since the irreversible evolution then does not affect hyperbolicity of the overall equations as in the SHTC (Symmetric Hyperbolic Thermodynamically Compatible) framework in Section 5.8.
4.6.2 Weakly nonlocal dissipation Weakly nonlocal dependence can be achieved when, for example, the dissipation potential depends also on spatial gradients of the conjugate field variables, Ξ = ∫ dr ψ(x∗ , ∇x∗ )
⇒
δΞ ∂ψ ∂ψ , ∗ = ∗ −∇⋅ δx i ∂x i ∂∇x∗i
where the dependence on ∇x∗ is pointed out explicitly.
(4.63)
4.6 Examples | 143
4.6.2.1 Fourier law For instance, the evolution equation for energy density e(r) with the Fourier law can be obtained as ∂e δΞ(F) = −∇ ⋅ (λT 2 ∇e∗ ) = ∇ ⋅ (λ∇T) (4.64) = ∂t δe∗ for 1 Ξ(F) = ∫ dr λT 2 (∇e∗ )2 . (4.65) 2 Note that the (nonequilibrium) temperature T is defined as S e . The evolution equation for entropy density becomes (using Equation (4.64)) ∂e 1 ∂s 1 = e∗ = − † ∇ ⋅ (λT 2 ∇ † ) † ∂t ∂t s s s =T λ∇T λ = −∇ ⋅ (− ) + 2 (∇T)2 . T T
(4.66)
The first term on the right hand side is divergence of entropy flux while the second is entropy production density. 4.6.2.2 Navier–Stokes dissipation Consider the state variables of fluid mechanics in the entropic representation (ρ, u, e) where e is the total energy density. Further let us denote ε = e − u2 /2ρ. Entropy as a function of the total energy (the former case) will be denoted without a tilde, while when a function of internal energy (the latter case) with a tilde. We assume, as before, ̃ ϵ). The conjugate variables in the former case the structure of entropy to be S̃ = S(ρ, ∗ will be denoted with a star, e.g., u i = (∂S/∂u i )ρ,e , while in the latter case with a tilde star, e.g., u ∗i ̃ = (∂S/∂u i )ρ,ε . Due to the structure of entropy we have ∂ S̃ 1 ∂S ) =( ) = ∂e ρ,u ∂ε ρ,u T
(4.67)
∂S ∂ S̃ v ) = ( ) (−u/ρ) = − ∂u ρ,e ∂ε ρ,u T
(4.68)
∂ S̃ ) =0. ∂u ρ,ε
(4.69)
( and ( while
(
Because the choice of state variables ρ, u, ε yields simpler conjugate variables and hence has a prospect of simplifying the discussion of form of dissipation potential, we shall proceed in this setting. We aim to construct a dissipation potential that is linked to viscosity, hence to the symmetric velocity gradient 1 D ij = (∂ j v i + ∂ i v j ) (4.70) 2
144 | 4 Irreversible evolution
and its conjugate counterparts vj vi 1 1 (∂ j u ∗i + ∂ i u ∗j ) = − (∂ j + ∂ j ) , 2 2 T T 1 ∗̃ ∗̃ ∗̃ D ij = (∂ j u i + ∂ i u j ) = 0 , 2 D∗ij =
(4.71) (4.72)
which is zero given the choice of state variables. The natural choice of dissipation potential as a function of D∗̃ does not yield anything. Therefore, we need to use conjugate variables ρ ∗̃ , ε∗̃ in combination with the direct velocity gradient D to capture the effect of viscosity. The dissipation potential has to be a scalar quantity even with respect to time reversal transformation, and hence the matrix D has to be present in even powers with square being the lowest and dominant order. Further it has to satisfy the degeneracy requirement leading to energy conservation. We choose 2 ̃ Ξ̃ (D) = ∫ dr μ(ρ, ε) (ε∗̃ D) ,
(4.73)
which is equivalent to the choice 2 1 ̃ Ξ(D) = ∫ dr μ(ρ, ε) ( (v i ∂ j e∗ + v j ∂ i e∗ ) + D∗ij ) , 2
(4.74)
in the entropic representation as a direct comparison with Equation (4.71) reveals. This dissipation potential depends only on gradients of e∗ and thus energy is conserved in gradient dynamics generated by the dissipation potential. The above choice of dissipation potential expresses shear viscosity¹. Similarly, the dissipation potential expressing bulk viscosity is 2 Ξ̃ (div) = ∫ dr ζ ̃ (ρ, ε) (ε∗̃ div v) ,
or
(4.75)
Ξ(div) = ∫ dr ζ ̃ (ρ, ε) (v ⋅ ∇e∗ + div u∗ ) , 2
(4.76)
and the full dissipation potential becomes Ξ(NS) = Ξ(D) + Ξ(div) .
(4.77)
Gradient dynamics (4.21) with dissipation potential (4.77) generates irreversible evolution (
∂u i ∂Ξ(NS) = ∂ j (μ(∂ i v j + ∂ j v i )) + ∂ i (2ζ div v) , ) = ∂t irr ∂u ∗i
(4.78a)
∂e ∂Ξ(NS) = −∂ j (−2μD ij v j ) − ∂ i (−2ζ div vv i ) , ) = ∂t irr ∂e∗
(4.78b)
(
1 Strictly speaking, shear viscosity should be represented by a traceless symmetric gradient of velocity, but then the trace contributes also to the bulk viscosity resulting in a simple renaming of the viscosity parameters defined here.
4.6 Examples |
145
̃ and ζ = ζ ̃ /T are the shear and volume viscosities. The right hand side where μ = μ/T of the evolution equation for momentum density is the divergence of the irreversible part of the Newtonian Cauchy stress tensor (NS)
Tirr
= 2μD + 2ζ div vI .
(4.79)
Irreversible evolution of internal energy density ε is then given by (
∂e u ∂u ∂ε ) = ( ) − ( ) = 2μ(D)2 + 2ζ(div v)2 , ∂t irr ∂t irr ρ ∂t irr
(4.80)
and irreversible evolution of entropy is thus (
∂ε ∂s 1 ∂s ) = ( ) ( ) = (2μ(D)2 + 2ζ(div v)2 ) ≥ 0 . ∂t irr ∂ε ρ ∂t irr T
(4.81)
Assuming constant μ and ζ , the evolution equations (4.78) become ∂u = μ∆v + (2ζ + μ)∇ div v ∂t ∂e (NS) = − div (−Tirr ⋅ v) , ∂t
(4.82) (4.83)
which represent the irreversible part of the Navier–Stokes equations; see e.g., [32]. When adding dissipation potential (4.77) with the Fourier dissipation potential (4.65), the irreversible part of the Navier–Stokes–Fourier equation is restored.
4.6.3 Strongly nonlocal dissipation. Boltzmann collision integral Strongly nonlocal dependence on the fields is achieved for instance by Ξ(B) (f, f ∗ ) = ∫ d1 ∫ d1 ∫ d2 ∫ d2 W(f; 1, 1 , 2, 2 ) (e
X(1,2,1 ,2 ) 2
+ e−
X(1,2,1 ,2 ) 2
− 2) ,
(4.84) where strongly nonlocal thermodynamic force X(f ∗ ) is defined by Equation (4.41). Note that for example 1 stands for position and momentum (r1 , p1 ). The force has the following symmetries: X(1, 2, 1 , 2 ) = X(2, 1, 1 , 2 ) = X(1, 2, 2 , 1 ) = −X(1 , 2 , 1, 2) .
(4.85)
From these symmetries and the definition of the dissipation potential (4.84), it follows that the following symmetries of the collision kernel W can be required without loss of generality: W(1, 2, 1 , 2 ) = W(2, 1, 1 , 2 ) = W(1, 2, 2 , 1 ) = W(1 , 2 , 1, 2) .
(4.86)
Moreover, since the collisions are assumed to be local in space, the collision kernel is zero if all the participating particles do not have the same position in space. The spatial dependence of the collision kernel is thus the product of delta distributions, ̂ p1 , p2 , p1 , p2 ) . W(f; 1, 2, 1 , 2 ) = δ(r1 − r2 )δ(r1 − r2 )δ(r1 − r1 )W(f;
(4.87)
146 | 4 Irreversible evolution
Dissipation potential (4.84) will generate the dissipative part of the Boltzmann equation in Section 5.6.1. One can check that this dissipation potential indeed satisfies the properties 1–3 and 6 due to the hyperbolic cosine and W being independent of the conjugate variables. The degeneracy requirements yielding conservation of energy and mass are satisfied via an appropriate choice of function W once energy potential is specified.
5 Reversible and irreversible evolution 5.1 GENERIC In Chapter 3 reversible evolution on many levels of description was shown to be Hamiltonian, i.e., generated by a Poisson bracket and energy. On the other hand, irreversible evolution was formulated in Chapter 4 by means of gradient dynamics generated by a dissipation potential and entropy. Both these types of evolution can be combined into a single set of evolution equations ẋ i = L ij E x j +
δΞ , ∗ δx i x∗ =S
(5.1)
x
called the general equation for nonequilibrium reversible-irreversible coupling (GENERIC). The acronym first appeared in [47] and [48]. The equation itself, however, has a longer history. Time evolution equations involving both the Hamiltonian and the gradient part first appeared in [83], in [84] (presented at the AMS-IMS-SIAM Joint Summer Research Conference in the Mathematical Sciences on Fluids and Plasmas: Geometry and Dynamics, held at the University of Colorado, Boulder, CO, USA, 17–23 July 1983), and in [85, 86]. Gradient evolution was developed for instance in [87] and [88]. GENERIC was already summarized in [69].
5.1.1 Reversible and irreversible evolution equations The Poisson bivector L ij in Equation (5.1) is an antisymmetric operator satisfying condition (4.17) so that it generates reversible evolution. Moreover, the corresponding Poisson bracket, {F, G} = ⟨F x i , L ij G x j ⟩, satisfies the Jacobi identity (3.5), and entropy S(x) is a Casimir of the bracket, i.e., {F, S} = 0 ∀F(x). The reversible part of GENERIC is Hamiltonian. The dissipation potential is even with respect to time reversal transformation (TRT), which means in the quadratic case (4.27) that the dissipative matrix satisfies condition (4.31), so that it generates irreversible evolution. We refer to irreversible evolution generated by a dissipation potential as gradient dynamics. Moreover, the irreversible evolution is required not to change total energy and total mass. On the other hand, entropy is required to be raised by the irreversible evolution. The irreversible part of GENERIC is gradient dynamics. In the case of quadratic potential (4.27), the irreversible evolution is given by Equation (4.28), and GENERIC (5.1) becomes ẋ i = L ij E x j + M ij S x j . https://doi.org/10.1515/9783110350951-005
(5.2)
148 | 5 Reversible and irreversible evolution
Degenerations (4.34) and degenerations of the Poisson bracket (3.24) then make it possible to rewrite this equation as ẋ i = (T0 L ij − M ij )Φ x j .
(5.3)
The formulation with Φ instead of S is more convenient for instance when considering the geometrical structure of GENERIC in Chapter 7.
5.1.2 Infinite dimensions In mesoscopic theories the state variable x is typically a collection of fields (as it is in fluid mechanics) or a distribution function (as it is in the kinetic theory). This is because x characterizes only a part (the part that directly interests us) of the full microscopic state characterization. The interesting part is often of statistical nature and thus it is expressed in terms of a distribution function. Moments of the distribution function are typically the other fields. The state space M is thus typically infinite dimensional. This means that the mathematically rigorous discussion has to include many elements that are not needed in the case when M is a finite dimensional space (as in classical mechanics or particles). In particular, we have to choose in the rigorous analysis a topology that gives a precise meaning to the notion of a limit and is thus also essential for a rigorous use of the calculus. From the physical point of view, these extra requirements could play the role of additional tools that can be used to express the physics involved. This type of interaction of physics and mathematics is however not yet much developed. There are only a few particular realizations of (5.1) with infinite dimensional spaces M for which the questions arising in the mathematically rigorous analysis have been addressed, for instance [62].
5.1.3 Lyapunov function GENERIC is a structure of the time evolution equation describing the approach from one level of description to a less detailed level. From the mathematical point of view, the structure is the one appearing in the Lyapunov theorem. The Lyapunov function is physically interpreted as the entropy (or a related thermodynamic potential) and the Lyapunov geometrical structure is a metriplectic structure (i.e., a combination of symplectic and metric structures) obeying certain degeneracy requirements. The Lyapunov theorem (or Boltzmann’s H theorem in the particular case of the Boltzmann time evolution) is the essence of GENERIC.
5.2 Onsager–Casimir reciprocal relations |
149
5.2 Onsager–Casimir reciprocal relations Consider evolution equations ẋ i = K ij Φ x j ,
(5.4)
where K ij is a matrix or an operator on the fields of state variables (as matrices L ij and M ij from Equation (5.3)). Onsager–Casimir reciprocal relations (OCRR) [32, 89– 91] state that variables with the same parities with respect to TRT are coupled with a symmetric matrix, while variables with opposite parities are coupled with an antisymmetric matrix when simultaneously inverting the magnetic field. It means that K ij (B) = K ji (−B) ij
ji
K (B) = −K (−B)
for for
P(x i ) = P(x j ) i
j
P(x ) = −P(x ) .
(5.5a) (5.5b)
These are the classical Onsager–Casimir reciprocal relations. Within the GENERIC framework with quadratic dissipation potential, Equations (5.4) are represented by Equation (5.3) by setting K ij = T0 L ij (x) − M ij (x) .
(5.6)
The antisymmetric part of matrix K ij is given by the Hamiltonian part of the evolution equations, i.e., by the Poisson bivector, while the symmetric coupling is given by the dissipation potential or dissipative matrix. In the original works of Onsager and Casimir, the magnetic field was the only odd quantity (with respect to TRT) on which the matrix K ij depended. In the case of GENERIC the matrix depends in general on all state variables and thus not only the magnetic field but all odd state variables get inverted simultaneously with the transposition. Let us assume for a moment that both L ij and M ij are constant matrices, which means that they are even with respect to TRT. The condition of reversibility of L, Equation (4.17), then tells us that only the state variables with opposite parities can be coupled via the Poisson bivector L, which is antisymmetric. Similarly, due to the condition of irreversibility of the evolution generated by the matrix, Equation (4.31), only the state variables with the same parity can be coupled via the dissipative matrix M, which is symmetric. When both L and M are constant, OCRR are automatically satisfied within GENERIC. However, the Poisson bivector is usually not constant, as for instance in the case of fluid mechanics (Section 3.7.5), where coupling between fields at different points ρ(r a ) and u j (r b ) is mediated by ρ(r ),u j (rb )
a L(FM)
= ρ(r b )
∂δ(ra − r b ) j
.
(5.7)
∂r b
Reversibility condition (4.17) is clearly satisfied, since this component of the Poisson bivector is even with respect to TRT and ρ and u have opposite parities. OCRR are also
150 | 5 Reversible and irreversible evolution
satisfied because state variables with opposite parities are coupled via an antisymmetric operator. Similarly, coupling between u i (r a ) and u j (r b ) is given by u (r ),u j (rb )
i a L(FM)
= u i (r b )
∂δ(rb − r a ) j ∂r b
− u j (r a )
∂δ(rb − r a ) ∂r ia
.
(5.8)
This component of the Poisson bivector provides coupling between state variables u i (ra ),u j (rb ) with the same parity. Parity of the component L(FM) is odd, which is in agreement with reversibility condition (4.17). The complementary component of the bivector satisfies u j (rb ),u i (ra ) u i (ra ),u j (rb ) u i (ra ),u j (rb ) L(FM) (ρ, u, s) = −L(FM) (ρ, u, s) = L(FM) (ρ, −u, s) , (5.9) and the bivector thus provides symmetric coupling between state variables with the same parities when transposition and TRT are carried out simultaneously. OCRR are again fulfilled. The dissipative matrix, which is symmetric and fulfills condition (4.31), can be analyzed analogously with the same results, so that OCRR are automatically satisfied within GENERIC with quadratic dissipation potential. State variables with the same parities are coupled by an operator symmetric with respect to simultaneous transposition and TRT while state variables with opposite parities are coupled by an operator antisymmetric with respect to simultaneous transposition and TRT. OCRR can be written in a compact form K ij (x) = P(x i )P(x j )K ji (I(x)) ,
(5.10)
where I is the application of TRT. These generalized Onsager–Casimir reciprocal relations are satisfied within GENERIC automatically as shown for instance in [69]. In the case of a general nonquadratic dissipation potential, the Poisson bivector part still satisfies OCRR, but the dissipative part has to be discussed a bit differently. Since the dissipation potential is even with respect to TRT, it follows that I(
δ2 Ξ δ2 Ξ δ2 Ξ i j i j ) = P(x )P(x ) = P(x )P(x ) , δx∗i δx∗j δx∗i δx∗j δx∗j δx∗i
(5.11)
which is a nonlinear analogue of Equation (5.10).
5.3 Reductions and extensions We have already seen that physical systems can be viewed from various levels of description simultaneously. Passage (projecting) from a more detailed level to a less detailed (lower) level of description is a reduction. Conversely, passage (lifting) from a less detailed level to a more detailed (higher) level of description is an extension. Let us now formulate a few methods for reductions and extensions.
5.3 Reductions and extensions
| 151
5.3.1 Dynamic MaxEnt reduction In nonequilibrium thermodynamics one often deals with the problem of how to reduce some detailed evolution to a less detailed evolution. In particular, one often has a fast state variable that is to be eliminated from the evolution equations (enslaved by the other variables) by reaching its quasiequilibrium faster than the rest of the state variables. A reduction method was proposed in [61] and [43] that relies on distinguishing between state and conjugate variables. It is indeed natural to treat them as different standalone entities, as shown in the contact geometric formulation of GENERIC, Chapter 7. Let us formulate and simultaneously illustrate the reduction on the system of evolution equations for a damped particle in energetic representation r ̇ = p†
(5.12a) †
†
ṗ = −r − ζp 1 2 ṡ = † ζ (p† ) , s
(5.12b) (5.12c)
where s represents entropy. Note that the evolution equations do possess a GENERIC structure with a canonical Hamiltonian part (Poisson bracket (3.3)) and dissipation potential Ξ = ∫ dr ζ1/e∗ (p∗ )2 , where star refers to conjugation with respect to entropy. In the energetic representation the conjugate variables are derivatives of energy, E r = r† ,
E p = p†
and
E s = s† .
(5.12d)
Total energy E = p2 /2m + V(r) + ε(s)
(5.12e)
is clearly conserved, Ė = 0, and function V(r) represents a potential (e.g., V(r) = αr2 ). Equations (5.12) represent damped motion of a particle with friction. The reduction then proceeds in the following steps: 1. Write down the evolution equations for some state variables x including irreversible terms. Derivatives of energy with respect to the state variables are called conjugate variables x† . One of the state variables (fast variable xfast ) is assumed to be evolving faster than the rest of the state variables (slow variables xslow ). In the case of Equations (5.12) the fast variable is p. 2. Formulate entropy S(x) as a functional of the state variables including energy density, and find its maximum subject to the knowledge of the slow variables xslow (MaxEnt value of the fast variable x̃ slow ). In the case of Equations (5.12), the highest entropy at given r and energy, or lowest energy for given r and s is for p = 0, which is the MaxEnt value of the p variable. 3. Substitute the MaxEnt value for the fast state variable everywhere in the evolution equations, and set the partial time derivative of the fast variable to zero, ẋ fast = 0.
152 | 5 Reversible and irreversible evolution
In the case of Equations (5.12), this means r ̇ = p†
(5.13a) †
†
0 = −r − ζp 1 2 ṡ = † ζ (p† ) . s
(5.13b) (5.13c)
4. Solve the equation for the quasiequilibrium of the fast variable to obtain the conjugate fast variable x̃ †fast as a function of slow state and conjugate variables. In the case of Equations (5.13), this means 1 p̃ † = − r† . ζ 5.
Substitute the solution for the fast conjugate variable in the slow equations. This way a closed set of reduced slow equations is obtained. Equations (5.13) become 1 r ̇ = − r† ζ 1 1 † 2 ṡ = † (r ) . s ζ
6.
(5.14)
(5.15a) (5.15b)
This means that the particle tends to the minimum of the potential V(r) (r† = V = 0)) and entropy grows during the approach. (Not a necessary step) By solving for x̃†fast , the relation between state and conjugate variables x†fast = E xfast was violated. To restore the relation we find xfast for which E xfast = x̃ †fast and substitute it into the energy functional E(x) to get the reduced ̃ slow ). In the case of the damped particle this means energy E(x p† = and energy becomes¹
p 1 1 = − r† = − V r , m ζ ζ
m Ẽ = 2 (V r )2 + V(r) + ε(s) . 2ζ
(5.16)
(5.17)
Let us refer to this reduction as to the dynamic MaxEnt reduction. In summary, by regarding the state and conjugate variables as distinct entities, we can first set the fast state variable to the corresponding MaxEnt value while solving the evolution equation for the fast variable for the fast conjugate variable. When the solution (conjugate fast variable) is plugged back into the evolution equations for the slow variables, part of the slow reversible evolution becomes irreversible. Dynamic MaxEnt reduction turns reversible evolution of the slow variables to partly irreversible by letting the partly irreversible evolution of the fast variable relax. 1 For quadratic potential V(r) = αr 2 energy satisfies Ẽ = ((2mα 2 )/ζ 2 + α)r 2 + ε(s).
5.3 Reductions and extensions | 153
5.3.2 Ehrenfest reduction Another method of reduction, the Ehrenfest reduction, was developed in [92, 93]. 5.3.2.1 General formulation Consider a higher (more detailed) level of description and a lower (less detailed) level, the state variables of which are given by a projection from the higher level. Let the evolution equation on the higher level (with state variables x) be ẋ = J(x) .
(5.18)
The starting point of the Ehrenfest reduction is to expand solutions to this evolution equation in Taylor series in time (i.e., close to the initial condition x(t + τ)|τ=0 = x(t)), x(t + τ) = x(t) + τ x|̇ t +
τ2 x|̈ t + O(τ 3 ) . 2
(5.19)
Substituting Equation (5.18) into the expansion leads to x(t + τ) = x(t) + τJ(x(t)) +
τ 2 δJ(x(t)) ⟨ , J(x(t))⟩ + O(τ 3 ) . 2 δx
(5.20)
State variables on the lower level of description were assumed to be given by a projection y = ⟨π, x⟩ , (5.21) where ⟨π, ∙⟩ is a projection operator. Derivatives of the projection ∂π a /∂x j will be denoted simply as π ai . For linear constant-in-time projection operators the derivatives constitute a constant matrix. Exact evolution of variables y can be obtained by ẏ = ⟨π, x⟩̇ = ⟨π, J(x)⟩ ,
(5.22)
but in order to evaluate it, it would be necessary to solve equation (5.18). Since the aim is to obtain an evolution equation for y only in terms of y, a reduction has to be carried out. In other words, some information has to be forgotten. The autonomous evolution equation on the lower level will be sought so that solutions to the equation match projections of the higher level solutions (5.20) (up to a certain order of τ). Let the evolution equation on the lower level be ẏ = ϕ(y) ,
(5.23)
where ϕ(y) is a yet unknown operator. Expanding formally, a solution to this equation around an arbitrary initial condition y(t) yields y k (t + τ) = y k (t) + τϕ k (y(t)) +
τ2 δϕ k ϕj . 2 δy j
(5.24)
154 | 5 Reversible and irreversible evolution
To identify the asymptotic expansion of the unknown operator ϕ, we write (0)
(1)
ϕ k = R k + τR k +
τ2 (2) R + O(τ 3 ) . 2 k
(5.25)
Now we compare the solutions on the lower level (5.24) to the solutions on the higher level (5.20). In order to achieve that, however, the more detailed solutions have to be expressed in terms of y. We choose the mapping from y to x to be the MaxEnt ̃ mapping x(y), i.e., to find x such that the detailed entropy S(x) is maximal subject to the constraints represented by y = ⟨π, x⟩. The MaxEnt mapping leads to τ2 δJ(x(t)) , J(x(y))⟩⟩ ̃ ̃ ⟨π, x(t + τ)⟩ = ⟨π, x(t)⟩ + τ⟨π, J(x(y))⟩ + + O(τ 3 ) , ⟨π, ⟨ 2 δx x(y) ̃ (5.26) ̃ where the quasiequilibrium x(y) initial conditions were chosen so that only y appears in the expansion. On the other hand, by substituting (5.25) into (5.24)) with projection of Equation (5.20), we obtain (0)
y k (t + τ) = y k (t) + τR k +
(0)
δR k (0) τ2 (1) R ) + O(τ)3 . (2R k + 2 δy j j
(5.27)
The comparison to (5.26) leads to ̃ y k = ⟨π k , x(y)⟩ (0)
̃ R k = ⟨π k , J(x(y))⟩
. . . from the τ0 coefficient, . . . from the τ 1 ,
(5.28a) (5.28b)
and (1)
(0) δR k 1 δJ(x(t)) (0) , J(x(y))⟩⟩ ̃ (⟨π k , ⟨ − ⟨ , R j ⟩) 2 δx x(y) δy j ̃ ̃ δJ(x(t)) δ⟨π k , J(x(y))⟩ 1 , J(x(y))⟩⟩ ̃ ̃ −⟨ , ⟨π j , J(x(y))⟩⟩) = (⟨π k , ⟨ 2 δx x(y) δy j ̃
Rk =
(5.28c) from τ 2 . The right hand side of the lower level evolution equation (operator ϕ) has thus been completely estimated so that solutions on the two levels agree up to the order of τ 2 . The evolution equation on the lower level then reads (0) (1) ẏ k = ϕ k (y) ≈ R k + τR k , (0)
(1)
(5.29)
where R k and R k have been identified above (Equations (5.28)). This is the evolution equation on the lower level obtained by the Ehrenfest reduction. Note that the τ 0 term has to be strictly satisfied due to the requirement that both the more and less detailed evolution equations coincide at τ = 0 on the quasiequilib̃ rium manifold x(y). This relation can also be naturally understood as the least biased ̃ way to express x in terms of y due to the MaxEnt mapping from y to x(y).
5.3 Reductions and extensions
| 155
(1)
The first correction R k is typically nonzero as the detailed evolution (5.18) car̃ ries x from the quasiequilibrium x(y) to values that are not in the image of the MaxEnt mapping, i.e., out of the quasiequilibrium (or Legendre) submanifold, and corrections have to be introduced. The Ehrenfest reduction typically turns even reversible evolution into partially irreversible. The Ehrenfest reduction turns even completely reversible evolution (e.g., Hamiltonian) to partly irreversible. The key ingredient for this feature is the expansion of the evolution equations. Let us investigate this feature in more detail. 5.3.2.2 Hamiltonian self-regularization (0) (1) Interestingly, it can be shown [66] that the R k term represents reversible and R k irreversible contributions to the evolution, at least when the evolution on the higher level is purely Hamiltonian, ẋ i = L ij E x j . (5.30a) We have seen in Section 3.5 that Hamiltonian evolution on a higher level often implies Hamiltonian evolution on a lower level of description. Assuming this relation, the implied Hamiltonian evolution on the lower level is ẏ a = ↓L ab↓E y b ,
(5.30b)
where the Poisson bivector is defined by Equation (3.94) and where energy on the lower level can be approximated by the higher level energy evaluated at the MaxEnt ̃ Both these evolutions are purely reversible. value, ↓E(y) = E(x(y)). Further, if the Poisson bivectors are constant, expansions of the solutions (5.24) and (5.20) obtain a particularly simple form (compatible with the exponential expansion of a Lie derivative; see [25]), x i (t + τ) = x i (t) + τL ij E x i +
τ2 ij δ2 E kl L E x l + O(τ 3 ) L 2 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ δx j x k
(5.31a)
= −M ik
y a (t + τ) = y a (t) + τ ↓L ab↓E y b +
τ2
δ2↓E ↓ cd ↓ L L E y d + O(τ 3 ) . 2 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ δy c y b ↓ ab
= −↓ M
(5.31b)
ad
By differentiation with respect to τ, i.e., increasing the time step, these expansions (or approximations of solutions on the two levels) can be interpreted as being generated by evolution equations τ ẋ i (t) = L ij E x j − M ij E x j (5.32a) 2 τ ab ẏ a (t) = ↓L ab↓E y b − ↓ M ↓E y b , (5.32b) 2 which can be seen as regularized versions of the original evolution equations (5.30). ab The matrices M ij and ↓ M are the symmetric positive semidefinite dissipative matrices, which produce irreversible evolution. We have thus acquired a self-regularization
156 | 5 Reversible and irreversible evolution
of the Hamiltonian evolution, which consists of the original Hamiltonian evolution and extra irreversible terms (proportional to τ). By comparison of the expansions (5.31), the Ehrenfest reduced evolution equation, Equation (5.29), reads [66] ẏ a (t) = ↓L ab↓E y b −
τ ab − ↓ M ↓E y b ) . (π a M ij |x(y) ̃ E x j |x(y) ̃ 2 i
(5.33)
5.3.2.3 Canonical Hamiltonian system Let us again consider a movement of a particle in a potential field. Let the variables (r, p) again denote position and momentum of the particle. Hamiltonian evolution of these variables is then given by ṙ 0 ( )=( ̇ p −1
1 Hr ) )⋅( Hp , 0
(5.34)
with H(r, p) being energy of the particle in a static external field, e.g., H(r, p) =
p2 + V(r) . 2m
(5.35)
The self-regularized evolution of (r, p) is then, according to Equation (5.32), ṙ 0 ( )=( ṗ −1
τ Hpp −Hpr Hr 1 Hr )⋅( ) . )⋅( )− ( 2 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ Hp −Hrp Hrr Hp 0
(5.36)
=M
For the particular choice of Hamiltonian (5.35), the evolution equations become p p τ 1 τ Vr Vr 0 ṙ )⋅( p ) = ( m ) − ( ( ) = ( m ) − (m ) 2 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ 2m 0 Vrr ṗ −Vr −V V ⋅p, r rr m
(5.37)
=M
which is the self-regularized evolution of the particle. Assuming that the external field V(r) is convex and that it has a minimum, the Hamiltonian (or energy) is also convex. Consequently, the dissipative matrix M is positive-semidefinite, and energy is dissipated in the course of evolution as p p τ 1 ⋅ Vrr ⋅ ) ≤ 0 , Ḣ = − ( (Vr )2 + 2 m m m
(5.38)
and the evolution stops at the position and momentum satisfying Vr = 0 and p = 0 ,
(5.39)
which is the equilibrium position of the particle within the field as well as the position of lowest total energy.
5.3 Reductions and extensions |
157
Let us now consider a less detailed level of description where only the position r plays the role of a state variable. The mapping from (r, p) to (r) is the projection between the two levels of description. The Poisson bivector on the less detailed description is a 1 × 1 matrix, i.e., a number, and it is given by 1 (1, 0) ⋅ L ⋅ ( ) = 0 . 0
(5.40)
The less detailed Poisson bivector is identically zero. The less detailed evolution is thus zero as well as the self-regularized less detailed evolution. But the less detailed evolution derived by the Ehrenfest reduction, Equation (5.33) is not zero and reads ṙ = −
τ τ Vr (1, 0) ⋅ ( Vr . )=− ̃ 2m 2m Vrr ⋅ p(r)
(5.41)
This reduced evolution tends again to the minimum of the external field.
5.3.3 Extensions Consider a continuum described by the balance equation of mass, balance of linear momentum, and balance of energy. It is then often the case that some of the balance laws contain undetermined terms like heat flux, stress tensor or source of mass (reactions), or momentum exchange in mixtures. When these terms are expressed as functions of the state variables ρ, m and e, the system of balance laws becomes a closed set of equations. We refer to this set of closures and the specification of the unknown terms as constitutive relations. The balance laws are interpreted within GENERIC as evolution equations for density ρ, total momentum density m or u, and total energy density e, and the constitutive relations are implicitly or explicitly given via a dissipation potential, i.e., via the irreversible evolution. Instead of specifying a constitutive relation, it is often advantageous to prescribe an independent evolution equation for an undetermined quantity (or a quantity related to it) coupled with the balance laws. Adding such a new evolution equation to the evolution equations for ρ, m and e is referred to as an extension. This is actually what extended irreversible thermodynamics (EIT) [94] or rational extended thermodynamics (RET) [55] aim to do. It is of course often impossible to add the new equation in a unique way, and there are more possible ways to formulate the equations as there are to propose a constitutive relation. The appropriate and plausible form stems from physical understanding (intuition). However, some restrictions like the second law of thermodynamics, and conservation of mass, momentum and energy or objectivity should be obeyed. It is advisable to consult [95] to see how different theories of nonequilibrium thermodynamics deal with extensions.
158 | 5 Reversible and irreversible evolution
The GENERIC framework is also suitable for extensions. Extensions carried out within GENERIC are done so in a more restrictive way than in EIT and RET because only GENERIC imposes conditions also on the reversible part. These more stringent conditions are actually an advantage of GENERIC because the less possibilities you have when doing the extension, the less things you have to decide. In particular, apart from conservation of mass, momentum and entropy, the terms added to the Poisson bracket should not violate the Jacobi identity (the geometric meaning of an extended Poisson bracket is that the kinematics is generated by a semidirect product [96] or even a matched pair [97, 98] providing symmetric action). For instance, Poisson bracket (3.138) was constructed as an extension of the bracket of fluid mechanics. The extension, however, is made in a unique way by expressing that the extra field of volume density of labels is passively advected by the field of momentum. Thermodynamic extensions have been summarized in Section 3.2 of [82]. We shall now summarize the physical reasons for and ways of performing thermodynamic extensions (following [82]). 5.3.3.1 Physical motivation for extensions Consider a lower (less detailed) level of description meso and a higher (more detailed) level MESO. The need to look at the passage meso → MESO (that we shall call an extension of the meso level) comes from an unsuccessful validation of the meso models and/or from the need to obtain additional thermodynamic information on the meso level that eventually arises from the reduction process MESO → meso. The validation is unsuccessful if the results of experimental observations cannot be satisfactorily seen in solutions of the meso models. Then it becomes obvious that the meso description is incomplete. Some details ignored on the meso level must actually be important for arriving at a satisfactory agreement with results of our experimental observations. Where and how shall we look for the important physics that is missing in meso? In the case of externally unforced systems (i.e., systems that are allowed to reach the equilibrium level) the meso dynamics is GENERIC and we shall, of course, require that the equation governing the time evolution on the extended MESO level is also a GENERIC equation (5.1). For externally forced systems that are prevented from reaching the equilibrium level, neither the meso nor the extended MESO dynamics is GENERIC. There are essentially three different routes that have been explored in the search for the extra physics involved in the extended MESO theory. We shall briefly describe them in the three following sections. 5.3.3.2 Langevin extensions The experimental evidence driving this route to extensions is the observation of fluctuations. Results of experimental measurements are not found to be always the same.
5.3 Reductions and extensions
| 159
This is because the state characterized by one y is in fact a family of states. Results of the experimental measurements are different for different states in the family. This then means that one value of y is associated with a family of experimental values. In the Langevin extension one does not try to identify the microscopic causes of the fluctuations (i.e., the missing physics on the meso level). The objective is to appropriately describe the observed fluctuations. Following Langevin, we turn to the mathematics of random variables and stochastic processes [71, 99, 100]. The physical aspects of the Langevin extension are discussed for example in [5, 101–104]. Below, we shall briefly recall the GENERIC formulation in a simple setting. A more complete GENERIC formulation is discussed in [71, 100]. Our objective is to extend the meso level to a MESO level that takes into account fluctuations seen on the meso level. First, we turn to the choice of state variables. The quantity y serving as the state variable on the meso level is either replaced by ŷ that is a random variable or by f(y) that is a distribution function. Below, we shall follow the latter extension. The state variable x on the MESO level is thus f(y). Next, we need to formulate a GENERIC equation (5.1) with f(y) serving as a state variable on the extended MESO level from a known GENERIC equation (5.1) with y serving as the state variable on the meso level. We shall restrict ourselves to the meso dynamics with the quadratic dissipation potential Ξ(m) (y, y∗ ) =
1 ∗ (m) ⟨y , M (y)y∗ ⟩ , 2
(5.42)
where M (m) is a positive definite operator. No restrictions are placed on the Poisson bracket (m) (m) (m) {A(m) , B(m) } = ⟨A y , L(m) B y ⟩ , (5.43) and the thermodynamic potential Φ(m) (y). Now we proceed to the extension y → f(y) = x. In kinematics, we make the extension (M)
(M) (m)
{A(m) , B(m) }(m) → {A(M) , B(M) }(M) = ∫ dy f(y) {A f(y) , B f(y) }
,
(5.44a)
which has the same structure as the Lie–Poisson bracket (3.60). The dissipation potential extends to Ξ(m) (y, y∗ ) =
1 ∗ (m) ⟨y , M (y)y∗ ⟩ 2 ∂f ∗ (y) ∂f ∗ (y) 1 , M (m) (y) ⟩ = Ξ(M) (x, x∗ ) , → ∫ dy f(y) ⟨ 2 ∂y ∂y
(5.44b)
and in the thermodynamic potential to Φ(m) (y) → ∫ dy f(y) (Φ(m) (y) + k B ln f(y)) = Φ(M) (x) , (M)
where f ∗ (y) = Φ f(y) and k B is the Boltzmann constant.
(5.44c)
160 | 5 Reversible and irreversible evolution
The equation governing the time evolution on the MESO level is thus a realization of GENERIC equation (5.3) ∂f(y) ∂ ∂ ∂f(y) ∂ (m) (m) =− (f(y)TL(m) Φ y (y)) + (M (m) (y)f(y)Φ y (y)) + (k B M (m) (y) ). ∂t ∂y ∂y ∂y ∂y (5.45) The first term on the right hand side is the term arising in the Liouville formulation of the time evolution equation on the meso level. The last two terms on the right hand side represent the dissipative part of the MESO time evolution. The first one is the Liouville formulation of the dissipation term on the meso level, the second is a new (Fokker–Planck-like) term that arises due to the presence of fluctuations. The fact that the operator M (m) (y) is the same in both terms is a formulation of the fluctuationdissipation theorem. We thus see that in this GENERIC formulation the fluctuationdissipation theorem is a simple consequence of the requirement that the GENERIC structure is preserved in the extension. 5.3.3.3 Kirkwood extensions The prime example of the experimental evidence motivating this type of extension is the observation of the flow behavior of complex fluids (for example the flow behavior of the egg white). Flow of the egg white is manifestly different from the flow of water. Since the main difference between water and the egg white is the size of the molecules composing them, it is natural to suggest that the reason for the difference in the flow behavior is the strong coupling between the motion of the large macromolecules composing the egg white (involving all types of deformations and rotations) with the overall fluid motion. Such coupling is absent in water where the molecules composing it are small. The deformations and rotations of the small water molecules enter the classical fluid mechanics (representing in this example the meso level) only with unchanging material parameters with time, like viscosity and heat conductivity coefficients. Motivated by the example of polymeric fluids, we choose x (serving as the state variables on the extended MESO level) as y (serving as the state variable on the meso level) supplemented with quantities characterizing the internal structure. With such extended state variables we have to then construct the equation governing their time evolution. By requiring it to be GENERIC, we face the problem of constructing appropriate new particular realizations of the GENERIC equation (5.1). Many such realizations have indeed been made and many are reviewed in [105]. In the standard approach to modeling, the equations of fluid mechanics that are extended by taking into account the internal structure appeared first in the Kirkwood investigation of the reduction of the fully microscopic Liouville equation (formulated in the form of the Bogoliubov–Born–Green–Kirkwood–Yvon (BBGKY) hierarchy) to the level of fluid mechanics [106, 107]. This is the reason why we call this extension a Kirkwood extension. The Kirkwood investigation was then followed systematically in rheology [108].
5.3 Reductions and extensions | 161
With the internal structure created in the flow (the turbulence type structure), the Kirkwood-like extension of the Vlasov kinetic equation was explored in [67]. In the context of the nonequilibrium thermodynamics the extensions involving internal state variables were introduced in [109–111]. An alternative way to include the internal structure into the state variables is to increase the dimension of the space of the variables on which the fields forming the meso state variables depend. This was introduced in the continuum theory in [112], in kinetic theory in [113] and in [114] (where the one particle distribution function, depending on the position vector r and the velocity v, is allowed to depend also on another scalar parameter that addresses the internal structure of the gas particle and that enters the dynamics in collisions), and in chemical kinetics in [115] where the mass concentrations of species (forming the meso state variables in chemical kinetics) are allowed to depend on a scalar parameter labeling the intermediate states in the chemical reactions (the parameter enters the dynamics in the energy). Still another extension of this type was introduced in [116]. The physical systems under investigation in [116] are polymeric fluids. The setting in which the modeling in [116] begins is already extended classical fluid mechanics in which a new field, namely the one dumbbell distribution function (the macromolecules are modeled as dumbbells) has been adopted as an extra state variable. A more realistic model of macromolecules is a chain composed of dumbbells. The problem is now to extend the one dumbbell model to a chain model. De Gennes suggested mathematically formulating the more realistic chain view of macromolecules by letting the one dumbbell distribution function depend on an extra scalar parameter having the physical interpretation of the coordinate on the string on the chain. In dynamics, this parameter enters the de Gennes analysis in a new diffusion term having the physical interpretation of the snake-like motion (called reptation by de Gennes) of the macromolecular chain. In this way de Gennes succeeded to express (while still keeping the one chain distribution function as the state variable) the strong chain-chain interactions influencing the overall flow properties of polymeric fluids. One still unexplored possibility is to include the chain coordinate also in the energy. Such a modification would allow us to consider the influence of the curvature of the chain and of its elastic deformations on the overall motion of polymeric fluids. In the GENERIC form, the de Gennes reptation theory was discussed in [117] and, on a more macroscopic level on which the states of macromolecules are characterized by an internal deformation tensor, in [118]. 5.3.3.4 Grad extensions The extra state variables are found on this route to extensions in the vector fields appearing on the meso level. We begin with a simple motivating example. Let the state variable y on the meso level be the position vector r and the equation governing its time evolution ṙ = v(r). The vector field v(r) on this meso level is called a velocity (or alternatively a flow of r), and its specification, i.e., the specification of the function
162 | 5 Reversible and irreversible evolution
v(r), is called a constitutive relation. Now we proceed to the extension. We consider v as a new state variable. The state variable x on the extended MESO level is thus (r, v). The equations governing its time evolution is ṙ = v ; v̇ =
F(r) ξ v − , m m
(5.46)
where F(r) has the physical interpretation of a force, ξ > 0 is a friction coefficient, and m > 0 is another parameter having the physical interpretation of mass. The meso → MESO extension that we have just described is an extension of mechanics without inertia into mechanics with inertia and with friction. The limit m → 0 is a reduction MESO → meso leading back to ṙ = v(r) with the constitutive relation v(r) = F(r)/ξ . The Grad hierarchy formulation of the Boltzmann kinetic equation provides an excellent setting for making this type of extension in classical fluid mechanics. Such an extension has been considered in [114, 119] (where the extended fluid dynamics theories are called rational extended thermodynamics [RET]), and in [94] (where the extended theories are called extended irreversible thermodynamics [EIT]). The main difference between RET and EIT is that RET remains closely attached to the Grad hierarchy and thus to the gas dynamics (including however both the monoatomic and the polyatomic gases [114]), while the extensions that have been developed in EIT are more motivated by fluid-mechanics type considerations and the intended applications reach beyond gas dynamics. Both RET and EIT extensions are however extensions in which the constitutive relations are replaced by time evolution equations and thus extensions introducing a higher order inertia. The GENERIC approach to this type of extension has recently been explored in [120]. Let us now proceed to concrete examples of extensions and reductions.
5.4 Hyperbolic and Fourier heat conduction The mechanics of heat transport can be seen as the mechanics of phonons as in Section 3.9, which can be expressed by the Boltzmann Poisson bracket on the Boltzmann (kinetic) level of description or by the Poisson bracket for phonon momentum density and entropy density on the fluid-mechanistic level for phonons. The latter level is suitable for coupling with fluid mechanics. After the transformation from the phonon momentum density π to the conjugate entropy flux w = π/s, the reversible evolution of fluid mechanics coupled with the conjugate entropy flux w is given by Equations (3.193). Let us now equip the equations with dissipative terms. It can be anticipated that after a relaxation time, Fourier’s law will be recovered. Dissipative terms are added to the evolution equation for w because relaxation of this fast state variable will lead to Fourier’s law by means of the dynamic MaxEnt reduction.
5.4 Hyperbolic and Fourier heat conduction
| 163
Local dissipation is enforced by adopting an algebraic dissipation potential, the simplest of which is Ξ(w∗ ) = ∫ dr
11 ∗ 2 11 1 † 2 (w ) = ∫ dr ( w ) , 2τ 2 τ s†
(5.47)
where the last equality follows from the transformation between energetic and entropic representation, Equation (4.53). Then the irreversible terms generated by this dissipation potential are added to the reversible evolution, Equations (3.193), ∂ρ = −∂ k (ρm†k ) ∂t ∂m i = −∂ j (m i m†j ) − ∂ j (w i w†j ) − ρ∂ i ρ † − m j ∂ i m†j − s∂ i s† ∂t − w k ∂ i w†k + ∂ i (w†k w k ) ∂s 1 = −∂ k (sm†k + w†k ) + (w† )2 ∂t τ(s† )2 ∂w k 1 = −∂ k s† − ∂ k (w j m†j ) + (∂ k w j − ∂ j w k ) (m†j + w†j ) ∂t s 1 † − † wk . τs
(5.48a)
(5.48b) (5.48c)
(5.48d)
These are the GENERIC equations for fluid mechanics with hyperbolic heat conduction. The simplest possible dependence of entropy on the extra field w is quadratic (keeping in mind that S has to be an even functional with respect to TRT), S(ρ, m, e, w) = ∫ dr s (ρ, e −
m2 1 − αw2 ) . 2ρ 2
(5.49)
Consequently, entropy is highest (for given fields ρ, u and e) at w = 0, which is the MaxEnt estimate w.̃ Plugging this value into equations (5.48) leads to ∂ρ = −∂ k (ρm†k ) ∂t ∂m i = −∂ j (m i m†j ) − ρ∂ i ρ † − m j ∂ i m†j − s∂ i s† ∂t ∂s 1 (w† )2 = −∂ k (sm†k + w†k ) + ∂t τ(s† )2 1 0 = −∂ k s† − † w†k . τs
(5.50a) (5.50b) (5.50c) (5.50d)
Equation (5.50d) has the solution w̃ † = −τs† ∇s† .
(5.51)
164 | 5 Reversible and irreversible evolution
Plugging this value into the rest of the equations (5.50), we obtain ∂ρ = −∂ i (ρE m i ) ∂t ∂m i = −∂ j (m i E m j ) − ρ∂ i E ρ − m j ∂ i E m j − s∂ i E s ∂t ∂s = −∂ k (sE m k − τE s ∂ k E s ) + τ(∇E s )2 , ∂t
(5.52a) (5.52b) (5.52c)
which are Euler equations with Fourier heat conduction. Indeed, denoting local temperature E s as T, the entropy flux is J(s) = −τT∇T =
−λ∇T , T
(5.53)
where λ = T 2 τ is the heat conductivity and q = −λ∇T is the heat flux. In summary, Fourier’s law, which tells us that heat flows from a hotter body to a colder body, can be derived by the dynamic MaxEnt reduction from the coupled dynamics of phonons and fluid mechanics. The only irreversibility on the higher level of description is present in the evolution equation for w. After the reduction, this irreversibility leads to irreversible terms in the equation for entropy (irreversible entropy flux and entropy production).
5.5 Left Cauchy–Green tensor Reversible evolution of fluid mechanics coupled with the left Cauchy–Green (LCG) tensor B is given by equations (3.163). These equations will be now equipped with dissipative terms. Let the dissipation potential be quadratic, Ξ(B∗ ) = ∫ dr
1 1 (dev B∗ )2 + (tr B∗ )2 , 2τ s 2τ v
(5.54)
where dev B = B − 1/3 tr BI is the deviatoric part of tensor B. In the energetic representation the potential becomes Ξ(B† ) = ∫ dr
1 1 (dev B† )2 + (tr B† )2 . † 2 2τ s (s ) 2τ v (s† )2
(5.55)
The derivative of this dissipation potential is 1 1 1 (dev B† )kl (δ ki δ lj − δ mi δ mj δ kl ) + tr B† δ mi δ mj † 2 3 τ s (s ) τ v (s† )2 1 1 = (dev B† )ij + tr B† δ ij . † 2 τ s (s ) τ v (s† )2
Ξ B† = ij
(5.56)
5.5 Left Cauchy–Green tensor
| 165
In the energetic representation (4.57), one irreversible term is added to the evolution equation for B and one to the equation for s (entropy production), ∂ρ ∂t ∂u i ∂t ∂s ∂t ∂Bij ∂t
= −∂ i (ρu †i )
(5.57a)
= −∂ j (u i u †j ) − ρ∂ i ρ † − u j ∂ i u †j − s∂ i s† + B†jk ∂ i Bjk + ∂ k (Bkm (B†mi + B†im )) 1 1 (dev B† )2 + (tr B† )2 † 2 τ s (s ) τ v (s† )2 1 1 = −u †k ∂ k Bij + Bki ∂ k u †j + Bkj ∂ k u †i − (dev B† )ij − tr B† δ ij . τ s s† τ v s†
= −∂ i (su †i ) +
(5.57b)
Energy (3.180) can be expressed in terms of LCG (by using relation B = c/n, Equation (3.168)) as E = ∫ dr [
1 u2 1 + nH tr B + ε (n, s − nk B ln det B)] , 2ρ 2 2
(5.58)
the derivative of which with respect to the LCG tensor B is EB =
1 1 nHI − ε s k B nB−1 . 2 2
(5.59)
Parameter H is the spring constant of the dumbbells immersed in the fluid. Let us now employ the dynamic MaxEnt reduction to relax the fast B state variable. Entropy from Equation (5.58) can be expressed in terms of the total energy density by inverting the equation, 1 u2 1 − nH tr B)] , S = ∫ dr [ nk B ln det B + s (n, e − 2 2ρ 2
(5.60)
where s(n, ε) is the relation obtained by solving ε = ε(n, s). This entropy attains its maximum (keeping the hydrodynamic fields constant) at the value of B where energy (5.58) has minimum, i.e., at the MaxEnt value kB T B̃ = I. H
(5.61)
For simplicity we will assume that H = k B T Ĥ with Ĥ is a constant. The MaxEnt value of the LCG tensor is proportional to the unit matrix. Plugging the MaxEnt value B̃ into the evolution equations (5.57) leads to ∂ρ = −∂ i (ρu †i ) ∂t ∂u i = −∂ j (u i u †j ) − ρ∂ i ρ † − u j ∂ i u †j − s∂ i s† + ∂ k (Ĥ −1 (B†ki + B†ik )) ∂t ∂s 1 1 = −∂ i (su †i ) + (dev B† )2 + (tr B† )2 ∂t τ s (s† )2 τ v (s† )2 1 1 0 = Ĥ −1 (∂ i u †j + ∂ j u †i ) − (dev B† )ij − tr B† δ ij . † τs s τ v s†
(5.62a) (5.62b)
(5.62c)
166 | 5 Reversible and irreversible evolution
Solution to the last equation is tr B† =
2 τ v s† div u† 3 Ĥ
and
dev B† =
τ s s† dev (∇u† + (∇u† )T ) . Ĥ
(5.63)
Plugging this solution back into Equations (5.62), we obtain ∂ρ = −∂ i (ρu †i ) ∂t ∂u i = −∂ j (u i u †j ) − ρ∂ i ρ † − u j ∂ i u †j − s∂ i s† ∂t 2τ s s† 4 τ v s† + ∂k ( dev (∇u† + (∇u† )T )ik + div u† δ ik ) 9 Ĥ 2 Ĥ 2 τs 4 τv ∂s 2 (dev (∇u† + (∇u† )T )) + (div u† )2 . = −∂ i (su †i ) + 2 2 ̂ ̂ ∂t 9 H H
(5.64a)
(5.64b) (5.64c)
These are the hydrodynamic equations acquired by the dynamic MaxEnt reduction. Equations (5.64) are in fact the Navier–Stokes equations where τ v is proportional to the bulk viscosity and τ s to the shear viscosity. Indeed, by denoting μ=
2τ s T , Ĥ 2
and
μv =
4 τv T , 9 Ĥ 2
(5.65)
the terms in the evolution equation for momentum density under divergence become the irreversible Newtonian Cauchy stress tensor (NS)
Tirr
4 = 2μ dev D + μ v div vI = 2μD + (μ − μ) div vI , ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ 3
(5.66)
=ζ
which is the same as in Section 4.6.2.2. The total Cauchy stress tensor is the sum of the hydrodynamic pressure (3.116b) and this irreversible part, (NS)
T = −p(FM) I + Tirr .
(5.67)
If the volumetric relaxation time τ v goes to infinity, it follows from Equation (5.62c) for i = j that the tr B† becomes undetermined and the condition of incompressibility, ∇ ⋅ Eu = 0, is enforced. This way the incompressible Navier–Stokes equation can be recovered, and the undetermined spherical part of B plays the role of pressure in incompressible fluids. In summary, the compressible (and also incompressible) Navier–Stokes equation is an approximation by the dynamic MaxEnt reduction of the evolution of the LCG tensor and fluid mechanics (5.57).
5.6 Kinetic theory Kinetic theory serves as the description of physical systems in terms of distribution functions. The most detailed kinetic level of description is the Liouville level, where
5.6 Kinetic theory
| 167
the N-particle distribution function plays the role of a state variable and where the Liouville Poisson bracket generates the reversible evolution; see Section 3.4. The least detailed kinetic level of description is the Boltzmann level, where evolution the one-particle distribution function is governed by the evolution equation generated by the Boltzmann Poisson bracket (3.99) and a dissipation potential (discussed in Section 5.6.1). In between the Liouville and Boltzmann levels a whole hierarchy (often called the BBGKY) of several-particle kinetic levels of description can be constructed (e.g., [39]), and we shall give an example in Section 5.6.3, where we discuss the one-and-twoparticle kinetic theory.
5.6.1 Boltzmann equation The reversible part of the Boltzmann equation is Hamiltonian and once energy, typically in the form of p2 E(f) = ∫ dr ∫ dp f(r, p) (5.68) 2m is provided, the Hamiltonian part of the equation is fully specified as given in Equation (3.101). Let us now calculate the irreversible part of the Boltzmann equation, which is generated by the strongly nonlocal dissipation potential (4.84). The derivative of the dissipation potential reads d Ξ(f ∗ + λδf ∗ ) dλ λ=0 =
X(f ∗ + λδf ∗ ) d ∫ d1 ∫ d1 ∫ d2 ∫ d2 W(f, 1, 1 , 2, 2 )2 cosh ( ) dλ λ=0 2
= ∫ d1 ∫ d1 ∫ d2 ∫ d2
W(f, 1, 1 , 2, 2 ) X(f ∗ ) sinh ( ) kB 2
(δf ∗ (1) + δf ∗ (2) − δf ∗ (1 ) − δf ∗ (2 )) = ∫ d3 ∫ d1 ∫ d1 ∫ d2 ∫ d2
W X(f ∗ ) sinh ( ) kB 2
(δ(3 − 1) + δ(3 − 2) − δ(3 − 1 ) − δ(3 − 2 )) δf ∗ (3)
168 | 5 Reversible and irreversible evolution
= ∫ d3( ∫ d2 ∫ d1 ∫ d2 + ∫ d1 ∫ d1 ∫ d2
W(3, 2, 1 , 2 ) X(3, 2, 1 , 2 ) sinh ( ) kB 2
W(1, 3, 1 , 2 ) X(1, 3, 1 , 2 ) sinh ( ) kB 2
− ∫ d1 ∫ d2 ∫ d2
W(1, 2, 3, 2 ) X(1, 2, 3, 2 ) sinh ( ) kB 2
− ∫ d1 ∫ d2 ∫ d1
W(1, 2, 1 , 3) X(1, 2, 1 , 3) sinh ( ) )δf ∗ (3) . kB 2
(5.69)
Now by considering the symmetries (4.85) and (4.86) and by relabeling 1 as 2 in the second summand, and 1 as 2 in the fourth summand, the first summand becomes equal to the second, and the third summand becomes equal to the fourth. Finally, swapping the first two arguments in all the forces with the last two arguments of the forces and using the antisymmetry of X with respect to such swapping, all the summands become equal, and the derivative of the dissipation potential becomes d Ξ(B) (f ∗ + λδf ∗ ) dλ λ=0 4W(3, 2, 1 , 2 ) X(3, 2, 1 , 2 ) = ∫ d3 ∫ d2 ∫ d1 ∫ d2 sinh ( ) δf ∗ (3) . kB 2 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(5.70)
δΞ (B) δf ∗ (3)
The requirement of local-in-space collisions (4.87) then leads to 4W(3, 2, 1 , 2 ) X(3, 2, 1 , 2 ) ∂Ξ(B) sinh ( = ∫ d2 ∫ d1 ∫ d2 ) ∗ ∂f (r, p) kB 2 = ∫ dp2 ∫ dp1 ∫ dp2 sinh (
̂ p, p2 , p1 , p2 ) 4W(f; kB
X((r, p), (r, p2 ), (r, p1 ), (r, p2 )) ) . 2
(5.71)
Note that the thermodynamic force X(f) disappears for locally Maxwellian distribution functions (2.123). This feature makes the Boltzmann entropy special among all possible Casimirs of the Boltzmann Poisson bracket. The conjugate distribution function f ∗ can be now identified with the derivative of the Boltzmann entropy (2.120), i.e., f ∗ (3) =
∂S(B) = −k B ln(h3 f(3)) . ∂f(3)
(5.72)
5.6 Kinetic theory |
169
Consequently, it follows that sinh (
1 X(1, 2, 1 , 2 ) ) = sinh ( (− ln f(1) − ln f(2) + ln f(1 ) + ln f(2 ))) 2 2 √f(1 )f(2 ) √ f(1)f(2) 1 √f(1 )f(2 ) ) )= ( − = sinh (ln 2 √f(1)f(2) √f(1)f(2) √f(1 )f(2 ) 1 = (f(1 )f(2 ) − f(1)f(2)) . (5.73) 2√f(1)f(2)f(1 )f(2 )
Therefore, the irreversible part of the Boltzmann equation can be written down as ∂Ξ (B) ∂S ∂ ∂f(1)
= ∫ d2 ∫ d1 ∫ d2
2W(1, 2, 1 , 2 ) (f(1 )f(2 ) − f(1)f(2)) . )f(2 ) √ k f(1)f(2)f(1 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ B
(5.74)
= collision kernel
For concrete calculations the function W expressing the collision kernel has to be supplied, see e.g., [32] or [121], and W is responsible for ensuring the required degeneracies like energy and mass conservation. The final form of the Boltzmann equation with energy (5.68), entropy (2.120) and dissipation potential (4.84) thus reads ∂f 2W(f, 1, 2, 1 , 2 ) p ∂f = − ⋅ + ∫ d2 ∫ d1 ∫ d2 (f(1 )f(2 ) − f(1)f(2)) . (5.75) ∂t m ∂r k B √f(1)f(2)f(1 )f(2 ) ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ = collision kernel
Note also that the thermodynamic potential (2.20) is equal to Φ = −S +
1 p2 μ0 ∫ dr ∫ dp ∫ dr ∫ dp mf(r, p) , f(r, p) − T0 2m T0
(5.76)
and that the function W(1, 2, 1 2 ), which represents differential cross section of a collision, is zero if p21 + p22 ≠ p21 + p22 . Therefore, Equation (5.73) gives the same result with f ∗ = ∂Φ/∂f . The dissipation potential (4.84) is clearly even with respect to TRT since after replacing p with −p the change of variables from p to −p yields the original dissipation potential. See [61] for more details on application of TRT to quantities without definite parity. The second law of thermodynamics is fulfilled due to the convexity of the dissipation potential with respect to the thermodynamic force X. Indeed, it holds that ⟨X, sinh(X)⟩ ≥ 0. Although the derivation of the Poisson bracket (3.99) is valid universally, the Boltzmann equation works well only for very dilute or nearly ideal gases, because when energy is expressed only in terms of the one-particle distribution function interactions cannot be captured exactly. Evolution of condensed matter can be approached in two ways: 1. Spatially nonlocal kinetic theory where two-particle or three-particle distribution functions also play the role of state variables (Section 5.6.3).
170 | 5 Reversible and irreversible evolution
2.
On the less detailed level of fluid mechanics the field of entropy density or energy density may implicitly include the particle interactions.
In summary, the Boltzmann equation consists of a reversible Hamiltonian part and irreversible gradient part. It is applicable for dilute gases, and it is well formulated within GENERIC.
5.6.2 Grad hierarchy As we have already pointed out on several places in this book, to reduce a dynamical theory means to extract a pertinent pattern in solutions of its governing equations. The pattern can be revealed in some coordinate system and remain hidden in others. It is therefore very important to begin the pattern recognition process with an appropriate formulation. For instance, statistical mechanics does not begin with the particle formulation but with its Liouville reformulation (Section 2.7.6). Harold Grad suggested in [122] to begin the process of reducing the Boltzmann kinetic equation to the governing equations of fluid mechanics with a new form of the Boltzmann equation that is now known as Grad’s hierarchy. Cutting the hierarchy (or in other words closing the hierarchy) amounts to recognizing reduced time evolution equations generating the pertinent pattern. This suggestion is based on the observation that the first five equations in the Grad hierarchy are already very close to the governing equations of fluid mechanics. Our objective in this section is to present Grad’s reformulation. We shall not discuss the closures but we shall immerse ourselves in details [120] of the reformulation that have escaped previous investigations. As we have seen in Section 3.6, the nondissipative and the time reversible part of the Boltzmann equation is Hamilton’s equation corresponding to a particular energy (kinetic energy). The Hamiltonian structure is moreover degenerate, which implies entropy conservation. Grad’s reformulation discussed in the following section preserves the Hamiltonian structure, preserves its degeneracy, and allows any choice of the energy. These new features of Grad’s hierarchy throw a new light on the problem of cutting the hierarchy. Allegorically speaking, we are getting to know more about the patient before operating on them. 5.6.2.1 Moments of the distribution function Let M B be the state space of one-particle kinetic theory (i.e., f(r, p) ∈ M B ) and M G be the state space in Grad’s reformulation. The mapping M B → M G is defined by f(r, v) → c(r) M ∋ c(r) = (c(0) (r), . . . , c(∞) (r)) G
(5.77a)
5.6 Kinetic theory
| 171
with moments (i)
c α1 ,...,α i (r) = ∫ dp p α1 . . .p α i f(r, p) ;
i = 0, 1, . . . , ∞ ; α i = 1, 2, 3 .
(5.77b)
Averages c(r) are the moments of the distribution function exactly as in probabilistic theory. We now restrict the kinetic Poisson bracket (3.99) to the functions A and B that depend on f only through its dependence on c. By replacing A f and B f in (3.99) by A f = ∑∞ p α1 . . .p α i we arrive at i=0 A c (i) α1 ,...,α i
∞ ∞
j
(i+j−1)
{A, B}(Gc) = ∫ dr ∑ ∑ ∑ c α1 ,...,α i ,β1 ,...,β k−1 ,β k+1 ,...,β j i=0 j=1 k=1
∂ ∂ ×( (A c (i) ) B c (j) − (B c (i) ) A c (j) ) . α1 ,... ,α i α1 ,...,α i β1 ,...,β j β1 ,... ,β j ∂r β k ∂r β k
(5.78)
This is indeed a Poisson bracket (i.e., in particular that the Jacobi identity holds for 5.78), since we have passed from the Boltzmann Poisson bracket (3.99), which we know is a Poisson bracket, to 5.78 just by a projection (Section 3.5) to the class of admissible functions A and B. The corresponding reversible part of time evolution equations can be obtained as usual from dA (i) ( ċ α1 ,...,α i , ∀A , (5.79) ) = {A, E}(Gc) = ∑ A c (i) α1 ,... ,α i dt rev i which leads to the Grad hierarchy for arbitrary energy (
∞ ∂ ∂c(0) (j−1) (c β1 ,...,β k−1 ,β k+1 ,...,β j E c (j) ) ) =−∑ ∑ β1 ,...,β j ∂t rev ∂r β k j=1 k=1
(
∂c α ) ∂t
j
(1)
∞
j
=−∑ ∑ j=1 k=1
rev
∞
(j)
∂ (j) (c α,β1 ,...,β k−1 ,β k+1 ,...,β j E c (j) ) β1 ,... ,β j ∂r β k
− ∑ c β1 ,...,β j j=0
∂ (E c (j) ) β1 ,... ,β j ∂r α
.. . (N)
(
∂c α1 ,...,α N ) ∂t
∞
j
=−∑ ∑ j=1 k=1
rev
∞ N
∂ (j+N−1) (c α1 ,...,α N ,β1 ,...,β k−1 ,β k+1 ,...,β j E c (j) ) β1 ,...,β j ∂r β k (j+N−1)
− ∑ ∑ c β1 ,...,β j ,α1 ,...,α k−1 ,α k+1 ,...,α N j=0 k=1
.. ..
∂ (E c (j) ) β1 ,...,β j ∂r α k (5.80)
172 | 5 Reversible and irreversible evolution The energy E = ∫ dr e(c(r)) in (5.80) remains undetermined. If we choose it to be the kinetic energy p2 = ∫ dr trc(2) , (5.81) ∫ dr ∫ dp f(r, p) 2m then we arrive at (to simplify the notation we put hereafter m = 1, where m is the mass of one particle) (1)
(
∂c(0) ∂c ) =− α ∂t rev ∂r α
(
∂c α1 ) ∂t
(1)
(2)
=−
∂c α1 ,α2 ∂r α2
=−
∂c α1 ,...,α N+1 ∂r α N+1
rev
.. . (N+1)
(N)
(
∂c α1 ,...,α N ) ∂t
rev
.. ..
(5.82)
Equations (5.82) represent the classical Grad hierarchy, which can also be obtained by multiplying ∂f/∂t = −∂/∂r α (p α f) successively by 1, p α1 , p α1 p α2 , . . . and integrating over p. We have thus derived above the Grad hierarchy for arbitrary energy and proven that the classical Grad hierarchy (its special case corresponding to the special choice of the energy) has Hamiltonian structure. 5.6.2.2 Grad hierarchy with entropy Now we turn to the degeneracy of the Poisson bracket (5.78). We have seen in kinetic theory (Section 3.6) that a function SB (f) = ∫ dr ∫ dp η(f(r, p)), where η : ℝ → ℝ, is a Casimir of the Boltzmann Poisson bracket {A, B}B , i.e., {A, SB } = 0 ∀A. This is a very important property, since it implies that, besides the energy conservation law (which is a consequence of the skew-symmetry of the Poisson bracket, Ė = {E, E}B = 0), there is an infinite number of the conservation laws Ṡ B = 0. It is then one function among SB (namely Boltzmann’s H function (2.120)) that emerges in the investigation of the collisions as the function having the physical interpretation of the entropy (Section 5.6.1). We ask now the question: what is the Casimir of the Poisson bracket (5.78)? In particular, we look for a scalar field s(r), called an entropy field, which is expressed in terms of c(r), and such that its time evolution is governed by a local conservation law (i.e., ∂s/∂t = − div JS ), called a companion conservation law. The vector field JS (r), called an entropy flux, is, as well as s(r), a function of c(r). We suggest s(r) = ∫ dp η(f(r, p)) ,
(5.83)
5.6 Kinetic theory
| 173
since SB (f) = ∫ dr ∫ dp η(f(r, p)) is the Casimir of the kinetic Poisson bracket. In addition to this scalar field, we also introduce fields b(r) = (b (0) (r), b (1) (r)), . . . by (j)
b β1 ,...,β j = ∫ dp η(f(r, p))p β1 . . .p β j ;
f = 0, 1, 2, . . .
(5.84)
Note that b (0) (r) = s(r). Next, we make two observations about b(r). First, we show that they are functions of c(r), and second, we extend the Poisson bracket (5.78) to a new Poisson bracket that also includes the field s(r). We use below the notation: f ∗ = SBf , and c∗ = SGc , where SG (c(f)) = SB (f). The mapping c(r) → b(r) is given by c → c∗ → f ∗ → f → b ,
(5.85)
where the mapping c∗ → f ∗ is given by f ∗ (c∗ ) =
∂SG (c(f)) ∂c(f) ∞ (i)∗ = ∑ c α1 ,...,α i (r)p α1 , . . . , p α i . ∂c(f) ∂f i=0
(5.86)
With the extended set of moments (c(r), s(r)) we follow the steps that led us to (5.78) and arrive (after lengthy calculations – see [120] and Appendix in [123]) at ∞
i
∂A s ∂B s B c (i) − A (i) ) . α ,...,α 1 i ∂r α k ∂r α k c α1 ,... ,αi i=1 k=1 (5.87) The hierarchy corresponding to the bracket (5.87) has the form (i−1)
{A, B}B = {A, B}(Gc) + ∫ dr ∑ ∑ b α1 ,...,α k−1 ,α k+1 ,...α i (
(
∞ ∂ ∂s (j−1) (jb β1 ,...,β j−1 E c (j) ) ) =−∑ α,β1 ,... ,β j−1 ∂t rev ∂r α j=1
∞ ∂c(0) ∂ (j−1) (c β1 ,...,β k−1 ,β k+1 ,...,β j E c (j) ) ) =−∑ ∑ β1 ,... ,β j ∂t rev ∂r βk j=1 k=1 j
(
.. . (N)
(
∂c α1 ,...,α N ) ∂t
∞
j
=−∑ ∑ j=1 k=1
rev
∞ N
∂ (j+N−1) (c α1 ,...,α N ,β1 ,...,β k−1 ,β k+1 ,...,β j E c (j) ) β1 ,... ,β j ∂r β k (j+N−1)
− ∑ ∑ c β1 ,...,β j ,α1 ,...,α k−1 ,α k+1 ,...,α N j=0 k=1 N
(N−1)
− ∑ b α1 ,...,α k−1 ,α k+1 ,...,α N k=1
.. .,
∂ (E c (j) ) β1 ,... ,β j ∂r α k
∂E s ∂r α k (5.88)
174 | 5 Reversible and irreversible evolution
where we used the commutativity in the definition of c, b E c (j)
α1 ,... ,α k−1 ,α k ,α k+1 ,... ,α j
= E c (j)
(5.89)
α,β1 ,... ,β j−1
with α = α k and β i = α i , i < k, β i = α i+1 , i > k. The energy E appearing in (5.88) is now a function of the fields (c(r), s(r)). We proceed now to investigate properties of solutions of (5.88). 5.6.2.3 Mass conservation The second equation in (5.88) is in the form of the local conservation law (
(0)
∂c(0) ∂J α , ) =− ∂t rev ∂r α
(5.90)
where we again used the symmetry properties of c to identify the flux as ∞
(0)
(j−1)
J α = ∑ jc β1 ,...,β j−1 E c (j)
.
(5.91)
α,β1 ,... ,β j−1
j=1
If we interpret physically c(0) (r) as the mass density, then Equation (5.90) expresses the mass conservation and J(0) is the mass flux. We note, in particular, that the mass flux is not only the momentum field (as it is in the classical Grad hierarchy – Equations (5.82)), but it involves all the higher order Grad fields on which the energy E(c) depends. This observation of a possible extra mass flux was made also in [124]. 5.6.2.4 Entropy conservation In addition, the first equation in (5.88) is a local conservation law ( where
(s)
∂s ∂J ) =− α , ∂t rev ∂r α
∞
(s)
(5.92)
(j−1)
J α = ∑ jb β1 ,...,β j−1 E c (j)
(5.93)
α,β1 ,...,β j−1
j=1
is the entropy flux. Equation (5.92) is a companion conservation law, since the entropy s is a function of c. It is a local conservation law implied by the equations governing the time evolution of c(r). 5.6.2.5 Momentum conservation The third equation in (5.88) can also be cast into a local conservation law: (
(1)
∂c α ) ∂t
rev
(1)
=−
∂J α,β ∂r β
,
(5.94)
5.6 Kinetic theory
| 175
where (1)
J αβ = pδ αβ + σ αβ ∞
(j)
σ αβ = ∑ jc α,β1 ,...,β j−1 E c (j)
β,β1 ,...,β j−1
j=1 ∞
(j)
p = −e + sE s + ∑ c β1 ,...,β j E c (j) j=0
.
(5.95)
β1 ,...,β j
We have used the relation s
∞ ∂ ∂ ∂p (j) E s + ∑ c β1 ,...,β j (E c (j) )= , β ,... ,β ∂r α ∂r α ∂r α 1 j j=0
(5.96)
which is analogous to the construction of generalized pressure everywhere in this book, e.g., Equation (3.116b). If we interpret c(1) as momentum density then 5.94 expresses the momentum conservation, p is the scalar hydrodynamic pressure, and σ is the stress tensor. 5.6.2.6 Energy conservation The energy E(c) is conserved, since the bracket {A, B}(Gc) given in 5.78 is a Poisson bracket and Ė = {E, E}(c) = 0 due to its antisymmetry. This equation, written as a local conservations, has the form (e) ∂J ∂e (5.97) ( ) =− α , ∂t rev ∂r α where ∞ ∞
(e)
j
(i+j−1)
J α = (e+p)E c (1) +σ αi E c (1) + ∑ ∑ ∑ c α1 ,...,α i ,β1 ,...,β k−1 ,β k+1 ,...,β j E c (i) α
i
i=0 j=2 k=1
α1 ,...,α i
E c (j)
.
β1 ,... ,β k−1 ,α,β k+1 ,... ,β j
(5.98) 5.6.2.7 Summary Summing up, we propose to use the Grad hierarchy (5.88) rather than its classical version (5.82) or its Hamiltonian version (5.80) with an arbitrary energy as a point of departure for discussing dissipation and reductions (closures). The Grad reformulation (5.88) preserves the Hamiltonian structure of the Boltzmann equation, allows any energy, and includes the entropy conservation. We note that the entropy flux appearing in the equation governing the time evolution of the entropy field appears also in the equations governing the time evolution of c(r). We see that the closures therefore have to be specified for both the higher order fields in c and the moments b appearing in the entropy flux and that the closures made for the entropy flux directly influence the time evolution of the entropy s and also the time evolution of the fields c. This is not seen in the classical hierarchies (5.82) and (5.80).
176 | 5 Reversible and irreversible evolution
5.6.3 One-and-two-point kinetic theory The one-particle distribution function is insufficient for taking into account interaction energy of the particles. On the other hand, the N-particle distribution function, evolution of which is given by the Liouville equation, contains too much detail, which makes the Liouville equation too difficult to solve. A reasonable compromise is to work with one-and-two-particle distribution functions, ρ 1 (r, p) and ρ 2 (1, 2) with 1 = (r1 , p1 ) and 2 = (r2 , p2 ). The two-particle distribution function ρ 2 (1, 2) is symmetric with respect to swapping 1 ↔ 2. The one-and-two distribution function is constructed as a combination of the one-particle distribution function and two-particle distribution function within the grand canonical Grad hierarchy formulated in [39]. The Poisson bracket in the one-and-two-point kinetic theory is {A(ρ 1 , ρ 2 , . . . ), B(ρ 1 , ρ 2 , . . . )} + ∫ d1 ∫ d2 ρ 2 (1, 2) ( + ∫ d1 ∫ d2 ρ 2 (1, 2) ( + ∫ d1 ∫ d2 ρ 2 (1, 2) (
∂ ∂r1k
(1&2)
= ∫ d1 ρ 1 (1) (
A ρ1 (1)
∂ ∂r1k ∂ ∂r1k
∂ ∂r1k
A ρ1 (1)
∂ B ρ1 (1) − . . . ) ∂p1k
∂ (B ρ2 (1,2) + B ρ2 (2,1) ) − . . . ) ∂p1k
(A ρ2 (1,2) + A ρ2 (2,1) )
∂ (B ρ1 (1) ) − . . . ) ∂p1k
(A ρ2 (1,2) + A ρ2 (2,1) )
∂ (B ρ2 (1,2) + B ρ2 (2,1) ) − . . . ) ; ∂p1k (5.99)
see e.g., [39]. The reversible evolution equations implied by bracket (5.99) are ∂ρ 1 (1) ∂ ∂ ∂ ∂ = − k (ρ 1 (1) 1 E ρ1 (1) ) + (ρ 1 (1) k E ρ1 (1) ) 1 ∂t ∂p k ∂p k ∂r1 ∂r1 − 2 ∫ d2 + 2 ∫ d2
∂ ∂r1k
(ρ 2 (1, 2)
∂ E ρ2 (1,2) ) ∂p1k
∂ ∂ (ρ 2 (1, 2) k E ρ2 (1,2) ) 1 ∂p k ∂r1
∂ ∂ ∂ ∂ρ 2 (1, 2) ∂ (ρ 2 (1, 2) k E ρ1 (1) ) + (ρ 2 (1, 2) k E ρ1 (2) ) = 1 2 ∂t ∂p k ∂p k ∂r1 ∂r2 −
∂ ∂r1k
−2
(ρ 2 (1, 2)
∂ ∂r1k
∂ ∂ ∂ E ρ1 (1) ) − k (ρ 2 (1, 2) 2 E ρ1 (2) ) ∂p1k ∂p k ∂r2
(ρ 2 (1, 2)
∂ E ρ2 (1,2) ) ∂p1k
(5.100a)
5.7 Complex fluids | 177
−2
∂ ∂r2k
(ρ 2 (1, 2)
∂ E ρ2 (1,2) ) ∂p2k
+2
∂ ∂ (ρ 2 (1, 2) k E ρ2 (1,2) ) 1 ∂p k ∂r1
+2
∂ ∂ (ρ 2 (1, 2) k E ρ2 (1,2) ) . 2 ∂p k ∂r2
(5.100b)
The first equation consists of the evolution for the one-particle distribution function (3.101) and a term coupling it with ρ 2 . The second equation consists of the antisymmetric coupling term and a term coupling ρ 2 with itself.
5.7 Complex fluids “Upon collecting a basinful, and allowing it to settle thoroughly, we perceived that the whole mass of liquid was made up of a number of distinct veins, each of a distinct hue; that these veins did not commingle; and that their cohesion was perfect in regard to their own particles among themselves, and imperfect in regard to neighbouring veins. Upon passing the blade of a knife athwart the veins, the water closed over it immediately, as with us, and also, in withdrawing it, all traces of the passage of the knife were instantly obliterated. If, however, the blade was passed down accurately between the two veins, a perfect separation was effected, which the power of cohesion did not immediately rectify. The phenomena of this water formed the first definite link in that vast chain of apparent miracles with which I was destined to be at length encircled.” – E. A. Poe, The Narrative of Arthur Gordon Pym of Nantucket
Newton’s mechanics was transposed from particles to continuum by Leonhard Euler in [125]. The resulting theory, supplemented later with the Navier–Stokes dissipative term, has been found to describe well the observed flow behavior of water and of similar fluids called simple fluids. It has, however, always been known that some fluids (among them are most of the biological fluids, for instance egg white) flow very differently to water. For instance, experimental observations of many of these fluids show that the higher the shear stress, the easier they flow. Many of them, for example the egg white, also show elastic responses to externally imposed deformations. The scientific interest in such fluids, called complex fluids, started to emerge around 1920, in particular by investigations of Eugen Cook Bingham. Observations of flows that differ substantially from the familiar flow of water were, however, described before. For example Edgar Allan Poe in his novel The Narrative of Arthur Gordon Pym of Nantucket (that appeared in 1835) describes an adventure in which the protagonist in the novel enters a new land in which everything, including the flow in the rivers, is slightly altered. The flows described in the novel are flows of complex fluids. See also Section 5.3.3.3 for further details on the motivation. The adaptations, both in experimental and theoretical investigations, needed to bridge from classical fluid mechanics to the mechanics of complex fluids appeared to
178 | 5 Reversible and irreversible evolution
be substantial. It was therefore felt that the new field deserves a new name. Bingham suggested the name rheology. The emergence of plastics after the Second World War gave enormous importance to the study of rheology. In order to make objects from plastics, the plastic material has to be melted and fed into molds or extruded. Its flow is, however, very different from the familiar flows of simple fluids as it is an example of a complex fluid. Due to the enormous quantity of the plastic material, any improvement in the plastic processing operations was rewarded by a large financial gain. A part of this financial resource was then used to support research in rheology. In the theoretical investigations, the essential new feature required in rheology is the enlargement of the state variables. In addition to the fields of mass, momentum, and energy (describing the overall features in the fluid mechanics of simple fluids) some quantities that can describe the internal structure of the complex fluids are needed. The overall time evolution cannot be decoupled in the complex fluids from the time evolution of its internal structure. For example, if the complex fluid under consideration is a suspension of fibers then the extra state variable is a distribution function of the orientation of the fibers (or alternatively some of its moments) and the equations governing its time evolution (that is, coupled to the equations governing the time evolution of the fields of mass, momentum and energy) is the new extra governing equation. There are two sources of motivation for making the extensions from simple to complex fluids. One is the microscopic physics of the fluids (i.e., relying on reductions from more detailed levels) and the other the structures and the concepts that have emerged in classical fluid mechanics and the related thermodynamics (i.e., relying on extensions from the level of fluid mechanics). The fundamental basis for the former type of extensions was provided by John Gamble Kirkwood in [106] and [107] in his investigation of the passage from the BBGKY hierarchy (the hierarchy of the equations governing the time evolution of one-particle, two-particle, etc., distribution functions) to fluid mechanics. Kirkwood’s approach was then carried to rheology in [108]. The latter type of extensions have been developed for example in [126, 127] and [128]. An application of the GENERIC viewpoint to rheology was initiated in [129]. A further development of the GENERIC rheological modeling is described in [72, 130] and [131]. The clarity of combining mechanics (that is partially responsible for instance for the elasticity) with thermodynamics (that is also partially responsible for the elasticity and also for the Brownian motion and heat involved in flows) that GENERIC brings is one of the main gains. Below, we shall develop some simple rheological models that arise as particular realizations of the GENERIC structure.
5.7.1 Weak nonlocality in space and momentum The one-point and two-point distribution functions can be projected to the field of fluid mechanics and tensors expressing space-space, momentum-momentum and
5.7 Complex fluids |
179
space-momentum correlations: ρ(r) = ∫ dp mρ1 (r, p)
(5.101a)
u i (r) = ∫ dp p i ρ 1 (r, p)
(5.101b)
s(r) = ∫ dp σ (ρ 1 (r, p) − ∫ dr ∫ dp ρ 2 (r, p, r , p ))
(5.101c)
c ij (r) = ∫ dR ∫ dp ∫ dP R i R j ρ̄ 2 (r, R, p, P)
(5.101d)
R ij (r) = ∫ dR ∫ dp ∫ dP P i P j ρ̄ 2 (r, R, p, P)
(5.101e)
w ij (r) = ∫ dR ∫ dp ∫ dP R i P j ρ̄ 2 (r, R, p, P) ,
(5.101f)
where R, r, P and p are related to 1 and 2 by 1 r = (r1 + r2 ) , p = p1 + p2 , 2 1 R = r2 − r1 , P = (p2 − p1 ) , 2 and
(5.102a) (5.102b)
R p R p ρ̄ 2 (r, R, p, P) = ρ 2 (r − , − P, r + , + P) . ⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟ 2 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ 2 2 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ 2 r1
p1
r2
(5.102c)
p2
Fields ρ, u and s are the density, momentum density and entropy density. Tensor field c ij (r) is the field of the conformation tensor expressing space-space correlations, field R ij (r) is the Reynolds stress tensor expressing momentum-momentum correlations, and field w ij (r) is the field of nonlocal vorticity expressing momentum-space correlations. After plugging functionals dependent only on fields (5.101), x = (ρ, u, s, c, R, w), into Poisson bracket (5.99), the bracket turns into {A(x), B(x)} = {A, B}(FM) + ∫ dr c ij (∂ k A c ij B u k − ∂ k B c ij A u k ) + ∫ dr R ij (∂ k A R ij B u k − ∂ k B R ij A u k ) + ∫ dr w ij (∂ k A w i B u k − ∂ k B w i A u k ) j
j
+ ∫ dr c ij ((A c kj + A c jk )∂ i B u k − (B c kj + B c jk )∂ i A u k ) − ∫ dr R ij ((A R kj + A R jk )∂ k B u i − (B R kj + B R jk )∂ k A u i ) j
+ ∫ dr w ij (A w k ∂ i B u k − B w k ∂ i A u k ) − w i (A w j ∂ k B u i − B w j ∂ k A u i ) j
+ 2 ∫ dr
j wi
j
k
k
((A c kj + A c jk ) (B R ki + B R ik ) − (B c kj + B c jk ) (A R ki + A R ik ))
180 | 5 Reversible and irreversible evolution
+ 2 ∫ dr c ji ((A c kj + A c jk ) B w i − (B c kj + B c jk ) A w i ) k
k
+ 2 ∫ dr R ji (A w k (B R ki + B R ik ) − B w k (A R ki + A R ik )) j
+ 2 ∫ dr
w ij
j
(A w k B w i − B w k A w i ) , j
k
j
k
(5.103)
where {A, B}(FM) is the Poisson bracket of fluid mechanics, Equation (3.110). This bracket was derived in [132] and in [39] including the entropy density. A remarkable feature of this bracket is that coupling between the tensor fields is expressed explicitly. But since the overall evolution equations taking into account all the coupling effects would be rather complex, let us focus on further simplifications of the Poisson bracket.
5.7.2 Conformation tensor First, our objective will be to demonstrate the part of Poisson bracket (5.103) that depends on the state variables of fluid mechanics and conformation tensor c. Dependence of entropy on the conformation tensor has already been discussed in Section 2.7.13, and the Poisson bracket in Section 3.8.6. Let us now add some dissipation. 5.7.2.1 Reversible evolution By letting the functionals depend only on field x = (ρ, u, s, c), bracket (5.103) becomes {A, B}(c) = {A, B}(FM) + ∫ dr c ij (∂ k A c ij B u k − ∂ k B c ij A u k ) + ∫ dr c ij ((A c kj + A c jk ) ∂ i B u k − (B c kj + B c jk ) ∂ i A u k ) ,
(5.104)
where c ij was identified with c ij for simplicity of notation. This bracket is equivalent to the Poisson bracket for the LCG tensor (3.162) through the transformation (3.168) as shown in Section 3.8.6. The one-and-two-particle kinetic theory is thus an alternative method for derivation of the bracket, derived in [133]. Reversible evolution equations for state variables x implied by bracket (5.104) are ∂ρ = −∂ i (ρE u i ) ∂t ∂u i = −∂ j (u i E u j ) − ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s ∂t − c jk ∂ i E c jk + ∂ k (c kj (E c ij + E c ji )) ∂s = −∂ i (sE u i ) ∂t ∂c ij = −∂ k (c ij E u k ) + c kj ∂ k E u i + c ki ∂ k E u j , ∂t where E is the total energy of the system.
(5.105a)
(5.105b) (5.105c) (5.105d)
5.7 Complex fluids | 181
With energy E = ∫ dr [
u2 + ε(ρ, s, c)] , 2ρ
(5.106)
where internal energy ε still remains unspecified, evolution equation (5.105d) can be rewritten in terms of the upper convected time-derivative as ∇
c = −c div v ,
v=
u , ρ
(5.107)
which is the reversible part of the Maxwell rheological model [108]. In the entropic representation, where state variables are (ρ, u, e, c), and conjugate variables are derivatives of entropy, the evolution equations (5.105) become Su ∂ρ = ∂ i (ρ i ) ∂t Se S uj S c kj Sρ Su ∂u i 1 = ∂ j (u i i ) + ρ∂ i + uj ∂i + c kj ∂ i − s∂ i ∂t S e ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ Se Se Se Se
(5.108a)
−∂ i p
∂c ij ∂t ∂e ∂t
S c ij + S c ji − ∂ k (c kj ) Se S uj Su Su = ∂ k (c ij k ) − c kj ∂ k i − c ki ∂ k Se Se Se S ui S uj S c ij S u k S ρ S ui ) − ∂ k (c ij ) = −∂ i (ρ 2 ) − ∂ j (u i 2 Se Se S2e S c ij S u i Su ) + ∂ i (s(ρ, u, e, c) 2i ) + ∂ k (c kj Se S2e S c ji S u i ) , + ∂ k (c kj S2e
(5.108b) (5.108c)
(5.108d)
where we used that ė =
∂e ∂e ∂e ∂e ρ̇ + ṡ + u̇ i + ċ ij ∂ρ ∂u i ∂s ∂c ij
= ρ † ρ̇ + u †i u̇ i + s† ṡ + c†ij ċ ij ,
(5.108e)
and where pressure is given by p=
1 (s − ρS ρ − u j S u j − eS e − c ij S c ij ) . Se
(5.108f)
This construction of pressure is equivalent to the usual construction of pressure, e.g., Equation (3.116b).
182 | 5 Reversible and irreversible evolution
5.7.2.2 Irreversible evolution Let entropy be given by Equation (5.60) expressed in terms of the conformation tensor, 1 u2 1 S = ∫ dr [ nk B ln det c + s (n, e − − H tr c)] . 2 2ρ 2
(5.109)
Note that the dependence s(n, ε) on the dumbbell concentration n is slightly different than in the context of Equation (5.60). The dumbbell concentration can be either assumed constant, passively advected as an extra density-like field, or identified with density via ρ = mn. Parameter H is again the spring constant of the dumbbells. The derivative of this entropy with respect to c is (using the Jacobi formula (3.182)) c∗ij =
∂S 1 1H = k B nc−1 ij − 2 T δ ij , ∂c ij 2
(5.110)
which is equal to zero for k B Tn I. (5.111) H This is the MaxEnt value of c, which is equivalent to the MaxEnt value of the LCG tensor (5.61). Dissipation potential can be prescribed as c̃ =
Ξ(c) = ∫ dr Λ c c ij c∗ik c∗jk , the derivative of which is
(c)
Ξ c ∗ = 2Λ c c ik c∗kj .
(5.112)
(5.113)
ij
Note that c ij was identified with c ij for simplicity of notation. Dissipation potential (5.112) is quadratic in c∗ and can be thus represented by a dissipative bracket. The evolution equation of c then obtains an irreversible term, ∂Ξ(c) ∂c∗ij c
=− ∗ =S c
Λc H k B Tn (c ij − δ ij ) . T H
(5.114)
Gradient dynamics with dissipation potential (5.112) can be transformed into the energetic representation, and Equations (4.57) then become (∂ t c ij )irr = 2Λ c c ik c∗kj H k B Tn (c ij − δ ij ) T H ∂s ∂s ∂s ∂s (e)̇ irr + (ρ)̇ irr + = (ċ ij )irr + (u̇ i )irr ⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂e = 0 ∂c ij ∂ρ = 0 ∂u i = 0 = −Λ c (∂ t s)irr
= c∗ij (ċ ij )irr = 2Λ c c∗ij c ik c∗kj =
k B Tn −1 k B Tn −1 Λc H2 c ) ⋅ c ⋅ (I − c ) (I − T H 2T 2
(5.115a) (5.115b)
5.7 Complex fluids | 183
=
Λc H2 k B Tn −1 k B Tn (I − c ) ⋅ (c − I) 2 H H 2T
=
k B Tn k B Tn 2 −1 Λc H2 (c − 2 I + ( ) c ) , H H 2T 2
(5.115c)
which are the irreversible parts of evolution of c and entropy (entropy production). By combining reversible evolution (5.105) with the irreversible (5.115), the GENERIC evolution equations become ∂ρ = − div (ρv) ∂t ∂u − k B TnI)) = − div (ρv ⊗ v) + div (−p(FM) + (Hc ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂t =σ ∂s k B Tn Λc H2 k B Tn 2 −1 (c − 2 = − div (sv) + I + ( ) c ) ∂t H H 2T 2 ∇ H k B Tn c = −c div v − Λ c (c − I) , T H
(5.116a) (5.116b) (5.116c) (5.116d)
where the hydrodynamic pressure (3.116b) and the Maxwell extra stress tensor σ (part of total Cauchy stress (3.184)) stand on the right hand side of the momentum equation. The equation for the conformation tensor is expressed by means of the upper convected derivative (3.164). In particular, the evolution equation for the extra Maxwell stress tensor can be obtained from Equations (5.116), ∇
σ = 2k B TnD − Λ c T −1 Hσ ,
(5.117)
where incompressibility (div v = 0) and constantness of temperature and spring constant H were assumed. Equation (5.117) is the evolution equation for the Maxwell extra stress frequently used in literature, e.g., [108]. 5.7.2.3 Reduction to hydrodynamics Let us now apply the dynamic MaxEnt reduction for relaxation of the fast variable c. In the energetic representation reversible equations (5.105) and irreversible equations (5.115) together are ∂ρ ∂t ∂u i ∂t ∂s ∂t ∂c ij ∂t
= −∂ i (ρu †i )
(5.118a)
= −∂ j (u i u †j ) − ρ∂ i ρ † − u j ∂ i u †j − s∂ i s† − c jk ∂ i c†jk + ∂ k (c kj (c†ij + c†ji ))
(5.118b)
= −∂ i (su †i ) + 2
Λc † c c ik c†kj (s† )2 ij
= −∂ k (c ij u †k ) + c kj ∂ k u †i + c ki ∂ k u †j −
(5.118c) 2Λ c c ik c†kj . s†
(5.118d)
Consider now the isothermal incompressible case, i.e., S e = T = const., n = const. and div u† = 0. Equations (5.118b) and (5.118d) at the MaxEnt value of c (given by
184 | 5 Reversible and irreversible evolution
Equation (5.111)) become ∂u i = −∂ j (u i u †j ) − ρ∂ i ρ † − u j ∂ i u †j − s∂ i s† ∂t k B Tn k B Tn ∂ i tr c† + ∂ k (c†ik + c†ki ) − H H Λc 0 = ∂ j u †i + ∂ i u †j − 2 c†ij . T
(5.119a) (5.119b)
The last equation has a solution c† =
T (∇u† + (∇u† )T ) , 2Λ c
tr c† = 0 .
(5.120)
By plugging this solution into the equation for momentum density, we obtain the Navier–Stokes equation for momentum density ∂u i kB T 2 n ∂ k (∂ i u †k + ∂ k u †i ) , = −∂ j (u i u †j ) − ρ∂ i ρ † − u j ∂ i u †j − s∂ i s† + ∂t HΛ c
(5.121)
where the coefficient k B T 2 n/HΛ c corresponds to the shear viscosity and u† = Eu = v = u/ρ is the velocity. The dynamic MaxEnt reduction of the conformation tensor leads to the Newtonian shear stress tensor.
5.7.3 Reynolds stress Now we turn to the momentum-momentum correlations of the one-and-two-particle distribution function, which are expressed by the Reynolds stress tensor field R(r). 5.7.3.1 Reversible evolution Choosing functionals that depend on the state variables of fluid mechanics and Reynolds stress (defined in Equations (5.101)), i.e., x = (ρ, u, s, R), bracket (5.103) becomes {A, B}(R) = {A, B}(FM) + ∫ dr R ij (∂ k A R ij B u k − ∂ k B R ij A u k ) − ∫ dr R ij ((A R kj + A R jk ) ∂ k B u i − (B R kj + B R jk ) ∂ k A u i ) .
(5.122)
The reversible evolution equations are then ∂ρ = −∂ i (ρE u i ) ∂t ∂u i = −∂ j (u i E u j ) − ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s ∂t − R kj ∂ i E R kj − ∂ k (R ij (E R kj + E R jk ))
(5.123a)
(5.123b)
5.7 Complex fluids | 185
∂s = −∂ i (sE u i ) ∂t ∂R ij = −∂ k (R ij E u k ) − R kj ∂ i E u k − R ki ∂ j E u k . ∂t
(5.123c) (5.123d)
Changing variables to (ρ, u, e, R), e being local total energy density, i.e., E = ∫ dr e(r) ,
(5.124)
evolution equations (5.123) become Su ∂ρ = ∂ i (ρ i ) ∂t Se S uj S uj S R kj Sρ ∂u i 1 ) + ρ∂ i + uj ∂i + R kj ∂ i − s∂ i = ∂ j (u i ∂t S e ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ Se Se Se Se
(5.125a)
−∂ i p
∂R ij ∂t ∂e ∂t
S R kj + S R jk + ∂ k (R ij ) Se Su Su Su = ∂ k (R ij k ) + R kj ∂ i k + R ki ∂ j k Se Se Se S ui S uj S R ij S u k S ρ S ui = −∂ i (ρ 2 ) − ∂ j (u i 2 ) − ∂ k (R ij ) Se Se S2e Su + ∂ i (s(ρ, u, e, R) 2i ) Se S R ij S u k S R ij S u k ) − ∂ j (R ki ) , − ∂ i (R kj 2 Se S2e
(5.125b) (5.125c)
(5.125d)
where pressure is given by p=
1 (s − ρS ρ − u j S u j − eS e − R ij S R ij ) . Se
(5.125e)
5.7.3.2 Irreversible evolution Let entropy be given by S(R) = ∫ dr [s (ρ, e −
u2 1 1 ρ R ] , − tr R) + k B ln det 2ρ 2m 2 m QR
(5.126)
where Q R is an appropriately chosen constant. The reason for this entropy is analogous to the entropy (5.109), which was derived in Section 2.7.13. Derivative of entropy (5.126) with respect to R is R∗ij =
∂S(R) 1 k B ρ −1 S e δ ij + (R )ij , =− ∂R ij 2m 2m
(5.127)
which is equal to zero if and only if R ij = k B Tρδ ij .
(5.128)
186 | 5 Reversible and irreversible evolution
This is the MaxEnt value of R, at which the Reynolds stress is proportional to the unit matrix. Similarly as in the preceding section, we choose dissipation potential Ξ(R) = ∫ dr Λ R R∗ij R jk R∗ki , the derivative of which is
(R)
Ξ R∗ = 2Λ R R jk R∗ki .
(5.129)
(5.130)
ij
Note that R ij was identified with R ij and similarly for R∗ for simplicity of notation. The evolution equation of R then gains an irreversible term ∂Ξ(R) ΛR =− (R − k B TρI) . ∗ ∂R ij R∗ =S Tm
(5.131)
R
In the energetic representation, Equations (4.57) become ΛR R jk R†ki s† ∂s ΛR = (∂ t R ij )irr = 2 † 2 R†ij R jk R†ki , ∂R ij (s )
(∂ t R ij )irr = −2 (∂ t s)irr
(5.132a) (5.132b)
which are the irreversible parts of evolution of R and entropy (entropy production). By combining the reversible evolution (5.123) and irreversible (5.132), we obtain ∂ρ = −∂ i (ρE u i ) ∂t ∂u i = −∂ j (u i E u j ) − ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s ∂t − R kj ∂ i E R kj − ∂ k (R ij (E R kj + E R jk )) ∂s ΛR E R R jk E R ki = −∂ i (sE u i ) + 2 ∂t (E s )2 ij ∂R ij = −∂ k (R ij E u k ) − R kj ∂ i E u k − R ki ∂ j E u k ∂t ΛR −2 R jk E R ki , Es
(5.133a)
(5.133b) (5.133c)
(5.133d)
which are the GENERIC evolution equations for fluid mechanics with Reynolds stress. For instance, the last equation can be rewritten as ∂R ij ΛR = −∂ k (R ij v k ) − R kj ∂ i v k − R ki ∂ j v k − (R − k B TρI) , ∂t Tm
(5.134)
from which the tendency to relaxation of the Reynolds stress tensor to the respective MaxEnt value is obvious. As in the case of the conformation tensor in Section 5.7.2, let us now show how the Reynolds stress relaxes. The MaxEnt value (5.128) can be plugged into Equa-
5.7 Complex fluids | 187
tions (5.133). Assuming isothermal incompressible flow, ρ = const., div u† = 0 and S e = T = const., the equations become ∂u i = −∂ j (u i u †j ) − ρ∂ i ρ † − u j ∂ i u †j − s∂ i s† ∂t − k B Tρ∂ i R†kk − k B Tρ∂ k (R†ki + R†ik ) 0=
−k B Tρ (∂ i u †j
+
∂ j u †i )
− 2Λ R k B ρR†ji
.
(5.135a) (5.135b)
The last equation has a solution T (∇u† + (∇u† )T ) R̃ † = − 2Λ R
and
tr R̃ = 0 .
(5.136)
Plugging this solution back into the equation for u leads to ∂u i kB T 2 ρ ∂ k (∂ k u †i + ∂ i u †k ) , = −∂ j (u i u †j ) − ρ∂ i ρ † − u j ∂ i u †j − s∂ i s† + ∂t ΛR
(5.137)
which is again the Navier–Stokes equation with shear viscosity. Relaxation of Reynolds stress thus leads to extra (also called turbulent) viscosity by means of the dynamic MaxEnt reduction. However, full equations (5.133) should be solved in general, since the Navier–Stokes equation with turbulent viscosity applies only after the Reynolds stress tensor has relaxed to the quasiequilibrium value.
5.7.4 Nonlocal vorticity Finally, taking the state variables of fluid mechanics and the nonlocal vorticity tensor, i.e., x = (ρ, u, s, w), Poisson bracket (5.103) becomes {A, B} = {A, B}(FM) + ∫ dr w ij (∂ k A w i B u k − ∂ k B w i A u k ) − j
j
+ ∫ dr
j wi
(∂ k A u i B w j − ∂ k B u i A w j )
+ ∫ dr
w ij
(A w k ∂ i B u k − B w k ∂ i A u k )
+ ∫ dr
2w ij
k
k
j
j
(A w k B w i − B w k A w i ) . j
k
j
(5.138)
k
This is the Poisson bracket for fluid mechanics equipped with the nonlocal vorticity field w defined by Equations (5.101). The evolution equations are then ∂ρ = −∂ i (ρE u i ) ∂t ∂u i = −∂ j (u i E u j ) − ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s ∂t j
− w kj ∂ i E w k − ∂ k (w i E w j − w kj E w i ) j
k
j
(5.139a)
(5.139b)
188 | 5 Reversible and irreversible evolution ∂s = −∂ i (sE u i ) ∂t ∂w ij = −∂ k (w ij E u k ) − w ik ∂ j E u k + w kj ∂ k E u i ∂t + 2w kj E w k − 2w ik E w j . i
(5.139c)
(5.139d)
k
These are the evolution equations for fluid mechanics with nonlocal vorticity. The evolution equations, however, have not yet been analyzed, and we leave it for future research.
5.8 Symmetric hyperbolic thermodynamically consistent (SHTC) equations Solid dynamics is naturally formulated in the Lagrangian coordinates. However, treatment of excessively large (finite) deformations in the Lagrangian frame is challenging for the numerical treatment because the mesh becomes highly distorted. Thus, the necessity of modeling large elastoplastic deformations in metals under extreme loading conditions [134] was one of the main motivation for S. K. Godunov and E. Romenski to formulate solid dynamics equations in Eulerian settings. At that time, Eulerian solid dynamics was already developed by Wilkins [135], which is based on the stress deviator time evolution with an ideal plasticity von Mises criteria (this model is known to suffer from several issues such as inconsistency with the second law and an infinite number of objective time rates for the stress deviator). The models that use the stress tensor as the state variable are known nowadays as hypoelastic type models. It has however not been clear how to symmetrize hypoelastic models (make them symmetric hyperbolic). In [136], Godunov and Romenski proposed their formulation of Eulerian solid dynamics that employs the hyperelastic formulation of nonlinear elasticity, i.e., when a strain tensor is used as the state variable while the stress-strain relation is defined via a proper definition of the internal energy as a function of strains. The hyperelastic formulation of solid dynamics was of course known way before, but the novelty of the approach was the use of a relaxation procedure for modeling the plastic deformation, which implies the finiteness characteristic time of relaxing the stress on the yield surfaces (inspired by the Maxwell model of viscoelasticity). The relation between hypoand hyperelastic formulation was clarified to some degree by Romenski in [137]. Godunov and coauthors carried out extensive research for experimental definitions of the relaxation time [138–140]. In the original paper [136], Godunov and Romenski used a symmetric metric tensor, however it soon became clear that the use of this symmetric tensor does now allow us to symmetrize the equations, and hence this tensor was replaced with a nonsymmetric matrix, which they called the distortion (Section 3.8.3). Distortion is not a rank 2
5.8 Symmetric hyperbolic thermodynamically consistent (SHTC) equations | 189
tensor; it rather transforms like a vector. Lagrangian hyperelastic equations satisfy the Godunov–Boilat theorem [43, 141, 142] and can be thus symmetrized. The Eulerian equations, on the other hand, do not satisfy the assumptions of the theorem (due to the source terms), and can be symmetrized only in an extended sense [43, 143, 144]. Plastic flow is then simply an algebraic irreversible term in the equation for the distortion matrix (3.153d). See also [145] and [46]. A feature of SHTC equations is that they exclude the Navier–Stokes equation. On the other hand, to recover viscous behavior within the SHTC framework, equations for the fields of fluid mechanics are solved together with the field of distortion with an algebraic dissipative term. The reversible part of the equations is constituted by Equations (3.153) while the irreversible part is generated by dissipation potential Ξ = ∫ dr
1 ∗ ∗ A A , 2τ ij ij
(5.140)
where τ is a parameter (interpreted as relaxation time), which is proportional to viscosity after a reduction to the Navier–Stokes system (see e.g., Section 5.5 or [146]). The GENERIC (and also SHTC) evolution equations (using the energetic representation (4.57)) are then ∂ρ = −∂ i (ρE u i ) ∂t ∂u i = −∂ j (u i E u j ) − ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s ∂t − A ji ∂ k E A jk − (∂ k A ji − ∂ i A jk )E A jk = −∂ i p − ∂ j (u i E u j ) + ∂ j σ ij 1 ∂s EA EA = −∂ i (sE u i ) + ∂t τ(E s )2 ij ij ∂A ik 1 EA , = −∂ k (A ij E u j ) + (∂ k A ij − ∂ j A ik )E u j − ∂t τE s ik
(5.141a)
(5.141b) (5.141c) (5.141d)
where p = ρE ρ + sE s + u i E u i + A ij E A ij − e ,
σ ij = −A ki E A kj + A kl E A kl δ ij .
(5.141e)
Following [146]), the energy can be chosen as E = ∫ dr [
u2 + ε(ρ, s) + ε(v) (ρ, A, s)] , 2ρ
(5.142a)
where the part dependent on the distortion matrix is ε(v) =
c2s T tr ((dev(B−1 )) ⋅ dev(B−1 )) , 4
(5.142b)
c s being the shear sound speed and B the left Cauchy–Green tensor (3.160), B = A−1 ⋅ A−T . This makes it possible to recover viscous behavior of the solutions while keeping hyperbolicity of the Equations [146, 147].
190 | 5 Reversible and irreversible evolution
Another feature of the SHTC equations is that dynamics of dislocations is automatically contained in the theory. Indeed, irreversible terms in the equation for the distortion matrix may violate the compatibility condition that ∇×A = 0; see e.g., [148]. Without this condition the Lagrangian configuration cannot be recovered in a unique way. Curl of the distortion matrix is also called the Burgers tensor, which expresses dislocations. The evolution equation for the Burgers tensor is then the dynamics of dislocations. This way plasticity can be approached with the advantage that the deformation does not need to be split into the elastic and plastic parts. See [145] for more details on elasticity and plasticity of solids. The hyperbolic (or symmetric hyperbolic) evolution equations developed in [141] are referred to as the symmetric hyperbolic thermodynamically consistent (SHTC) equations. The equations are summarized in [43], where it was shown that they are fully compatible with GENERIC. This means, in particular, that the reversible part of SHTC equations is Hamiltonian and that the irreversible part can be regarded as gradient dynamics. SHTC equations are fully compatible with GENERIC.
5.9 Electromagnetic radiation Entropy and energy of a photon gas were addressed in Section 2.7.10. Let us now turn to evolution equations of a photon gas.
5.9.1 Kinetic theory On the Boltzmann level of description the photon gas is described by the distribution function f(r, p), which plays the role of a state variable. Kinematics of this state variable was already found in Section 3.6, where it was expressed by the Boltzmann Poisson bracket, from which the reversible part of the evolution equation is recovered as in Section 5.6.1. Dissipative evolution is to be generated by gradient dynamics (i.e., a dissipation potential) as well as in the case of the Boltzmann equation (collisions between particles) in Section 5.6.1. The resulting GENERIC evolution equation is thus ∂f(r, p) ∂ p = − (c f(r, p)) + [Ξ f ∗ (f, f ∗ )]f ∗ =Φ f , ∂t ∂r |p|
(5.143)
where the dissipation potential will contain contributions from collisions between photons and matter (scattering) as well as from absorption and radiation of photons by matter. Solutions to Equation (5.143) obey the second law of thermodynamics, ∂Φ/∂t ≤ 0, and consequently, f → f ̃ as t → ∞ with f ̃ being the equilibrium Planck distribution (2.142).
5.9 Electromagnetic radiation
|
191
5.9.2 Radiation hydrodynamics The level of fluid mechanics lies between the Boltzmann level of kinetic theory and the equilibrium level. The quantities playing the role of state variables in radiation hydrodynamics are two fields (u(r), s(r)), denoting the momentum density and the entropy density. We shall require that the total entropy S(ph) (f) given in (2.135) equals ∫ dr s(r) and total momentum is given by ∫ dr u(f) with u(f) being (2.138a). This implies that the fields (u(r), s(r)) are expressed in terms of the distribution function f(r, p) as follows: u(r) = ∫ dp pf(r, p) s(r) = −
kB ∫ dp [h3 f ln(h3 f) − (1 + h3 f) ln(1 + h3 f)] . h3
(5.144a) (5.144b)
This is the projection from the Boltzmann level to the hydrodynamic level in the energetic representation (entropy among the state variables). As well as in the passage from the Boltzmann level of description to the level of fluid mechanics in Section 3.7.1, or when deriving kinematics of heat transfer in Section 3.9, reversible evolution of fields u and s is generated by Poisson bracket {F, G} = ∫ dr u i (∂ j F u i G u j − ∂ j G u i F u j ) + ∫ dr s(∂ i F s G u i − ∂ i G s F u i ) .
(5.145)
The time reversible parts of the radiation hydrodynamic equations are then ∂u i = −ρ∂ i E ρ − u j ∂ i E u j − s∂ i E s − ∂ j (u i E u j ) ∂t ∂s = −∂ i (sE u i ) , ∂t
(5.146a) (5.146b)
where E = ∫ dr e(u, s; r). The dependence of the energy density field e(r) on the fields (u(r), s(r)) is obtained by the MaxEnt reduction from f(r, p) to the the fields (u(r), e(r)), where u(r) is given in (5.144) and e(r) in (2.138b). The dependence was derived in [16] explicitly (though with a slightly different entropy). With the explicit dependence of energy on the state variables, evolution equations (5.146) become ∂u i ) = −∂ j (pδ ij + τ ij ) ∂t rev ∂s (s) ( ) = −∂ i J i ∂t rev ∂e (e) ( ) = −∂ i J i , ∂t rev
(
(5.147a) (5.147b) (5.147c)
where ∂e 1 ∂e = e(y − 1) + uj ∂s ∂u j 3 ∂e 1−χ 3χ − 1 u i u j = e [( ] − p) δ ij + τ ij = u i ∂u j 2 2 u2 p = −e + s
(5.148a) (5.148b)
192 | 5 Reversible and irreversible evolution ∂e ∂u i
(s)
=s
(e)
= (e + p)
Ji Ji
(5.148c) ∂e ∂u i
(5.148d)
with the Eddington factor χ=
1 (5 − 2y) 3
and y = (4 −
3u2 ) c2 e2
(5.148e)
1/2
.
(5.148f)
Summing up, the radiation thermodynamics and hydrodynamics [149–153] can be derived by using the unifying framework of GENERIC. The first advantage is the clarity of the physics entering the derivation. The points of departure are two kinetic theory potentials, namely the entropy (2.135) and the energy (2.137), and the Hamiltonian nature of the photon dynamics noted in [149]. The GENERIC formalism then leads directly to the radiation thermodynamics and to the time reversible part of the radiation hydrodynamics. No additional physical assumptions are needed. As for the time irreversible part of the radiation hydrodynamics, GENERIC provides a framework for its investigation. The second advantage is an invitation to use fully all the methods that have been developed in GENERIC and to extend the radiation thermodynamics and hydrodynamics. As an example, we mention the possibility to replace free photons with photons moving in an environment with varying refraction index n. As noted in [149], this modification amounts to adding to the kinetic energy (2.137) a potential-like energy −n(r). With such change we can then follow directly all the steps in the derivation presented here for free photons. Another example of possible extensions is to follow the GENERIC form of the Grad reformulation of kinetic equations developed in Section 5.6.2 or to introduce nonlocal thermodynamic potentials and follow the analysis presented in Section 5.7. Both of these extensions can be pertinent in astrophysical applications.
5.10 Fiber suspensions Our objective in this section is to illustrate nonuniqueness of the mathematical formulation of the internal structure. In the illustration we also make two new observations about Hamiltonian mechanics (Chapter 3), namely the presence of constraints and the Hamiltonian form of rigid body mechanics. We consider a specific complex fluid, namely a dilute suspension of rigid fibers. Due to the dilution, we assume that the fiber-fiber interactions can be neglected and that the one-fiber distribution function plays the role of the state variable. Dynamics of fibers can be seen in two ways. First, we can regard a fiber as two particles of equal mass connected by a massless rigid rod.
5.10 Fiber suspensions | 193
This type of fiber is called in [108] a rigid dumbbell. The dynamics of the dilute suspension of rigid dumbbells is (as we show below) an adaptation of the dynamics discussed in Sections 5.7.1 and 5.7.2 to the constraint |R| = const., R being the vector between the ends of a dumbbell. The internal structure thus enters the mathematical formulation in the two (or more) particle kinetic theory as it does originally in [106, 107] and as it has also entered in the analysis presented in Section 5.6.3. There is however also a second way to regard a fiber. We can see it as a massive rigid rod experiencing the rigid body motion discussed in Section 3.3. The corresponding one-fiber kinetic theory, developed below in Section 5.10.2, represents another route to entering the internal structure. In order to keep focus on the internal structure, we limit ourselves to incompressible and isothermal suspensions with a homogeneous distribution of fibers.
5.10.1 Rigid dumbbell We begin with the state variables (u(r), c) ; tr c = 1 ,
(5.149)
where u(r) is the overall fluid momentum and the conformation tensor is c as introduced in Equations (5.101). The conformation tensor is assumed to be independent of r. The rigidity of the fiber is expressed in the constraint tr c = 1 .
(5.150)
Our first task is to investigate kinematics of (5.149). In the absence of the constraint, the Poisson bracket (5.103) leads directly to {A, B} = ∫ dr u i (∂ j (A u i )B u j − ∂ j (B u i )A u j ) + ∫ dr c ij (∂ k A c ij B u k − ∂ k B c ij A u k ) + ∫ dr [c kl (A c lm ∂ k B u m − B c lm ∂ k A u m ) + c km (A c lm ∂ k B u l − B c lm ∂ k A u l )] .
(5.151)
Now we proceed to accommodate the constraint and introduce a new conformation tensor def c ij b ij = , (5.152) tr c which indeed obeys the constraint, i.e., tr b = 1. The transformation (5.152) implies A c ij →
A b ij − b kl A b kl δ ij (δ ik δ jl − b kl δ ij ) ∂b kl A b kl = A b kl = . ∂c ij tr c tr c
(5.153)
194 | 5 Reversible and irreversible evolution
Inserting this relation into (5.151) leads to {A, B} = ∫ dr u i (∂ j (A u i )B u j − ∂ j (B u i )A u j ) + ∫ dr b ij (∂ k A b ij B u k − ∂ k B b ij A u k ) + ∫ dr [b kl (A b lm ∂ k B u m − B b lm ∂ k A u m ) + b km (A b lm ∂ k B u l − B b lm ∂ k A u l ) − 2b ij b kl (A b kl ∂ i B u j − B b kl ∂ i A u j ) ] ,
(5.154)
where some terms were neglected by setting tr c or tr b constant and by using the incompressibility constraint div v = 0. In the isothermal case, where Helmholtz free energy F can be taken as the generating potential (Section 4.4.2), bracket (5.154) implies evolution equations ∂u i ) = −∂ j (u i F u j ) − ∂ i p − ∂ j τ ij ∂t rev ∂c ij ) = −∂ k (c ij F u k ) + c ki ∂ k (F u j ) + c kj ∂ k (F u i ) ( ∂t rev (
− 2c ij c kl ∂ k (F u l ) ,
(5.155a)
(5.155b)
where we have replaced b with c (i.e., c in (5.155) and in the rest of this section obeys the constraint tr c = 1). Free energy and pressure F(u, c) = ∫ dr ϕ and p are defined as p = −ϕ + u i F u i + c ij F c ij
(5.156a)
τ ij = −2 (c im F c mj − c ij c kl F c kl ) .
(5.156b)
The equations governing the irreversible part of the evolution are ∂u i 1 = − [Ξ u∗i ]u∗ =Fu ) ∂t irrev T ∂c ij 1 = − [Ξ c ∗ij ]c∗ =Fc , ) ( ∂t irrev T (
(5.157a) (5.157b)
where Ξ is a dissipation potential depending on thermodynamic forces X (Section 4.4.3). If we let X depend on d∗ = c∗ − 1/3 tr c∗ I instead of on c∗ , then we obey the constraint tr c = 1. Indeed, Ξ c ∗ij = Ξ X kl (X kl )d∗rs (d∗rs )c ∗ij = Ξ X kl (δ ki δ lj −
1 δ kl δ ij ) , 3
(5.158)
which implies that tr (
dc ij dtr c 1 = − tr ([Ξ c ∗ij ]c∗ =Fc ) = 0 . )= dt dt T
(5.159)
5.10 Fiber suspensions | 195
Summing up, we have derived above the time evolution of the fiber suspension. In the derivation, we have regarded the fibers as rigid dumbbells and, for the sake of simplicity, we have limited the analysis to isothermal, incompressible suspensions in which the fibers are homogeneously distributed. The rigid dumbbell viewpoint of fibers allowed us to derive the dynamics by simply adapting the derivation of the time evolution in Section 5.7.1 to the constraint tr c = 1. EXERCISE: Other constraints Motivated by [154], let us consider det c = const. instead of (5.150). 1. Define a new state variable c ij b ij = . (det c)1/3 2. Calculate derivative of a functional: A cij → 3.
(δ ik δ jl − 13 b kl b −1 ij ) (det c)1/3
A bkl .
(5.160)
(5.161)
Derive the corresponding Poisson bracket by the same method as above: {A, B}c,det = {A, B}FM + ∫ dr [b ij (∂ k A bij B u k − ∂ k B bij A u k ) + b kl (A blm ∂ k B u m − B blm ∂ k A u m ) + b km (A blm ∂ k B u l − B blm ∂ k A u l ) −
4. 5.
2 b ij (A bij ∂ k B u k − B bij ∂ k A u k ) ] . 3
(5.162)
Write down the reversible evolution equations. In the dissipative time evolution X = c∗ is replaced with X = c∗ −
1 tr(c ⋅ c∗ )c−1 . 3
(5.163)
Write down also the irreversible evolution.
EXERCISE: Another constraint Follow the same route as in the preceding exercise, this time with constraint ((tr c)2 − tr(c ⋅ c)) = const.
5.10.2 Rigid rod Now we take another viewpoint of fibers. We shall regard them as rigid rods experiencing the rigid body motion. We begin with a single rigid rod. The state variables characterizing its states are (r, p, R, m) , (5.164) where (r, p) is the position vector and momentum of the center of mass of the rod, R is the unit vector along the rod and m is the angular momentum. The Poisson bracket expressing kinematics of (r, p, R, m) is [155] {A, B}(rod) = Ar ⋅ Bp − Ap ⋅ Br + m ⋅ (Am × Bm ) + R ⋅ (Am × BR − Bm × AR ) ,
(5.165)
196 | 5 Reversible and irreversible evolution where the symbol × stands for the cross product as in Section 3.3, where the Poisson bracket for rigid body rotation was derived. The time evolution equation corresponding to (5.165) is ṙ = E p
(5.166a)
ṗ = −Er Ṙ = − (R × Em )
(5.166b)
ṁ = − (m × Em ) − (R × ER ) ,
(5.166d)
(5.166c)
where E(r, p, R, m) is the energy. We now pass to distribution function f(r, p, R, m), for which the Poisson bracket (5.166a) becomes the Lie–Poisson bracket (3.59) for the distribution function dependent on coordinates (5.164), {A, B} = ∫ dr ∫ dp ∫ dR ∫ dm f {A f , B f }(rod) .
(5.167)
When introducing moments u i (r) = ∫ dp ∫ dR ∫ dm p i f(r, p, R, m)
(5.168a)
c ij (r) = ∫ dp ∫ dR ∫ dm R i R j f(r, p, R, m)
(5.168b)
μ i (r) = ∫ dp ∫ dR ∫ dm m i f(r, p, R, m) ,
(5.168c)
Poisson bracket (5.167) becomes {A, B} = ∫ dr [u i (∂ j (A u i )B u j − ∂ j (B u i )A u j ) + μ i (∂ j (A μ i )B u j − ∂ j (B μ i )A u j ) + μ j (A μ × B μ )j + c jk (∂ i (A c jk )B u i − ∂ i (B c jk )A u i ) + 2c il ϵ ijk (A μ j B c kl − B μ j A c kl ) ] .
(5.169)
The time evolution equations implied by (5.169) are ∂u i ) = −∂ j (u i Φ u j ) − ∂ i p ∂t rev ∂c ij ) = −∂ k (c ij Φ u k ) − (c × Φ μ )ij − (c × Φ μ ) ji ( ∂t rev ∂μ i ) = −∂ k (μ i Φ u k ) − (μ × Φ μ ) i − 2 (c × Φc )i , ( ∂t rev (
(5.170a) (5.170b) (5.170c)
where pressure is defined as p = −ϕ + u i Φ u i + c ij Φ c ij + μ i Φ μ i ,
(5.170d)
5.10 Fiber suspensions |
197
and the thermodynamic potential Φ = ∫ dr ϕ satisfies (c × Φc )i = ϵ ijk c jl Φ c kl
and
(c × Φ μ ) ij = ϵ ikl c jk Φ μ l .
(5.170e)
Note that the thermodynamic potential Φ can be interpreted as T −1 F, F being the Helmholtz free energy as in Section 4.4.2. More details can be found in [155]. Note that the addition of the extra variable, μ, which reflects motion of the rods rather than just the geometry of the suspension, reflected in the structural variable c as in the preceding section. This entails a different structure of evolution equations (compare (5.170) and (5.155)) where, e.g., setting μ to a constant (MaxEnt value) does not collapse to Equations (5.155). As momentum and angular momentum are both linked to movement of the suspended fibers, we expect the coupling between the overall flow and its internal structure (i.e., the suspended fibers) has to enter the rigid rod viewpoint of fibers in the irreversible part of the time evolution equations. With the dissipation potential Ξ = ∫ dr ((Φ μ +
1 1 1 ( χ ), κ) 2 Γ 12 λ
+ 12 χ) ) κ,
1 2 λ) ((Φ μ
Λ
(5.171)
where Γ, λ, and Λ; Λ > λ/4, are parameters, χ i = ϵ ijk ∂ k Φ u j is the vorticity, and κ i = (c × D)i = ϵ ijk c jl D kl , D ij = ∂ i Φ u j + ∂ j Φ u i , the irreversible time evolution equations become ∂u i ( ) = −Ξ u∗i = −∂ j τ ij ∂t irr (
∂c ij ) = −Ξ c ∗ij = 0 ∂t irr
(
1 ∂μ i ) = −Ξ μ∗i = − (2Φ μ i + χ i + λκ i ) , ∂t irr Γ
(5.172)
where the stress tensor is τ ij = −Ξ ∂ j Φ ui . In order to guarantee that the dissipation potential is convex, the parameters Γ, λ and Λ have to satisfy the relations Γ > 0 and Λ > λ2 /4. Moreover, since c is a positive definite tensor, 1/Γ can also be replaced by the matrix c/Γ. The dissipation potential (5.171) has been chosen on the basis of Jeffery’s investigation [156] of the motion of an ellipsoid immersed in a simple fluid subjected to an imposed flow. Before deriving (5.171), we reduce the time evolution equations (5.170a), (5.172) to equations in which the internal structure is represented only by the conformation tensor c. We achieve the reduction by assuming that the angular velocity Φ μ , as well as the angular momentum μ and its time derivative are small. With this assumption the third equations in (5.170a), (5.172) lead to 1 λ Φ μ i = − χ i − κ i − Γ(c × Φc )i . 2 2
(5.173)
198 | 5 Reversible and irreversible evolution This angular velocity, put into the time evolution equations for (u, c), yields ∂c ij 1 1 = (c jk ω ki + c ik ω kj ) + λ(c jk c kl D il + c ik c kl D jl − 2c jk c il D kl ) ∂t 2 2 + Γ(2c jk c il Φ c kl − c jk c kl Φ c il − c ik c kl Φ c jl )
(5.174)
and (a)
(s)
τ ij = τ ij + τ ij (a)
τ ij = c jk Φ c ik − c ik Φ c jk (s)
τ ij = λ(2c ik c jl Φ c kl − c ik c kl Φ c jl − c jk c kl Φ c il ) +
λ2 1 [ − (2Λ − ) (c ik c kl D lj + c jk c kl D li ) Γ 2 (4Λ − λ2 )c ij c kl D kl +
λ (c ik ω jk + c jk ω ik )] , 2
(5.175)
where ω ij = ∂ i Φ u j − ∂ j Φ u i and τ (s) (respectively τ (a) ) is the symmetric (respectively antisymmetric) part of the stress tensor τ. We recall that in simple fluids the conservation of the total angular momentum implies that the stress tensor is symmetric. But in complex fluids, where the internal structure may contribute to the total angular momentum (as is the case in the fiber suspensions), the stress tensor can also have an antisymmetric part. Now we turn to the derivation of the dissipation potential (5.171). As we have already mentioned, we base it on Jeffery’s investigation [156] of the motion of an ellipsoid immersed in a simple fluid subjected to an imposed flow. The Stokes-type analysis of the fluid-particle interaction leads to Jeffery’s equation Ṙ i = ω ij R j + λ(D ij R j − D jk R i R j R k ) ,
(5.176)
where λ = (r2 − 1)/(r2 + 1), r is the aspect ratio of the ellipsoid (i.e., the length divided by thickness). Let ψ(R) = ∫ dr ∫ dp ∫ dm f(r, R, p, m)
(5.177)
M(R) = ∫ dr ∫ dp ∫ dm mf(r, R, p, m) .
(5.178)
and
The equations governing the reversible time evolution of ψ(R) and M(R) are directly obtained from the Poisson bracket (5.167). We now look for its irreversible part. We require that after assuming that ΦM , M and ∂M/∂t are small, and expressing ΦM in terms of ψ(R) and Φ ψ(R) (similarly as in (5.173) with c playing the role of ψ(R) and μ playing the role of M(R)), the resulting reversible part of the equation governing the time evolution of ψ(R) becomes the Liouville equation ∂ψ(R) ∂ Ṙ i ψ , (5.179) =− ∂t ∂R i
5.10 Fiber suspensions | 199
with Ṙ i given by Jeffery’s equation (5.176). It can be directly verified [155] that this can be achieved with the dissipation potential (5.171) in which Φ μ is replaced by ΦM and κ with another κ that is defined by κ i = ϵ ijk R l R k D jl . The dissipation potential (5.171) and the dissipation potential with the replacement can be seen as two versions of the same dissipation potential, one on the level with state variables (c, μ) and the other on the level with state variables (ψ(R), M(R)). The time evolution equation (5.174) is a mesoscopic version of Jeffery’s equation (5.176).
5.10.3 Summary The investigation of fiber suspensions presented above illustrates the process of formulating a rheological model of complex fluids by following the multiscale GENERIC dynamics and thermodynamics. Different choices of state variables mathematically characterizing the internal structure can be made. Different choices then lead to different dynamics and consequently to different rheological models. Indeed, we see that the rigid dumbbell model represented by (5.155), (5.157) and (5.156) is different from the rigid rod model represented by (5.174) and (5.175). We expect that the rigid dumbbell model is more suitable for strong flows (i.e., flows that exert larger forces on fibers) and the rigid rod model in situations in which the free motion of the fibers is dominant. In the investigation of the rigid rod model we have also met the Hamiltonian dynamics rigid body rotation.
6 Multicomponent systems One of the simplest, if not the simplest and the most obvious way to extend the classical thermodynamics described in Sections 2.1–2.3 to a more detailed (more microscopic) level is to take a sharper view in which the system under investigation appears to be composed of not one but of two or more species. For instance, such a view of air reveals that it is a gas composed of several different gases (several different species). In the mathematical formulation this means that N ∈ ℝ denoting the number of moles becomes a vector N = (N1 , . . . , N p ) ∈ ℝp , where N i , i = 1, . . . , p denotes the number of moles of i-th component and p denotes the number of species (or components of the mixture). Historically, such extension led Gibbs to the complete formulation of the equilibrium thermodynamics that we presented in Chapter 2. Let us follow the same structure as in Chapters 2, 3, 4 and 5, where first projections and the hierarchy of entropies based on the MaxEnt principle were presented, followed by the hierarchy of Hamiltonian dynamics and irreversible evolution, finishing with GENERIC, where both reversible and irreversible evolutions are combined.
6.1 Entropy of binary mixtures 6.1.1 Binary Liouville entropy In the case of a single species the Liouville entropy is given by formula (2.112). The analogous formula for a binary mixture reads S(L2) = −
kB ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb f N a N b ln (h3(N a +N b ) f N a N b ) , N a !N b !
(6.1)
where N a and N b are numbers of molecules of the two species a and b. This is the Liouville entropy for the binary mixture described by the N a -and-N b particle distribution function f N a N b .
6.1.2 Binary Boltzmann entropy As in Section 2.7.7, where the Boltzmann entropy was derived from the Liouville entropy by projection to the one-particle distribution function, the binary Boltzmann entropy can be derived by maximization of the binary Liouville entropy (6.1). The projection from the binary Liouville distribution function to the two one-particle distri-
https://doi.org/10.1515/9783110350951-006
202 | 6 Multicomponent systems
bution functions of the binary mixture (one for each species) is given by formulas 1 ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb N a !N b !
f a (r, p) =
Na
f N a N b (1a , . . . , Na , 1b , . . . , Nb ) ∑ δ((r, p) − i) i=1a
1 = ∫ d2a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb N a !N b ! f N a N b ((r, p), 2a , . . . Na , 1b , . . . , Nb ) 1 + ∫ d1a ∫ d3a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb N a !N b ! f N a N b (1a , (r, p), 3a , . . . Na , 1b , . . . Nb ) .. . +
1 ∫ d1a ⋅ ⋅ ⋅ ∫ d(N − 1)a ∫ d1b ⋅ ⋅ ⋅ ∫ dNb N a !N b ! f N a N b (1a , . . . , (N − 1)a , (r, p), 1b , . . . , Nb )
(6.2a)
and 1 ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb N a !N b !
f b (r, p) =
Nb
f N a N b (1a , . . . , Na , 1b , . . . , Nb ) ∑ δ((r, p) − i) i=1b
1 ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d2b ⋅ ⋅ ⋅ ∫ dNb N a !N b !
=
f N a N b (1a , . . . Na , (r, p), 2b , . . . , Nb ) +
1 ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ∫ d3b ⋅ ⋅ ⋅ ∫ dNb N a !N b ! f N a N b (1a , . . . Na 1b , (r, p), 3b , . . . Nb )
.. . +
1 ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ d(N − 1)b N a !N b ! f N a N b (1b , . . . , Nb , 1b , . . . , (N − 1)b , (r, p)) ,
(6.2b)
which are analogous to formula (2.113). Projection (6.2) makes it possible to apply the principle of maximum entropy (MaxEnt) inferring the binary Boltzmann entropy inherited from the binary Liouville entropy (6.1) as in Section 2.7.7. Derivatives of the one-particle distribution functions with respect to the binary Liouville distribution function are N
a,b δf a,b (r, p) 1 ∑ δ((r, p) − i) , = δf N a N b (1a , . . . , Na , 1b , . . . , Nb ) N a !N b ! i=1 a,b
(6.3)
6.1 Entropy of binary mixtures
|
203
where the notation a,b is a shorthand notation for two separate equations for a and b. Entropy (6.1) can now be maximized with respect to the knowledge of the normalization of f N a N b , 1 = N a !N b ! ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb f N a N b
(6.4)
and the knowledge of the one-particle distribution functions (6.2). The MaxEnt equation 0=
δ 1 ( − S(L2) + ν∗ ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb f N a N b δf N a N b N a !N b ! + ∫ dr ∫ dp f a∗ (r, p)f a (f N a N b ) + ∫ dr ∫ dp f b∗ (r, p)f b (f N a N b ))
(6.5)
becomes ν∗ kB (ln (h3(N a +N b ) f N a N b ) + 1) + N a !N b ! N a !N b !
0=
+ ∫ dr ∫ dp f a∗ (r, p)
Na 1 ∑ δ((r, p) − i) N a !N b ! i=1 a
+ ∫ dr ∫ dp f b∗ (r, p)
Nb
1 ∑ δ((r, p) − i) N a !N b ! i=1 b
ν∗ kB (ln (h3(N a +N b ) f N a N b ) + 1) + = N a !N b ! N a !N b ! +
Na Nb 1 1 ∑ f a∗ (i) + ∑ f b∗ (i) , N a !N b ! i=1 N a !N b ! i=1 a
(6.6)
b
which has the solution f Ñ a N b (ν∗ , f a∗ , f b∗ ) =
1 h3(N a +N b ) ⋅ exp (−
exp (−1 −
ν∗ ) kB
1 Na ∗ 1 Nb ∗ ∑ f a (i)) ⋅ exp (− ∑ f (i)) , k B i=1 k B i=1 b a
(6.7)
b
which is the MaxEnt estimate of the binary Liouville distribution function based on the knowledge of the normalization and the conjugate one-particle distribution functions. A little more work is necessary to express f Ñ a N b in terms of f a and f b instead of the conjugate distributions. The normalization to unity (6.4) gives 1 ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb f Ñ a N b N a !N b ! 1 ν∗ = exp (−1 − ) 3(N +N ) kB N a !N b !h a b
1=
⋅ (∫ dr ∫ dp exp(−f a∗ (r, p)/k B )) ⋅ (∫ dr ∫ dp exp(−f b∗ (r, p)/k B ))
Na
Nb
,
(6.8)
204 | 6 Multicomponent systems which determines the value of ν∗ . Using this last relation and projection (6.2), the oneparticle distribution function of species a reads f a (r, p) =
1 exp(−f a∗ (r , p )/k B ))
(∫ dr ∫ dp ⋅
Na
1 exp(−f b∗ (r , p )/k B ))
(∫ dr ∫ dp
Nb
Na
⋅ ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∑ δ((r, p) − i) exp (− i=1a
1 Na ∗ ∑ f (j)) k B j=1 a a
⋅ (∫ dr ∫ dp exp(−f b∗ (r , p )/k B ))
Nb
∗
=
N a e−f a (r,p)/kB (∫ dr ∫ dp exp(−f a∗ (r , p )/k B )) (∫ dr ∫ dp exp(−f a∗ (r , p )/k B ))
N a −1
Na
∗
=
N a e−f a (r,p)/kB ∫ dr ∫ dp exp(−f a∗ (r , p )/k B )
.
(6.9a)
Similarly, the distribution function for species b is ∗
f b (r, p) =
N b e−f b (r,p)/kB ∫ dr ∫ dp exp(−f b∗ (r , p )/k B )
.
(6.9b)
From Equations (6.9) it is clear that the normalization of f a and f b is ∫ dr ∫ dp f a,b (r, p) = N a,b .
(6.10)
The Liouville distribution function (6.7) then becomes −N a
f Ñ a N b = N a !N b ! (∫ dr ∫ dp exp(−f a∗ (r, p)/k B )) ⋅ (∫ dr ∫ dp exp(−f b∗ (r, p)/k B )) ⋅ exp (−
1 Na ∗ 1 Nb ∗ ∑ f a (ia )) exp (− ∑ f (ib )) k B i =1 k B i =1 b a
Na
= N a !N b ! ∏ ia =1a Nb
⋅ ∏ ib =1b
−N b
a
b
b
N ∑iaa=1a f a∗ (ia )) exp(−f a∗ (r, p)/k B )
exp (− k1B ∫ dr ∫ dp
exp (− k1B ∑ibb=1b f b∗ (ib )) N
∫ dr ∫ dp exp(−f b∗ (r, p)/k B ) Na
= N a !N b ! ∏ ia =1a
f a (ia ) Nb f b (ib ) ∏ , N a i =1 N b b
b
(6.11)
6.1 Entropy of binary mixtures
| 205
which is the MaxEnt estimate of f N a N b based on the knowledge of the normalization and the knowledge of the one-particle distribution functions f a and f b . The Boltzmann entropy of the binary mixture is then equal to the Liouville entropy (6.1) valuated at the MaxEnt value (6.11), S(B2) =
−k B ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb N a !N b ! N a !N b ! N
N
Na a Nb b
Na
Nb
ia =1a
ib =1b
∏ f a (ia ) ⋅ ∏ f b (ib )
ln (h3(N a +N b ) =
−k B N
N
Na a Nb b
N a !N b !
Na
Nb
∏ f a (ia ) ⋅ ∏ f b (ib )) N N N a a N b b ia =1a ib =1b Na
Nb
ia =1a
ib =1b
∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb ∏ f a (ia ) ⋅ ∏ f b (ib )
⋅ [(N a + N b ) ln h3 + ln N a ! + ln N b ! − N a ln N a − N b ln N b Na
Nb
i=1a
i=1b
+ ∑ ln f a (i) + ∑ ln f b (i))] . Using the Stirling approximation log N! ≈ N ln N − N, the entropy becomes =
−k B N
N
Na a Nb b
Na
Nb
ia =1a
ib =1b
∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb ∏ f a (ia ) ⋅ ∏ f b (ib )
Na
Nb
ja =1a
jb =1b
⋅ ( ∑ ln f a (ja ) + ∑ ln f b (jb )) − =
kB N
N
N
Na a Nb b
−k B N
Na a
N
N a a N b b ((N a + N b )(ln h3 − 1)) Na
∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∑ f a (ja ) ln f a (ja ) ⋅ ∏ f a (ia ) ja =1a ia =j̸ a ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ N −1
=N a ∫ dr ∫ dp f a (r,p) ln f a (r,p)N a a
−k B N Nb b
Nb
∫ d1b ⋅ ⋅ ⋅ ∫ dNb ∑ f b (jb ) ln f b (jb ) ⋅ ∏ f b (ib ) jb =1b
ib =j̸ b
− k B ∫ dr ∫ dp f a (r, p)(ln h3 − 1) − k B ∫ dr ∫ dp f b (r, p)(ln h3 − 1) = −k B ∫ dr ∫ dp f a (ln(h3 f a ) − 1) − k B ∫ dr ∫ dp f b (ln(h3 f b ) − 1) .
(6.12)
206 | 6 Multicomponent systems
The binary Liouville entropy thus becomes the sum of two Boltzmann entropies (2.120) when evaluated at the MaxEnt value of f N a N b . Generalization to mixtures of any number of species is straightforward. In summary, the one-particle distribution functions of the two species f a and f b are defined by projection (6.2). Maximization of the binary Liouville entropy (6.1) subject to the knowledge of f a , f b and the normalization (6.4) turns the binary Liouville entropy into the binary Boltzmann entropy (6.12), which is the sum of two one-particle Boltzmann entropies.
6.1.3 Binary hydrodynamic entropy for ideal gases As in Section 2.7.8, we shall now restrict ourselves to binary mixtures of ideal gases, since that is perhaps the only case where all calculations can be done explicitly. The projection to the state variables of binary fluid mechanics in the case of ideal gases is ρ a (r) = ∫ dr ∫ dp m a f a (r , p )δ(r − r ) = ∫ dp m a f a (r, p )
(6.13a)
u a,i (r) = ∫ dr ∫ dp pi f a (r , p )δ(r − r ) = ∫ dp pi f a (r, p ) e a (r) = ∫ dr ∫ dp
(6.13b)
(p )2 (p )2 f a (r , p )δ(r − r ) = ∫ dp f a (r, p ) 2m a 2m a
ρ b (r) = ∫ dr ∫ dp m b f b (r , p )δ(r − r ) = ∫ dp m b f b (r, p )
(6.13d)
u b,i (r) = ∫ dr ∫ dp pi f b (r , p )δ(r − r ) = ∫ dp pi f b (r, p ) e b (r) = ∫ dr ∫ dp
(6.13c)
(6.13e)
(p )2 (p )2 f b (r , p )δ(r − r ) = ∫ dp f b (r, p ) . 2m b 2m b
(6.13f)
This projection is restricted to ideal gases due to the particularly simple expressions for energy densities e a and e b . The maximum value of the binary Boltzmann entropy (6.12) with respect to the known fields ρ a , ua , e a , ρ b , ub , e b is obtained by solving equation 0=
δ ( − S(B2) + ∫ dr ρ ∗a (r )ρ a (r ) + ∫ dr u∗a (r ) ⋅ ua (r ) + ∫ dr e∗a (r )e a (r ) δf a,b (r, p) + ∫ dr ρ ∗b (r )ρ b (r ) + ∫ dr u∗b (r ) ⋅ ub (r ) + ∫ dr e∗b (r )e b (r )) . (6.14)
Solution to this equation is m a,b ρ ∗a,b (r) + p a,b,i u ∗a,b,i (r) + 1 f a,b (r, p) = 3 exp (− kB h
p2 ∗ 2m a,b e a,b (r)
) ,
(6.15)
6.1 Entropy of binary mixtures
| 207
which is the same as Equation (2.123). Therefore, we can use the subsequent calculations from Section 2.7.8 to obtain the analogous results. In particular, the distribution functions in terms of state variables (6.13) are f a,b (ρ a,b , ua,b , e a,b )(r, p) 3
2 e∗a,b m a,b e∗a,b ua,b ρ a,b p 2 ( ) exp (− ( − ) ) = m a,b 2πm a,b k B 2k B ρ a,b m a,b
with e∗a,b =
3 kB 2
ρ a,b m a,b (e a,b −
u2a,b 2ρ a,b )
(6.16a)
,
(6.16b)
which is the analogy of Equations (2.125). Conjugate energies e∗a and e∗b are thus the inverse local temperatures of the two species, which are not equal to each other in general. The mixture thus has two temperatures, as for instance in the case of cold plasma [157]. Finally, plugging relations (6.16) into the binary Boltzmann entropy (6.12) leads to 3 2
u2
a ρa 5 m a 4πm a e a − 2ρ a S(Euler2) (ρ a,b , ua,b , e a,b ) = ∫ dr k B ( + ln ( ( ) )) ma 2 ρa 3h2 ρ a /m a
u2
3 2
b ρb 5 m b 4πm b e b − 2ρ b ( + ln ( ( ) )) , + ∫ dr k B mb 2 ρb 3h2 ρ b /m b
(6.17) which is the hydrodynamic entropy of a binary mixture of ideal gases on the level of description of binary fluid mechanics (6.13). Summing up, projection to binary hydrodynamics in the case of ideal gases (6.13) and the MaxEnt principle turn the binary Boltzmann distribution (2.120) into the sum of two hydrodynamic entropies (6.17).
6.1.4 Classical irreversible thermodynamic binary entropy of ideal gases Classical irreversible thermodynamics (CIT) is one of the most successful theories of nonequilibrium thermodynamics. In fact, it is the oldest form of continuum thermodynamics, developed by Meixner, Reik, Onsager, de Groot, Mazur and others [32, 89, 90, 158, 159] or [95]. From the point of view of different levels of description, CIT is the level with state variables ρ a,b = ρ a,b
(6.18a)
u = ua + ub
(6.18b)
e = ea + eb .
(6.18c)
208 | 6 Multicomponent systems
Maximization of the entropy (6.17) for binary mixtures of ideal gases while keeping state variables (6.18) proceeds as δ (−S(Euler2) + ∫ dr u∗ ⋅ (ua + ub ) + ∫ dr e∗ (e a + e b )) δua,b δ (−S(Euler2) + ∫ dr u∗ ⋅ (ua + ub ) + ∫ dr e∗ (e a + e b )) , 0= δe a,b 0=
(6.19a) (6.19b)
which leads to ũ a,b 3 kB + u∗ = 0 ũ 2a,b 2 m a,b ̃ e a,b − 2ρ a,b 3 ρ a,b 1 − kB + e∗ = 0 . ũ 2a,b 2 m a,b ̃ e a,b − 2ρ a,b
(6.20a)
(6.20b)
This is the MaxEnt estimate of ua,b and e a,b in terms of the conjugate momentum and conjugate energy density. From these two equations it follows that ũ a,b u =− ∗ , ρ a,b e
(6.21)
which means that the two species have the same velocities, ṽ a =
ũ a ũ b u∗ = = ṽ b = v = − ∗ . ρa ρb e
(6.22)
Total momentum is u = ũ a + ũ b = ρ a ṽ a + ρ b ṽ b = (ρ a + ρ b )v ,
(6.23)
and velocity v is thus the barycentric velocity of the whole mixture, u = (ρ a + ρ b )v. In particular, we have ua,b u = , (6.24) ρ a,b ρ a + ρ b which determines the MaxEnt values of ua and ub in terms of state variables (6.18). Total energy reads: u2 u2 e = ẽ a + ẽ b ± a ± b , (6.25) 2ρ a 2ρ b from which (by comparing with equation (6.20b)) it follows that e=
1 ρa ρb 1 3 ( + ) + (ρ a + ρ b )v2 . kB 2 e∗ m a m b 2
(6.26)
Equation (6.20b) then becomes ẽ a,b −
ũ 2a,b 2ρ a,b
ρ a,b /m a,b
=
u2 2(ρ a +ρ b ) ρa ρb ma + mb
e−
,
(6.27)
6.1 Entropy of binary mixtures
|
209
which determines the MaxEnt values of e a and e b in terms of state variables (6.18). Note that the mixture on the CIT level no longer has two temperatures. Plugging the MaxEnt values (6.24) and (6.27) into the binary hydrodynamic entropy (6.17) gives 3
2
S
(CIT)
2 u ρα 5 m α 4πm α e − 2(ρ a +ρ b ) (ρ a,b , u, e) = ∑ ∫ dr k B ( + ln ( ( ) )) , mα 2 ρα 3h2 ρ a /m a + ρ b /m b α∈{a,b}
(6.28) which is the CIT entropy of the binary mixture of ideal gases. It is also interesting to change the variables to n=
ρa ρb + ma mb
and
xa =
ρ a /m a , n
(6.29)
which represent total molar density and molar fraction of species a. In these variables entropy (6.28) becomes 2
S
(CIT)
u 1 4πm b e − 2(ρ a +ρ b ) 5 (n, x a , u, e) = ∫ dr k B n ( + ln ( ( ) 2 n n 3h2
3/2
))
− ∫ dr k B nx a ln x a − ∫ dr k B n(1 − x a ) ln(1 − x a ) + ∫ dr
ma 3 . k B nx a ln 2 mb
(6.30)
The first term on the right hand side is the hydrodynamic entropy (2.126) of the whole mixture seen as a one-component fluid. The second and third terms are the entropy of mixing. The last term expresses the differences between the particle masses of the two species (see also Section 94 of book [5]) and contributes to the species dependent reference part of partial entropies and chemical potentials (discussed also in Section 6.1.5). Entropy (6.30) can also be rewritten as x
S
(CIT)
1−x a
a 1 4πm a m b 5 (n, x a , u, e) = ∫ dr k B n ( + ln ( ( 2 n 3h2
e−
u2 2(ρ a +ρ b )
n
3/2
)
))
− ∫ dr k B x a n ln(x a ) − ∫ dr k B (1 − x a )n ln(1 − x a ) , (6.31) where the role of the two species is symmetric.
6.1.5 Binary mechanical equilibrium Momentum is often quickly damped, especially in chemical applications. The level of description with state variables ρ a,b and e is referred to as the level of mechanical
210 | 6 Multicomponent systems
equilibrium. See for instance [160], where many processes in chemical engineering are formulated on that level. Entropy (6.28) is maximized subject to the knowledge of ρ a,b and e simply by setting δS(CIT) 0= , (6.32) δu which means that u = 0. Substitution of this MaxEnt value of momentum into entropy (6.28) then leads to 3
S
(MechEq2)
2 ρα 5 e m α 4πm α (ρ a,b , e) = ∑ ∫ dr k B ( + ln ( ( ) )) , 2 ρ /m + ρ /m m 2 ρ 3h α α a a b b α∈{a,b}
(6.33) which is the entropy of a binary mixture of ideal gases on the level of mechanical equilibrium. In terms of the variables (6.29), entropy (6.33) becomes x
S
(MechEq2)
1−x a
a 1 4πm a m b 5 (n, x a , e) = ∫ dr k B n ( + ln ( ( 2 n 3h2
e ) n
3/2
))
− ∫ dr k B nx a ln x a − ∫ dr k B n(1 − x a ) ln(1 − x a ) .
(6.34)
Local chemical potential of species a (in units J/mol) is in general defined as −
δS(MechEq) μ ) , =( T δn a n b ,e
(6.35)
where n a = x a n and n b = (1 − x a )n. Using the explicit relation (6.33), the chemical potential becomes (2πm a )3/2 (k B T)5/2 μ a = −k B T ln ( ) +k B T ln p a , h3 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(6.36)
= μ ∘a (T)
where p a = n a k B T is the partial pressure of species a in the mixture. The first term on the right hand side is the reference chemical potential of the species dependent only on temperature while the second term depends on composition of the mixture. It should be borne in mind that equation (6.36) is valid only for mixtures of ideal gases. In the case of nonideal gases, the relation becomes μ a = μ∙ (T, p) + k B T ln a a ,
(6.37)
where a a is the activity of species a in the mixture. For mixtures of ideal gases the standard chemical potential of species μ ∙a is defined as μ∙a = μ∘a + k B T ln((n a + n b )k B T) , which means that a a = x a = n a /(n a + n b ) for the mixture of ideal gases.
(6.38)
6.1 Entropy of binary mixtures
|
211
6.1.6 Binary Sackur–Tetrode relation The end of the hierarchy of binary entropies is the equilibrium entropy of the mixture of ideal gases, which depends on state variables ρ a,b m a,b
(6.39a)
V = integration domain
(6.39b)
E = ∫ dr e(r) .
(6.39c)
N a,b = ∫ dr
Maximization of entropy (6.33) subject to the knowledge of variables N a,b , V and E then proceeds as follows: 0=
δ ρα (−S(MechEq2) + ∑ N α∗ ∫ dr + E∗ ∫ dr e) δρ a,b m α α∈{a,b}
(6.40a)
0=
δ ρα + E∗ ∫ dr e) . (−S(MechEq2) + ∑ N α∗ ∫ dr δe m α α∈{a,b}
(6.40b)
These equations give that ρ a,b = m a,b N a,b /V and e = E/V, i.e., that the MaxEnt values of fields ρ a,b and e are homogeneous in space. Entropy (6.33) evaluated at the MaxEnt values of ρ a,b and e becomes 3
S(ET2) (N a,b , V, E) =
∑ kB N α ( α∈{a,b}
2 E 5 V 4πm α ( ) )) . + ln ( 2 2 Nα 3h N a + N b
(6.41)
Introducing total number of particles N = N a + N b and molar fraction x a = N a /N, entropy (6.31) evaluated at the MaxEnt values becomes S(ET2) (N, x a , V, E) = k B N (
V 4πm b E 3/2 5 + ln ( ( ) )) 2 N 3h2 N
− k B Nx a ln x a − k B N(1 − x a ) ln(1 − x a ) ma 3 , + k B Nx a ln 2 mb
(6.42)
which is the equilibrium Sackur–Tetrode relation for a binary mixture of ideal gases. In the particular case of m a = m b = m, the entropy becomes S(ET2) (N, x a , E) = k B N (
5 V 4πm E 3/2 + ln ( ( 2 ) )) 2 N 3h N
− k B Nx a ln x a − k B N(1 − x a ) ln(1 − x a ) ,
(6.43)
which consists of the equilibrium entropy of ideal gas (2.128) (first line) and of the entropy of mixing (second line).
212 | 6 Multicomponent systems
Finally, maximization of entropy (6.42) with respect to x a leads to the MaxEnt value of mole fraction x a , x̃ a =
μ , 1+μ
with
μ=(
m a 3/2 ) . mb
(6.44)
The heavier molecules thus tend to have higher mole fractions if total number of particles remains constant. In particular, if m a = m b , the equilibrium composition is of course x a = 1/2. In summary, maximization of the CIT entropy subject to the knowledge of the overall composition, volume and energy leads to the binary Sackur–Tetrode relation (entropy of a mixture of ideal gases in equilibrium).
6.2 Hierarchy of Poisson brackets for binary mixtures Consider a mixture of particles of two species. Evolution of the classical particles (described by positions and momenta of the particles) can be of course described by Hamilton canonical equations (3.2). However, it is advantageous to describe the particles in terms of the binary Liouville distribution function f N a N b , since then we can work with quantities continuous in the phase space.
6.2.1 Liouville Poisson bracket for binary mixtures The Poisson bracket for the binary Liouville distribution function f N a N b is analogous to bracket (3.87), {F, G}(L2) = N a !N b ! ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb f N a N b {
(CM(N a N b )) δF δG , } , δf N a N b δf N a N b (6.45)
where {f, g}(CM(N a N b )) =
∑ {f, g}(CM(N α )) ,
(6.46)
α∈{a,b}
{∙, ∙}(CM(N α )) being the canonical Poisson bracket among particles of species α, Nα
{f, g}(CM(N α )) = ∑ ( iα =1α
∂f ∂g ∂g ∂f ⋅ − ⋅ ) ∂rα ∂pα ∂rα ∂pα
with
iα = (rα , pα ) .
(6.47)
Poisson bracket (6.45) is the binary Liouville Poisson bracket, expressing kinematics of the binary Liouville distribution function. The reversible evolution equation for the f N a N b distribution function is generated by bracket (6.45), and is analogous to the Liouville equation (3.89). However, due to the overwhelming complexity of the Liouville equation for large numbers of particles, we will focus on less detailed levels of description.
6.2 Hierarchy of Poisson brackets for binary mixtures
| 213
6.2.2 Boltzmann Poisson bracket for binary mixtures Consider a functional F(f a , f b ) dependent only on the one-particle distribution function f a and f b defined by projection (6.2). Derivative of the functional with respect to the binary Liouville distribution function is N
∑iαα=1α (δ(iα − (r α , pα ))) δF δF = ∑ ∫ dr α ∫ dpα δf N a N b α∈{a,b} δf α (r α , pα ) N a !N b ! =
1 N a !N b !
∑
Nα
∑
α∈{a,b} iα =1α
δF . δf α (iα )
(6.48)
Using this relation, Poisson bracket (6.45) with functionals F and G dependent only on f a and f b becomes {F, G}L2 =
1 ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb f N a N b N a !N b ! ⋅ ∑
∑
∑
Nα
Nβ
∑ ∑ {F f α (iα ) , G f β (jβ ) }(CM(N γ ))
α∈{a,b} β∈{a,b} γ∈{a,b} iα =1α jβ =1β
=
1 ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb f N a N b N a !N b ! Nγ
⋅ ∑
Nγ
∑ ∑ {F f γ (iγ ) , G f γ (jγ ) }(CM(N γ ))
γ∈{a,b} iγ =1γ jγ =1γ
1 = ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb f N a N b N a !N b ! Nγ
⋅ ∑
∑ {F f γ (iγ ) , G f γ (iγ ) }(CM(N γ ))
γ∈{a,b} iγ =1γ
=
1 ∫ d1a ⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb f N a N b N a !N b ! Nγ
⋅ ∑
∑ (
γ∈{a,b} iγ =1γ
∂F f γ (iγ ) ∂G f γ (iγ ) ⋅ −...) . ∂rγ ∂pγ
(6.49)
Note that several sums disappeared because the Poisson bracket of classical mechanics evaluated at functions dependent on different variables is zero. The goal is now to use the definitions (6.2a) and (6.2b). For instance, for γ = a and iγ = 1a the integration is carried out over all particles while the inner Poisson bracket (of classical mechanics) depends only on 1a . Similarly for iγ = 2a , the inner bracket depends only on 2b . In both cases the Liouville distribution is integrated over all but one particle and, when taking into account all the possible iγ , Definition (6.2a) is obtained. Expression (6.49)
214 | 6 Multicomponent systems
thus becomes {F, G}(L2) =
1 N a !N b !
Nγ
∑
∑ ∫ diγ (
γ∈{a,b} iγ =1γ
∂F f γ (iγ ) ∂G f γ (iγ ) ⋅ −...) ∂rγ ∂pγ
⋅ ∫ d1a ⋅ ⋅ ⋅ ∫ d(iγ − 1) ∫ d(iγ + 1)⋅ ⋅ ⋅ ∫ dNa ∫ d1b ⋅ ⋅ ⋅ ∫ dNb f N a N b =
∑ ∫ dr γ ∫ dpγ f γ (r γ , pγ ) ( γ∈{a,b}
∂F f γ (rγ ,pγ ) ∂G f γ (rγ ,pγ ) ⋅ − ...) ∂rγ ∂pγ
b
= ∑ {F, G}(Bγ ) ,
(6.50)
γ=a
where {∙, ∙}(Bγ ) is the Boltzmann Poisson bracket (3.99) with the one-particle distribution function f γ . In the case of more than two species in the mixture, the sum within this bracket would simply run over all the species, and the generalization to such mixtures is thus straightforward. In summary, the Poisson bracket expressing kinematics of the two distribution functions f a and f b is the sum of two Boltzmann Poisson brackets, one for each of the distribution functions, {F, G}B2 = {F, G}(Ba ) + {F, G}(Bb ) b
= ∑ ∫ dr ∫ dp f α (r, p) ( α=a
∂F f α ∂G f α ∂G f α ∂F f α ⋅ − ⋅ ) , ∂r ∂p ∂r ∂p
(6.51)
which is called the binary Boltzmann Poisson bracket. This Poisson bracket is implied by the binary Liouville Poisson bracket (6.45) and projection (6.2).
6.2.3 Binary fluid mechanics The distribution functions f a and f b still contain a lot of detail that is useful for instance when discussing collisions between the species, where the effective cross sections depend on the particular velocities of the particles. However, if the distribution functions are near their MaxEnt values (6.16), the mixture is effectively described by the state variables of binary fluid mechanics, i.e., densities, momentum densities and entropy densities of both species, ρ a (r) = ∫ dr ∫ dp f a (r , p )m a δ(r − r ) ,
(6.52a)
ua (r) = ∫ dr ∫ dp f a (r , p )p δ(r − r ) ,
(6.52b)
s a (r) = ∫ dr ∫ dp η a (f a (r , p ))δ(r − r ) ,
(6.52c)
ρ b (r) = ∫ dr ∫ dp f b (r , p )m b δ(r − r ) ,
(6.52d)
6.2 Hierarchy of Poisson brackets for binary mixtures
| 215
ub (r) = ∫ dr ∫ dp f b (r , p )p δ(r − r ) ,
(6.52e)
s b (r) = ∫ dr ∫ dp η a (f b (r , p ))δ(r − r ) ,
(6.52f)
where η a and η b are real-valued functions of one variable, for instance partial densities of entropy (6.12). Note that we do not need to assume the restriction to ideal gases like in Section 6.1.3. Consider a functional F that depends on f a and f b only through state variables (6.52). The derivative of the functional with respect to f a is then δF δF δF δF = ma +p⋅ + η (f a (r, p)) , δf a (r, p) δρ a (r) δua (r) δs a (r)
(6.53)
and it depends only on f a . Similarly, derivative F f b depends only on f b . Poisson bracket (6.51) does not provide coupling between the two different species, since each of the Boltzmann Poisson brackets for the individual species depends only on one of the two distribution functions, f a or f b . Therefore, the binary Boltzmann Poisson bracket (6.51) applied to the functionals dependent only on (6.52) consists of two parts, each of which is obtained in the same way as the Poisson bracket of fluid mechanics from the Boltzmann Poisson bracket in Section 3.7.1. Thence the Poisson bracket describing evolution of state variables (6.52) is {F, G}(FM2) = {F, G}(FM a ) + {F, G}(FM b ) =
∑ [ ∫ dr ρ α (∂ i F ρ α G u α,i − ∂ i G ρ α F u α,i ) α∈{a,b}
+ ∫ dr u α,i (∂ j F u α,i G u α,j − ∂ j G u α,i F u α,j ) + ∫ dr s α (∂ i F s α G u α,i − ∂ i G s α F u α,i ) ] ,
(6.54)
which is the Poisson bracket of binary fluid mechanics. The reversible evolution equations generated by bracket (6.54) and a yet unspecified energy functional E are ∂ρ α = −∂ i (ρ α E u α,i ) ∂t ∂u α,i = −ρ α ∂ i E ρ α − u α,j ∂ i E u α,j − s α ∂ i E s α − ∂ j (u α,i E u α,j ) ∂t ∂s α = −∂ i (s α E u α,i ) ∂t
(6.55a) (6.55b) (6.55c)
for α = a, b. Note that an analogous bracket with the sum running over all species works for mixtures of an arbitrary number of species. Energy of the binary mixture is typically E = ∫ dr (
u2 u2a + b + ε(ρ a , s a , ρ b , s b )) , 2ρ a 2ρ b
(6.56)
216 | 6 Multicomponent systems
which can be plugged into Equations (6.55) to obtain evolution equations in a closed form (of course after specification of the internal energy ε). In summary, kinematics of a binary mixture with state variables (6.52) is expressed by Poisson bracket (6.54), which is the sum of Poisson brackets of fluid mechanics, one for each species. This description of binary mixtures typically represents mixtures with different temperatures (as in cold plasma, where electrons have different temperature than ions [157]). Indeed, as there are two entropies, there are also two temperatures (derivatives of the entropies with respect to energy).
6.2.4 Poisson bracket for mixtures in CIT Although the presence of two entropies (and thus also two temperatures) in the mixture state variables (6.52) is useful, it is often observed or assumed that the mixture has only one temperature (and thus only one entropy) at a given point in space. Let us thus project state variables (6.52) to the state variables of classical irreversible thermodynamics (CIT), ρ a,b = ρ a,b
(6.57a)
u = ua + ub
(6.57b)
s = sa + sb .
(6.57c)
These CIT state variables consist of density of each species, total momentum and total entropy density (e.g., Equation (6.28), which contains also the entropy of mixing). Derivatives of a functional F dependent only on state variables (6.57) are (
δF δF ) =( ) δρ a ρ b ,ua ,ub ,s a ,s b δρ a ρ b ,u,s
(6.58a)
(
δF δF ) =( ) δρ b ρ a ,ua ,ub ,s a ,s b δρ b ρ a ,u,s
(6.58b)
(
δF δF δF ) =( ) =( ) δua ρ a ,ρ b ,ub ,s a ,s b δu ρ a ,ρ b ,s δub ρ a ,ρ b ,ua ,s a ,s b
(6.58c)
(
δF δF δF ) =( ) =( ) . δs a ρ a ,ρ b ,ua ,ub ,s b δs ρ a ,ρ b ,u δs b ρ a ,ρ b ,ua ,ub ,s a
(6.58d)
Substitution of these relations into bracket (6.54) leads to {F, G}(FM2) =
∑ [ ∫ dr ρ α (∂ i F ρ α G u i − ∂ i G ρ α F u i ) α∈{a,b}
+ ∫ dr u α,i (∂ j F u i G u j − ∂ j G u i F u j ) + ∫ dr s α (∂ i F s G u i − ∂ i G s F u i ) ] ,
(6.59)
6.2 Hierarchy of Poisson brackets for binary mixtures
| 217
which, using definitions (6.57), becomes the CIT Poisson bracket {F, G}(CIT) =
∑ [∫ dr ρ α (∂ i F ρ α G u i − ∂ i G ρ α F u i )] α∈{a,b}
+ ∫ dr u i (∂ j F u i G u j − ∂ j G u i F u j ) + ∫ dr s (∂ i F s G u i − ∂ i G s F u i ) .
(6.60)
This bracket expresses kinematics of state variables (6.57) and again an analogous bracket with the sum running over all species works for mixtures of an arbitrary number of species. The reversible evolution equations generated by bracket (6.60) and a yet unspecified energy functional E are ∂ρ α = −∂ i (ρ α E u i ) for α = a, b ∂t ∂u i = − ∑ ρ α ∂ i E ρ α − u j ∂ i E u j − s∂ i E s − ∂ j (u i E u j ) ∂t α∈{a,b} ∂s = −∂ i (sE u i ) . ∂t
(6.61a) (6.61b) (6.61c)
These evolution equations can be seen as passive advection of ρ a , ρ b and s by the total momentum u. In summary, Poisson bracket (6.60) expresses kinematics of the CIT state variables for binary mixtures ρ a , ρ b , u and s, and it can be derived by projection from the Poisson bracket for binary fluid mechanics (6.54).
6.2.5 Mixture as a one-component fluid The least detailed level of description where a Poisson bracket still plays a role (i.e., where some reversible evolution takes place) is the level where the mixture is seen as a fluid of one species. This is in fact the case of aerodynamics, where air is considered as a fluid disregarding variations of concentrations of its constituents. The projection from the CIT level to the one-component fluid is ρ = ρa + ρb
(6.62a)
u=u
(6.62b)
s=s.
(6.62c)
The only change in derivatives of the functionals is that Fρa = Fρ = Fρb ,
(6.63)
218 | 6 Multicomponent systems
and Poisson bracket (6.60) thus becomes bracket (3.110). Evolution equations generated by the bracket are then the Euler equations (3.112). In summary, when concentrations have relaxed to some constant values, the mixture can be regarded as a one-component fluid. The Poisson bracket expressing its kinematics is then the Poisson bracket of fluid mechanics, and the reversible evolution equations are the Euler equations for compressible fluids. Irreversible evolution can then be taken for instance as the Navier–Stokes dissipation as in Section 4.6.2.2.
6.3 Dissipation in mixtures A natural source of dissipation is collisions (or friction) between the components of the mixture. Let us now investigate friction in binary and ternary mixtures. Another source of dissipation in mixtures with multiple temperatures (or entropies) is the equilibration of the temperatures. Both sources of dissipation will be considered at once.
6.3.1 Dissipation in binary kinetic theory Consider a mixture described by several one-particle distribution functions, f a , f b , etc., as in Section 6.1.2 and Section 6.2.2. Reversible evolution equations for these state variables are generated by Poisson bracket (6.51) and consist of several Vlasov equations (3.103), one for each species. The irreversible evolution is generated by collisions between particles as in the case of the Boltzmann equation for a single-species fluid (Section 5.6.1), and collisions between different species can be described analogously. Since this generalization is straightforward and has been comprehensively carried out in [32], we do not include it in the present book. Instead of writing down the relatively easy to understand but cumbersome equations for collisions between two or more distribution functions, we focus on friction between species described on the level of binary hydrodynamics.
6.3.2 Dissipation in binary hydrodynamics Consider a binary mixture described by state variables (6.52), i.e., by two densities ρ a , ρ b , two momenta ua , ub , and two entropies s a and s b . Since the two species each have a different entropy, they also have different temperatures. There are two sources of dissipation: 1. Friction between the two species due to their relative motion. 2. Exchange of energy due to their relative temperatures.
6.3 Dissipation in mixtures
| 219
Let us first start with the friction between the two species. Since entropies s a and s b will play no role in the calculations, we will ignore them for the sake of brevity for a moment. Because the total momentum is conserved, it will be advantageous to transform the state variables ua and ub to a new couple of state variables u and w, where u is the total momentum (6.18b). What is a suitable choice for the other state variable w? We want the transformation to be linear and local so that the two sets of state variables are related by a constant 2 × 2 matrix. Energy of the mixture is (6.56), and friction is caused by relative velocity v a − vb = u†a − u†b between the two species, which is the thermodynamic force driving the friction. Recall that u†a is the conjugate momentum in the energetic representation, Eua . State variable w is to be the variable reflecting dissipation due to the thermodynamic force. Relaxation of w is driven by the corresponding conjugate variable, and in the energetic representation we require that Ew = va − vb . Derivative of energy with respect to w is Ew = (
δE ∂ua δE ∂ub ) ( +( ) ( ) ) δua ρ a ,ρ b ,ub ∂w ρ a ,ρ b ,u δub ρ a ,ua ,ρ b ∂w ρ a ,ρ b ,u
= va (
∂ua ∂ub + vb ( ) ) ∂w ρ a ,ρ b ,u ∂w ρ a ,ρ b ,u
and thus (
∂ua = 1 and ) ∂w ρ a ,ρ b ,u
(
(6.64)
∂ub = −1 ) ∂w ρ a ,ρ b ,u
(6.65a)
so that Ew = va − vb . To fully determine the transformation from (ua , ub ) to (u, w), we also need the derivatives of ua and ub with respect to u, (
∂ua =A ) ∂u ρ a ,ρ b ,w
and
(
∂ub =B, ) ∂u ρ a ,ρ b ,w
(6.65b)
where A and B are yet undetermined constants. The two sets of state variables are then related by a constant matrix (
ua A 1 u )=( )⋅( ) . ub B −1 w ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(6.66a)
def
=C
The inverse mapping is given by 1 1 1 ua u ( )⋅( ) , ( )= A + B B −A ub w ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(6.66b)
= C−1
from which follows the choice A = B = 1/2 due to the definition u = ua + ub . The matrices transforming (ua , ub ) to (u, w) and vice versa are thus 1/2 C=( 1/2
1 ) −1
and C−1 = (
1 1/2
1 ) , −1/2
(6.67)
220 | 6 Multicomponent systems
and the two sets of state variables are related through u = ua + ub 1 w = (ua − ub ) 2
(6.68a) (6.68b)
and u +w 2 u ub = − w . 2
ua =
(6.68c) (6.68d)
The conjugate variables are then related by δE δE ∂ua δE ∂ub ) ( ) ( ) =( ) +( ) δu w δua ub ∂u w δub ua ∂u w 1 = (u†a + u†b ) 2 δE ) = u†a − u†b , w† = ( δw u u† = (
(6.69a) (6.69b)
as required above. The linear transformation between (ua , ub ) and (u, w) has thus been found. Now we take into account also the entropies s a and s b and their equilibration. The dissipation is caused by the difference between the temperatures T α = E s α = s†α of the two species, and the thermodynamic force driving the two temperatures towards each other is thus s†a −s†b . Apart from the temperature difference, the total entropy s = s a +s b will also play an important role. The situation is thus analogous to the transformation between (ua , ub ) and (u, w), which is determined as Equations (6.66) or (6.68). The couple (s a , s b ) will thus be transformed to a new couple of state variables (s, σ) by 1/2 1 s sa ( )=( )⋅( ) sb 1/2 −1 σ ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(6.70)
=C
or s = sa + sb 1 σ = (s a − s b ) . 2
(6.71a) (6.71b)
The conjugate variables are then related by ∂s a ∂s b δE δE δE ) ( ) ( ) =( ) +( ) δs σ δs a s b ∂s σ δs b s a ∂s σ 1 = (s†a + s†b ) 2 δE σ † = ( ) = s†a − s†b δσ s s† = (
(6.72a) (6.72b)
6.3 Dissipation in mixtures
| 221
and 1 † σ 2 1 s†a = s† − σ † . 2 s†a = s† +
(6.72c) (6.72d)
The linear transformation between (s a , s b ) and (s, σ) has been thus found such that s is the total entropy and σ † is the force driving the temperatures towards each other. Assume that the dissipation potential that generates the irreversible evolution of state variables ρ a , ρ b , u, w, s, σ is quadratic in the conjugate (in the entropic representation) variables corresponding to the driving thermodynamic forces, 1 1 σ ∗ 2 (w∗ )2 + M ab (σ ) ] , Ξ(w∗ , σ ∗ ) = ∫ dr [ M w 2 ab 2
(6.73)
σ where M w ab and M ab are some yet undetermined positive coefficients related to friction and temperature equilibration. In the energetic representation (Section 4.5.1), it becomes 2 2 1 w† 1 σ σ† Ξ(w† , σ † ) = ∫ dr [ M w ( † ) + M ab ( †) ] . (6.74) ab 2 s 2 s
The irreversible evolution of the state variables are thus a particular realization of formulas (4.57), ∂ρ a ) =0 ∂t irr ∂ρ b ) =0 ( ∂t irr ∂u ( ) =0 ∂t irr (
Mw † ∂w w ) = − ab ∂t irr s† 1 ∂s † 2 σ † 2 ( ) = † 2 (M w ab (w ) + M ab (σ ) ) ∂t irr (s ) Mσ † ∂σ ( ) = − ab σ . ∂t irr s†
(
(6.75a) (6.75b) (6.75c) (6.75d) (6.75e) (6.75f)
The irreversible terms in the evolution equations of w and σ are proportional to the σ driving forces Ew and E σ respectively, through the positive coefficients M w ab and M ab . Irreversible evolution of total entropy density is determined by the positive entropy production (right hand side of the irreversible equation for s). Total energy is conserved automatically as proved in Section 4.5.1. Irreversible evolution equations (6.75) can be transformed to state variables (ρ a , ua , ρ b , ub , s, σ) by multiplying the respective evolution equations by relations
222 | 6 Multicomponent systems
(6.68) and (6.69b), ∂ρ a ) ∂t irr ∂ρ b ( ) ∂t irr ∂ua ) ( ∂t irr ∂ub ( ) ∂t irr ∂s ( ) ∂t irr ∂σ ( ) ∂t irr (
=0
(6.76a)
=0
(6.76b)
= −ζ ab (u†a − u†b )
(6.76c)
= −ζ ab (u†b − u†a )
(6.76d)
=
1 (ζ ab (u†a − u†b )2 + K ab (σ † )2 ) (s† )
= −K ab σ † ,
(6.76e) (6.76f)
† where the fraction M w ab /s was interpreted as the friction coefficient between the two σ species ζ ab , and fraction M ab /s† as the mutual heat exchange coefficient K ab . So far we have considered only the irreversible evolution of the binary mixture. The reversible evolution is given by Equations (6.55). The full GENERIC evolution equations will be the sum of the reversible and irreversible equations. But before summing the equations up, we have to transform them into the same variables. After the transformation to (ρ a , ua , ρ b , ub , s, σ) Equations (6.55) added with Equations (6.76) are (using Equations (6.69) and (6.72))
∂ρ a (6.77a) = −∂ i (ρ a u †a,i ) ∂t ∂ρ b (6.77b) = −∂ i (ρ b u †b,i ) ∂t ∂u a,i s σ† = −ρ a ∂ i ρ †a − u a,j ∂ i u †a,j − ( + σ) ∂ i (s† + ) − ∂ j (u a,i u †a,j ) ∂t 2 2 − ζ ab (u†a − u†b )
(6.77c) σ†
∂u b,i s = −ρ b ∂ i ρ †b − u b,j ∂ i u †b,j − ( − σ) ∂ i (s† − ) − ∂ j (u b,i u †b,j ) ∂t 2 2 − ζ ab (u†b − u†a ) 1 1 ∂s = − div (( s + σ) u†a + ( s − σ) u†b ) ∂t 2 2 1 † + † (ζ ab (u†a − ub )2 + K ab (σ † )2 ) s ∂σ 1 1 1 = − div (( s + σ) u†a − ( s − σ) u†b ) − K ab σ † . ∂t 2 2 2
(6.77d)
(6.77e) (6.77f)
After a specification of the energy functional E(ρ a , ua , ρ b , ub , s, σ), these equations become a closed set of GENERIC equations governing the binary mixture exhibiting mutual friction and temperature equilibration.
6.3 Dissipation in mixtures
|
223
6.3.3 Dissipation in ternary hydrodynamics A ternary mixture (mixture of three species) can be described by state variables (ρ a , ua , s a , ρ b , ub , s b , ρ c , uc , s c ), which is the level of ternary fluid mechanics. We can now proceed as in the preceding section to describe friction and temperature equilibration between the species. First we transform variables ua , ub and uc to u = ua + ub + uc
(6.78a)
and two new fields wb and wc that fulfill E wb = v a − v b
and
E wc = v a − v c .
(6.78b)
From these requirements it follows that ( and (
∂ua =1, ) ∂wb u,wc
∂ua ) =1, ∂wc u,wb
(
(
∂ub = −1 , ) ∂wb u,wc
∂ub ) =0, ∂wc u,wb
(
What remains is to determine the derivatives ∂ub ∂ua =A, ( =B, ) ) ( ∂u wb ,wc ∂u wb ,wc
(
∂uc =0 ) ∂wb u,wc
∂uc ) = −1 . ∂wc u,wb
(
∂uc =C. ) ∂u wb ,wc
(6.79a)
(6.79b)
(6.79c)
By analogous considerations as in the preceding section the unknown constants A, B and C are all set to 1/3 and the transformation between the state variables is given by 1/3 1 1 ua u = ⋅ (ub ) (1/3 −1 0 ) (wb ) . 1/3 0 −1 uc wc ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(6.80a)
def
=C
The inverse transformation is given by matrix C−1 , 1 1 1 ua u (wb ) = (1/3 −2/3 1/3 ) ⋅ (ub ) . 1/3 1/3 −2/3 wc uc ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
(6.80b)
= C−1
The conjugate variables are then related by u† = (
δE ∂ua δE ∂ub δE ∂uc ) ( +( ) ( +( ) ( ) ) ) δua ub ,uc ∂u wb ,wc δub ua ,uc ∂u wb ,wc δuc ua ,ub ∂u wb ,wc
1 † (u + u†b + u†c ) 3 a w†b = u†a − u†b
(6.81b)
w†c
(6.81c)
= =
u†a
−
u†c
.
(6.81a)
224 | 6 Multicomponent systems The linear transformation between (ua , ub , uc ) and (u, w2 , w3 ) meeting requirements (6.78) has thus been found. The transformation of entropies s a , s b and s c into s, σ b and σ c is analogous, sa s (s b ) = C ⋅ ( σ b ) , sc σc
(6.82a)
and the conjugate variables are then related by 1 † (s + s†b + s†c ) 3 a σ †b = s†a − s†b s† =
σ †c
=
s†a
−
(6.82b) (6.82c)
s†c
(6.82d)
or 1 † σ + 3 b 2 s†b = s† − σ †b + 3 1 s†c = s† + σ †b − 3 s†a = s† +
1 † σ 3 c 1 † σ 3 c 2 † σ . 3 c
(6.82e) (6.82f) (6.82g)
The linear transformation between (s a , s b , s c ) and (s, σ b , σ c ) is thus the same as between the momenta. As in Section 6.3.2 we assume that the dissipation potential that generates the irreversible evolution of state variables is quadratic in the conjugate variables in the entropic representation, 1 1 1 Ξ(w∗b , w∗c , σ ∗b , σ ∗c ) = ∫ dr [ M w (w∗ )2 + M w (w∗ − w∗c )2 + M w (w∗ )2 2 bb b 2 bc b 2 cc c +
1 σ ∗2 1 σ ∗ 1 σ ∗2 (σ c ) ] , (6.83) M (σ ) + M bc (σ b − σ ∗c )2 + M cc 2 bb b 2 2
w σ σ w σ where M w bb , M bc , M cc , M bb , M bc , M cc are some yet undetermined coefficients related to friction and temperature equilibration. The matrices
(
w Mw bb + M bc −M w bc
−M w bc w ) ≥ 0 and Mw cc + M bc
(
σ σ + M bc M bb σ −M bc
σ −M bc σ + Mσ ) ≥ 0 M cc bc
are positive semidefinite in order to make the dissipation potential convex.
(6.84)
6.3 Dissipation in mixtures
|
225
The irreversible evolution of the state variables in the energetic representation are thus a particular realization of formulas (4.57), ∂ρ a ) ∂t irr ∂ρ b ) ( ∂t irr ∂ρ c ) ( ∂t irr ∂u ( ) ∂t irr
(
=0
(6.85a)
=0
(6.85b)
=0
(6.85c)
=0
(6.85d) w
w
M M ∂wb w†b − †bc (w†b − w†c ) ) = − bb † ∂t irr s s Mw Mw ∂wc ( ) = − †bc (w†c − w†b ) − †cc w†c ∂t irr s s
(
(
(6.85e) (6.85f)
1 ∂s † 2 † w † 2 w † 2 [M w ) = bb (wb ) + M bc (wb − wc ) + M cc (wc ) ∂t irr (s† )2 σ σ σ M bb (σ †b )2 + M bc (σ †b − σ †c )2 + M cc (σ †c )2 ] σ
(6.85g)
σ
M M ∂σ b σ †b − †bc (σ †b − σ †c ) ) = − bb † ∂t irr s s σ M bc ∂σ c Mσ ( ) = − † (σ †c − σ †b ) − †cc σ †c . ∂t irr s s
(
(6.85h) (6.85i)
The irreversible terms in evolution equations of wb,c and σ b,c are proportional to the driving forces Ewb,c and E σ b,c respectively. Irreversible evolution of total entropy density is determined by the positive entropy production (right hand side of the irreversible equation for s). Total energy is conserved automatically as proved in Section 4.5.1. Irreversible evolution equations (6.75) can be transformed to state variables (ρ a , ua , ρ b , ub , ρ c , uc , s, σ b , σ c ) by multiplying the respective evolution equations by relations (6.81) and (6.82), ∂ρ a ) ∂t irr ∂ρ b ) ( ∂t irr ∂ρ c ) ( ∂t irr ∂ua ) ( ∂t irr (
=0
(6.86a)
=0
(6.86b)
=0
(6.86c)
= −ζ ab (u†a − u†b ) − ζ ac (u†a − u†c )
(6.86d)
226 | 6 Multicomponent systems ∂ub ) = −ζ ab (u†b − u†a ) − ζ bc (u†b − u†c ) ∂t irr ∂uc ( ) = −ζ ac (u†c − u†a ) − ζ bc (u†c − u†b ) ∂t irr
(
(
(6.86e) (6.86f)
1 ∂s ) = [ζ ab (u†a − u†b )2 + ζ bc (u†b − u†c )2 + ζ ac (u†a − u†c )2 ∂t irr s† K bb (σ †b )2 + K bc (σ †b − σ †c )2 + K cc (σ †c )2 ]
∂σ b ) = −K ab σ †b − K bc s† (σ †b − σ †c ) ∂t irr ∂σ c ) = −K bc (σ †c − σ †b ) − K ac σ †c , ( ∂t irr
(
(6.86g) (6.86h) (6.86i)
where coefficients of matrices (6.84) were identified as 1 Mw ( bb s† M w bc and
σ 1 M bb ( σ † s M bc
Mw bc ) = ( ζ ab Mw ζ bc cc σ M bc K ab σ ) = (K M cc bc
ζ bc ) ζ ac
(6.87a)
K bc ) . K ac
(6.87b)
Equations (6.86) represent the irreversible evolution caused by friction and temperature equilibration in ternary mixtures. So far we have considered only the irreversible evolution of the ternary mixture. The reversible evolution is given by Equations (6.55) with the sum running over α = 1, 2, 3. The full GENERIC evolution equations will be the sum of the reversible and irreversible equations. But before summing the equations up, we have to transform them into the same variables. After the transformation to (ρ a , ua , ρ b , ub , ρ c , uc , s, σ b , σ c ) Equations (6.55) (extended to the ternary mixture) added with Equations (6.86) are (using Equations (6.80) and (6.82)) ∂ρ a ∂t ∂ρ b ∂t ∂ρ c ∂t ∂u a,i ∂t
= −∂ i (ρ a u †a,i )
(6.88a)
= −∂ i (ρ b u †b,i )
(6.88b)
= −∂ i (ρ c u †c,i )
(6.88c)
= −ρ a ∂ i ρ †a − u a,j ∂ i u †a,j − ∂ j (u a,i u †a,j ) 1 1 s + σ b + σ c ) ∂ i (s† + σ †b + σ †c ) 3 3 3 − ζ ab (u†a − u†b )i − ζ ac (u†a − u†c )i −(
(6.88d)
6.3 Dissipation in mixtures
|
227
∂u b,i = −ρ b ∂ i ρ †b − u b,j ∂ i u †b,j − ∂ j (u b,i u †b,j ) ∂t 2 1 s − ( − σ b ) ∂ i (s† − σ †b + σ †c ) 3 3 3 − ζ ab (u†b − u†a )i − ζ bc (u†b − u†c )i
(6.88e)
∂u c,i = −ρ c ∂ i ρ †c − u c,j ∂ i u †c,j − ∂ j (u c,i u †c,j ) ∂t 1 2 s − ( − σ c ) ∂ i (s† + σ †b − σ †c ) 3 3 3 − ζ ac (u†c − u†a )i − ζ bc (u†c − u†b )i
(6.88f)
∂s s s s = − div (( + σ b + σ c ) u†a + ( − σ b ) u†b + ( − σ c ) u†c ) ∂t 3 3 3 1 + † [ζ ab (u†a − u†b )2 + ζ bc (u†b − u†c )2 + ζ ac (u†a − u†c )2 s K bb (σ †b )2 + K bc (σ †b − σ †c )2 + K cc (σ †c )2 ]
(6.88g)
∂σ b 1 1 = − div (( s + σ b + σ c ) u†a ) ∂t 3 3 1 1 1 − div (−2 ( s − σ b ) u†b + ( s − σ c ) u†c ) 3 3 3 − K ab σ †b − K bc s† (σ †b − σ †c )
(6.88h)
∂σ c 1 1 = − div (( s + σ b + σ c ) u†a ) ∂t 3 3 1 1 1 − div (( s − σ b ) u†b − 2 ( s − σ c ) u†c ) 3 3 3 − K bc (σ †c − σ †b ) − K ac σ †c .
(6.88i)
These are the GENERIC evolution equations governing a ternary mixture exhibiting mutual friction and temperature equilibrization.
6.3.4 Dissipation in isothermal mechanical equilibrium The level of isothermal mechanical equilibrium is characterized by state variables ρ a , ρ b and ρ c for a ternary mixture; see Section 4.4.2. Therefore, only evolution equations for the densities are present on this level. By the dynamic MaxEnt reduction from Equations (6.88a)–(6.88f), noting that the MaxEnt values of momentum densities are zero and that the isothermality implies
228 | 6 Multicomponent systems s† = σ †b = σ †c = 0, we obtain ∂ρ a ∂t ∂ρ b ∂t ∂ρ c ∂t ρ a ∇μ a
= − div (ρ a u†a )
(6.89a)
= − div (ρ b u†b )
(6.89b)
= − div (ρ c u†c )
(6.89c)
= −ζ ab (u†a − u†b ) − ζ ac (u†a − u†c )
(6.89d)
ρ b ∇μ b = ρ c ∇μ c =
−ζ ab (u†b − u†a ) − ζ bc (u†b − u†c ) −ζ ac (u†c − u†a ) − ζ bc (u†c − u†b ) ,
(6.89e) (6.89f)
where chemical potentials (in [J/kg]) were identified with the local equilibrium relations δF μα = ( ) ∀α = 1, 2, 3 , (6.90) δρ α T,ρ β=α̸ F being the Helmholtz free energy as in Section 4.4.2. Equations (6.89) are the Maxwell– Stefan diffusion equations, which can be thus seen as a consequence of friction between the species of the mixture.
6.3.5 Chemical reactions In this section we concentrate on the dissipative mechanism involved in chemical reactions, i.e., in interactions (collisions) of molecules in which rearrangements of the composition described by N = (N1 , . . . , N p ) take place. We shall limit ourselves to isothermal systems so that the only state variable is the vector n = (n1 , . . . , n p ), where n i = N i /V, i = 1, . . . , p, and V is a fixed volume. With no velocity type state variable, the time evolution has to be only dissipative and time irreversible. Equations governing such time evolution have been introduced by Cato Maxmilian Guldberg and Peter Waage in [161] and are called mass action laws. An extension of this purely dissipative time evolution to a complete GENERIC equation will be discussed later in this section. 6.3.5.1 General formulation We begin by writing the classical mass action law. We use the standard notation of chemical kinetics. We consider p species 𝔸 1 , . . . , 𝔸 p undergoing q chemical reactions (we assume p > q) (j)
(j)
(j)
(j)
α 1 𝔸 1 + ⋅ ⋅ ⋅ + α p 𝔸 p β 1 𝔸 1 + ⋅ ⋅ ⋅ + β p 𝔸 p ,
(6.91)
where j = 1, 2, . . . , q enumerates the reaction steps. The quantities defined by (j)
(j)
(j)
γ i = β i − α i ; j = 1, 2, . . . , q ; i = 1, 2, . . . , p
(6.92)
6.3 Dissipation in mixtures
| 229
are called stoichiometric coefficients. The Guldberg–Waage mass action law dynamics (GW dynamics) is governed by q
dn i (j) = ∑ γ i J (j) ; i = 1, 2, . . . , p , dt j=1
(6.93)
where J = (J (1) , . . . , J (q) )T are reaction fluxes. To simplify the notation, we introduce the stoichiometric matrix (1)
γ1 (1) γ2 (. . . . γ=( (... ... (1) γ ( p
... ... ... ... ... ...
(q)
γ1 (q) γ2 . . .) ) . . .) ... (q) γp )
(6.94)
and write (6.93) in the form dn = γ⋅J. (6.95) dt A specification of the reaction fluxes J requires a constitutive relation. According to the mass action law (j) (j) (j) (j) → ← β(j) β(j) α β α α J (j) = k (j) n11 n22 . . .n pp − k (j) n11 n22 . . .n pp ; j = 1, . . . , q ,
(6.96)
← → where k (j) , k (j) are the rate coefficients of the backward and the forward j-th reaction step respectively. The Equation (6.93) together with the constitutive relation (6.96) is the equation governing the time evolution of n in chemical kinetics. We proceed to investigate their solutions. In particular we ask the following questions: Do solutions to this equation approach equilibrium? If they do, what is the fundamental thermodynamic relation implied by (6.93) and (6.96)? We answer these questions by casting (6.93) and (6.96) into the form of Equation (4.21) with x = n. We have shown in Chapter 4 that Equation (4.21) does describe the approach to the equilibrium state corresponding to the thermodynamic potential Φ(x) that determines the implied equilibrium fundamental thermodynamic relation. As a first step, we write the constitutive relation (6.96) in the form J=
∂Ξ(n, X) , ∂X
(6.97)
where X = (X (1) , . . . , X (q) )T are reaction forces (called chemical affinities; Section 4.4.3), given by X(n∗ ) = −γ T n∗ , (6.98) and the vector of chemical potentials n∗ = (n∗1 , . . . , n∗p )T by n∗ = Φ(n)n .
(6.99)
230 | 6 Multicomponent systems
It remains now to identify the dissipation potential Ξ and the thermodynamic potential Φ (recall that we consider only isothermal systems) such that (4.21) is equivalent to the mass action law (6.93) and (6.96). We initiate this search by choosing Ξ and Φ and verify the resulting constitutive relations. Using chemical potentials (6.37) for ideal gases, this process leads us to q
(l)
(l)
Ξ(n, X) = ∑ W (l) (n) (e 2 X + e− 2 X − 2) 1
1
(6.100)
l=1
and
p
Φ(n) = ∑ (n j ln n j + Q j n j ) ,
(6.101)
j=1
where Q1 , . . . , Q p are parameters expressing some reference values of the chemical potentials. A direct verification shows that: 1. the dissipation potential (6.100) satisfies all the properties listed in Section 4.4.1, 2. near chemical equilibrium states (i.e., near the state at which the chemical affinities equal zero, X = 0), the dissipation potential becomes the quadratic potential q Ξ(n, X) ∼ 1/2 ∑l=1 X (l) W (l) (n)X (l) , and 3. ṅ = −[Ξn∗ ]n∗ =Φ n (6.102) with (6.100) and (6.101) becomes the mass action law (6.93), (6.96) with 1
(j) (j) (j) (j) (j) (j) (j) (j) (j) 2 1 ← 1 β α β β α α ((Q +1)γ 1 +(Q2 +1)γ 2 +⋅⋅⋅+(Q p +1)γ p ) × (n11 n22 . . .n pp n11 n22 . . .n pp ) k (j) = W (j) e 2 1 2 (6.103) and ← (j) (j) (j) k (j) ((Q 1 +1)γ 1 +(Q2 +1)γ 2 +⋅⋅⋅+(Q p +1)γ p ) (6.104) → (j) = e k for j = 1, 2, . . . , q.
We have thus succeeded in relating the mass action law time evolution to thermodynamics. The formulation (6.102) of the mass action law appeared first in [130]. Its predecessors can be found in [162–166] or [167]. Let us end this section by a simple illustration and two observations. 6.3.5.2 Illustration We illustrate the reformulation (6.102) of the mass action law on the following simple example. We take a specific chemical reaction: 2H2 + O2 2H2 O, representing oxidation of hydrogen. In this example we have three components (i.e., p = 3) undergoing one chemical reaction (i.e., q = 1). The subscripts 1, 2, and 3 denote H2 , O2 , and H2 O
6.3 Dissipation in mixtures
| 231
respectively; n = (n1 , n2 , n3 )T . The stoichiometric matrix γ takes the form −2 γ = (−1) . 2
(6.105)
The mass action equation (6.95) becomes dn1 = −2J ; dt
dn2 = −J ; dt
dn3 = 2J dt
(6.106)
with the constitutive relation ← → J = k n21 n2 − k n23 .
(6.107)
In the formulation (6.102), the dissipation potential Ξ is given by Ξ(n, X(n)) = W(n) (e 2 X(n) + e− 2 X(n) − 2) , 1
1
(6.108)
→ 1/2 where W(n) = W0 n1 n2 n3 , W0 > 0 is a parameter related to the rate coefficients k ← and k introduced in the mass action constitutive relation by → 1 k = W0 2 ← 1 k = W0 e(−2(Q1 +1)−(Q2 +1)+2(Q3 +1)) . 2
(6.109a) (6.109b)
The chemical affinity in this example is X(n) = 2n∗1 + n∗2 − 2n∗3 ,
(6.110)
where n∗i = Φ n i , i = 1, 2, 3 and Φ(n1 , n2 , n3 ) = n1 ln n1 + n2 ln n2 + n3 ln n3 + Q1 n1 + Q2 n2 + Q3 n3 .
(6.111)
Finally, the reaction flux becomes J(n) =
1 1 ∂Ξ 1 = W(n) (e 2 X(n) − e− 2 X(n) ) . ∂X 2
(6.112)
6.3.5.3 Observations 1. The thermodynamic potential (6.101) is the free energy implying the ideal gas fundamental thermodynamic relation. The mass action law is thus limited to systems that, from the thermodynamical point of view, behave as ideal gases. One of the advantages of the formulation (6.102) is that by simply changing the thermodynamic potential in (6.102) we are adapting the mass action law to more complex systems, from the thermodynamical point of view. See for instance [168] for application of an analogous framework to electrochemical reactions (Butler–Volmer equation).
232 | 6 Multicomponent systems
2.
Detailed experimental observations of chemical kinetics reveal in many chemical reactions the presence of additional intermediate components that appear in the detailed observations of the reaction process but do not appear in the overall input-output balance [165]. The hierarchy of the mass action law dynamics that takes into account a varied number of components is an example of the multiscale description of chemical kinetics.
6.3.5.4 Extended chemical kinetics Another way to introduce a level on which more details are seen in chemical reactions is motivated by the following question: Can we extend the irreversible and purely dissipative time evolution governed by the mass action law to a GENERIC time evolution that involves also a time reversible Hamiltonian part? From the physical point of view, the extension in question is the inclusion of ‘chemical inertia’ into the mass action law. Recall that in mechanics (Section 3.1.2), we can see Hamilton’s equations as equations extending mechanics without inertia to mechanics with inertia. Indeed, the governing equations of the mechanics without (mechanical) inertia are q̇ = v(q), where q is the position coordinate and v(q) is the velocity expressed in terms of the position coordinate. The governing equations of the mechanics with inertia are Hamilton’s equations with friction: q̇ = p∗ , ṗ = −q∗ − λp∗ , (6.113) where p is the momentum, λ > 0 is a friction parameter, and q∗ = E q ; p∗ = E p , E(q, p) being the energy. If we assume that the inertia is weak, i.e., that −q∗ − λp∗ ≈ 0, then Hamilton’s equations with friction reduce to q̇ = v(q) with v(q) = −1/λq∗ . See Section 5.3.1 for more details of the model. In order to make a similar extension of the mass action law, we introduce new state variables x = (n, z) = (n1 , . . . , n p , z(1) , . . . , z(q) ) . (6.114) The variables (n1 , . . . , n p ) are the same as those in the mass action law while (z(1) , . . . , z(q) ) are velocity type variables (i.e., odd with respect to time reversal transformation) that, as we shall see below, are closely related to the reaction fluxes J. We shall assume that the Poisson bracket in which the kinematics of (6.114) is expressed is given by Bn 0 γ {A, B} = (An , Az ) ( T )( ) −γ 0 B z , ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ def
= L (Chem)
(6.115)
6.4 Mixtures in electromagnetic fields | 233
where the matrix γ is the stoichiometric matrix given in (6.94). The GENERIC time evolution equation then becomes n∗ ṅ ( ) = L(Chem) [( ∗ )] z ż = [(
γz∗
− [( n∗ =Φ n ;z∗ =Φ z
(ext) )] n∗ =Φ n ;z∗ =Φ z
−γ T n∗ − Ξz∗
0 (ext) )] Ξz∗ z∗ =Φ
,
z
(6.116)
where Ξ(ext) is a dissipation potential that we relate below to the dissipation potential Ξ given in (6.100). To establish the relation, we assume that the chemical inertia is weak, e.g., the (ext) inertia type state variables have nearly relaxed, and thus −Ξz∗ − γ T n∗ ∼ 0. In order to have the extended evolution compatible with the standard mass action law, i.e., to have Equation (6.116) reducing to the mass action law, the following equations have to be satisfied: −Ξn∗ = γz̃∗ (ext)
−Ξz∗ where
z̃∗
− γ T n∗ = 0 ,
(6.117)
is a solution to Φz = 0. Consequently, we obtain ∗(ext)
Ξn∗ = [Ξ(z∗ )† ]
(z∗ )† =−κ T n∗
,
(6.118)
∗(ext)
where Ξ(z∗ )† is the Legendre transformation of Ξ(ext) , and the superscript † denotes the conjugate with respect to Ξ(ext) (recall that the superscript ∗ denotes the conjugate with respect to the potential Φ). With Ξ given in (6.100), this relation yields s
Ξ(ext) (z∗ , n∗ ) = 2 ∑ W (i) (n) [√1 + (ẑ(i)∗ )2 + ̂z∗i ln (ẑ(i)∗ + √1 + (ẑ(i)∗ )2 )] + C(n) , i=1
(6.119) ẑ(i)∗
z(i)∗/(W (i) (n)),
= and C(n) is an undetermined function of n. where Summing up, we have shown that (6.116) with the extended dissipation potential Ξ(ext) given in (6.119) represents an inertia extension of the mass action law. This extension was first introduced in [166] and it was used to couple chemical kinetics with mechanics in [169].
6.4 Mixtures in electromagnetic fields Let us now consider mixtures of charged species subject to an electromagnetic field. For simplicity we will focus on binary mixtures, but extensions to any number of species is straightforward. The reversible evolution will be again generated by a hierarchy of Poisson brackets (summarized in [38]) while the irreversible evolution will be generated by gradient dynamics transformed into the energetic representation.
234 | 6 Multicomponent systems
6.4.1 Binary kinetic electrodynamics The level of description where a binary mixture is represented by two one-particle distribution functions f a and f b and the state variables of electromagnetic field, D and B, is called the binary kinetic electrodynamics. Poisson bracket (3.224) is extended to binary mixtures as {F, G}(KED2) = {F, G}(B2) + {F, G}(EM) + ∑ ∫ dr ∫ dp q α α∈{a,b}
∂f α (F D i G f α − G D i F f α ) ∂p i
+ ∑ ∫ dr ∫ dp q α f α B ⋅ ( α∈{a,b}
∂F f α ∂G f α × ) , ∂p ∂p
(6.120)
where {∙, ∙}(B2) is given by Equation (6.51) and {∙, ∙}(EM) by Equation (3.199). Note that generalization to mixtures of arbitrary number of species is straightforward. Poisson bracket (6.120) of binary kinetic electrodynamics expresses kinematics of distribution functions f a and f b , and fields D and B. Considering a binary mixture of ideal gases, energy of the mixture coupled with an electromagnetic field in a vacuum is E=
∑ ∫ dr ∫ dp α∈{a,b}
p2 f α (r, p) + E(EM)vac , 2m
(6.121)
where the energy of the electromagnetic field in a vacuum was defined in Equation (3.206). With this energy, Poisson bracket (6.120) leads to evolution equations ∂E f α ∂f α ∂f α ∂f α ∂E f α ∂ ∂f α ∂E f α + − qα ED − (ε ijk B i q α f α ) =− ∂t ∂r k ∂p k ∂p k ∂r k ∂p k k ∂p j ∂p k D k ∂f α pk ∂f α p k ∂f α − qα − q α ε jki B i =− m ∂r k ε0 ∂p k ∂p j m p ∂f α p ∂f α − q α (E + × B) ⋅ =− ⋅ m ∂r m ∂p p ∂D = ∇ × H − ∑ q α ∫ dp f α ∂t m α∈{a,b} ∂B = −∇ × E . ∂t
(6.122a) (6.122b) (6.122c) (6.122d) (6.122e)
The first equation contains the Lorentz force and the second contains the electric current density. Electric and magnetic intensities E and H are defined in Equations (3.201).
6.4 Mixtures in electromagnetic fields | 235
Let us now return to the Maxwell equation connecting divergence of the displacement field with charge density. Divergence of Equation (6.122d) gives ∂ t div D = − ∑ q α ∫ dp α∈{a,b}
=
=
∂f α p ⋅ ∂r m
p j ∂f α ] ∂f α ∂f α [ ∑ q α [∫ dp + q2α ∫ dp ε ijk B k + q2α ∫ dp E ⋅ ] ∂t ∂p⏟⏟ m ∂p i ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ α∈{a,b} [ ] =0 1 ∂f α ε ijk δ ij B k f α ] ∑ [q α ∫ dp − q2α ∫ dp ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂t m α∈{a,b} [ =0 ]
= ∂t
∑ ∫ dp q α f α .
(6.123)
α∈{a,b}
Assuming that at a certain time there was no field D and as well as no matter, we obtain that ρα , (6.124a) div D = ∑ q α mα α∈{a,b} where mass density ρ α = ∫ dp m α f α was employed. Divergence of the electric displacement field is therefore equal to the charge density. These equations are of course accompanied by equation (3.203), div B = 0 .
(6.124b)
In summary, the Poisson bracket expressing reversible evolution of a binary charged mixture on the level of binary kinetic theory is obtained by extension of Poisson bracket (3.224). Reversible evolution equations for the particular choice of energy (6.121) generated by the Poisson bracket are Equations (6.122), where the Maxwell equations are coupled with the kinetic theory.
6.4.2 Binary electromagnetohydrodynamics Instead of the distribution functions, it is often advantageous to work with state variables of fluid mechanics analogous to (3.229), ρ α (r) = ∫ dr ∫ dp m α f α (r, p)δ(r − r )
(6.125a)
u α,i (r) = ∫ dr ∫ dp p i f α (r, p)δ(r − r )
(6.125b)
s α (r) = ∫ dr ∫ dp η α (f α (r, p))δ(r − r )
(6.125c)
D(r) = D(r)
(6.125d)
and B(r) = B(r) .
236 | 6 Multicomponent systems
Projection of Poisson bracket (6.120) to these state variables leads to {F, G}(EMHD’2) = {F, G}(FM2) + {F, G}(EM) ρα + ∑ ∫ dr q α (F u α,i G D i − G u α,i F D i ) m α α∈{a,b} + ∑ ∫ dr q α α∈{a,b}
ρα B ⋅ (Fuα × Guα ) , mα
(6.126)
which is analogous to brackets (3.232) and (6.54). Let us refer to this bracket as the binary electromagnetohydrodynamic bracket (EMHD’2). The reason for the prime is the analogy with bracket (3.232). The evolution equations given by the EMHD’2 Poisson bracket are ∂ρ α = −∂ i (ρ α E u α,i ) ∂t ∂u α,i = −ρ α ∂ i E ρ α − u α,j ∂ i E u α,j − s α ∂ i E s α − ∂ j (u α,i E u α,j ) ∂t ρα (E D i + ε ijk E u α,j B k ) + qα mα ∂s α = −∂ i (s α E u α,i ) ∂t ∂D ρα E uα = ∇ × H − ∑ qα ∂t m α α∈{a,b} ∂B = −∇ × E , ∂t
(6.127a)
(6.127b) (6.127c) (6.127d) (6.127e)
where the general definition of electric and magnetic intensities, Equation (3.201), was used. Note the Lorentz force in the equation for momentum density and electric current in the equation for D. These equations are again equipped with div B = 0 and
div D =
∑ qα α∈{a,b}
ρα . mα
(6.127f)
The argument leading to the latter equality is the same as in the preceding Section 6.4.1. The energy functional can be taken for instance as u2α + ε(ρ a , ρ b , s a , s b )) + E(EM)vac , 2ρ α α∈{a,b}
E = ∫ dr ( ∑
(6.128)
6.4 Mixtures in electromagnetic fields | 237
which leads to Euα = vα , D = ε0 E, B = μ0 H and evolution equations ∂ρ α = −∂ i (ρ α v α,i ) ∂t ∂u α,i ρα (E i + ε ijk v α,j B k ) = −ρ α ∂ i E ρ α − s α ∂ i E s α − ∂ j (u α,i v j α ) + q ∂t mα ∂s α = −∂ i (s α v α,i ) ∂t ρα vα ε0 ∂ t E = ∇ × H − ∑ q α m α α∈{a,b} μ 0 ∂ t H = −∇ × E .
(6.129a) (6.129b) (6.129c) (6.129d) (6.129e)
However, the electromagnetic energy can be specified as nonquadratic and dependent on the matter (fields ρ and s). Definitions (3.201) still hold true, but the relations between E and D, and between H and B, become nonlinear as in Section 3.10.4.3, where polarization and magnetization were introduced. In thermodynamic equilibrium, where the velocity of matter is zero and fields do not evolve in time, equations (6.129) further simplify to ∇ × E = 0 , ∇ × H = 0 , div E =
qα ρα ε m α∈{a,b} 0 α ∑
and
div H = 0 .
(6.130)
From the first equation it follows by Helmholtz decomposition that there is a scalar field of electrostatic potential φ(r) such that E = −∇φ .
(6.131)
The third equation then becomes a Poisson equation for the potential, qα ρα , ε m α∈{a,b} 0 α
∆φ = − ∑
(6.132)
which is the fundamental equation of electrostatics. So far we have considered only reversible evolution of the mixture coupled with the electromagnetic field. Now we add dissipation of momenta ua and ub (e.g., friction due to motion through a crystal), and dissipation due to the multiple temperatures (Section 6.3.2). The dissipation potential (for simplicity quadratic) is then 1 1 σ ∗ 2] Ξ = ∫ dr [ ∑ M uα (u∗α )2 + M M ab (σ ) , 2 2 [α∈{a,b} ]
(6.133)
238 | 6 Multicomponent systems
where total entropy s and entropy difference σ are defined by Equations (6.71). Irreversible evolution (4.57) then becomes (
M uα ∂uα ) = − † u†α ∂t irr s
(6.134a)
(
1 ∂s σ ( ∑ M uα (u†α )2 + M ab (σ ∗ )2 ) ) = ∂t irr (s† )2 α∈{a,b}
(
M ∂σ σ† . ) = − ab ∂t irr s†
(6.134b)
σ
(6.134c)
The GENERIC evolution equations of the state variables (6.125) are the sum of Equations (6.127) and Equations (6.134), ∂ρ α = −∂ i (ρ α u †α,i ) ∂t ∂u α,i = −ρ α ∂ i ρ †α − u α,j ∂ i u †α,j − s α ∂ i s†α − ∂ j (u α,i u †α,j ) ∂t ρα † D + ε ijk u †α,j B k ) − ζ α u †α,i + qα ( mα i 1 ∂s 1 = − div (( s + σ) u†a + ( s − σ) u†b ) ∂t 2 2 +
1 ( ∑ ζ α (u†α )2 + K ab (σ † )2 ) s† α∈{a,b}
1 1 1 ∂σ = − div (( s + σ) u†a − ( s − σ) u†b ) − K ab σ † ∂t 2 2 2 ∂D ρ α † uα = ∇ × B† − ∑ q α ∂t m α α∈{a,b} ∂B = −∇ × D† , ∂t
(6.135a)
(6.135b)
(6.135c) (6.135d) (6.135e) (6.135f)
σ where heat exchange coefficient K ab = M ab /s† and friction coefficients ζ α = M uα /s† were introduced. Letting these equations relax by the dynamic MaxEnt reduction setting the MaxEnt values 0 = uα = σ = D = B, and σ † = 0, we obtain in the isothermal case (Section 4.4.2)
∂ρ α = −∂ i (ρ α u †α,i ) ∂t 0 = −ρ α ∇ρ †α + q α (
(6.136a) ρα † D ) − ζ α u†α . mα
(6.136b)
Equation (6.136b) can be interpreted as the generalized Ohm’s and Fick’s law u†α = −
ρα (∇μ α − q α E) , ζα mα
(6.137)
6.4 Mixtures in electromagnetic fields |
239
where E = D† is the electric intensity and μ α is the chemical potential in Joules per number of particles. For potential electric intensity, E = −∇φ, as in the case of electrostatics, the right hand side of Equation (6.137) can be interpreted as being proportional to the gradient of electrochemical potential μ̃ α = μ α + q α φ. Finally, Equations (6.136a) are the balance equations of concentrations of two species a and b, the fluxes of which are determined by the remaining equations (6.136b) and Equations (6.127f). Ohm’s and Fick’s law can be thus recovered by letting all state variables except for the densities relax.
6.4.3 Classical binary electromagnetohydrodynamics Classical binary electrodynamics is the level of projection where state variables are ρ a , ρ b , m, s, D and B, which are defined as ρ a (r) = ρ a (r) ,
(6.138a)
ρ b (r) = ρ b (r) ,
(6.138b)
m(r) = ua + ub + D × B
(6.138c)
s(r) = s a (r) + s b (r) ,
(6.138d)
D(r) = D(r)
(6.138e)
B(r) = B(r) ,
(6.138f)
which is analogous to projection (6.57). In particular, m represents the total momentum density of matter and electromagnetic field. These state variables are advantageous because they facilitate the subsequent projections to electrohydrodynamics and magnetohydrodynamics and because they are compatible with the SHTC framework (Section 5.8), where hyperbolicity of the equations is evident. When bracket (6.126) is evaluated at functionals dependent only on state variables (6.138), it becomes {F, G}(EMHD’) = {F, G}CIT − ∫ dr ε ijk D j B k (∂ l F m i G m l − . . . ) + ∫ dr [(F D i − ε ipq F m p B q )ε ijk ∂ j (G B k + ε krs G m r D s ) − . . . ] + ∫ dr
qα ρα [(F m i (G D i − ε ijk G m j B k ) − . . . ] mα α∈{a,b}
+ ∫ dr
qα ρα B i ε ijk F m j G m k , mα α∈{a,b}
∑
∑
(6.139)
where the terms forming the CIT Poisson bracket (6.60), as in Section 6.2.4, were already collected. The rest of the terms are the same as in the projection from the EMHD’ bracket to the EMHD bracket in Section 3.10.4.4. Therefore, the result of the projection
240 | 6 Multicomponent systems
is the same and we obtain Poisson bracket {F, G}(CEMHD2) = {F, G}(CIT) + {F, G}(EM) + ∫ dr D i (∂ j F D i G m j − ∂ j G D i F m j ) + ∫ dr ∂ j D j (F m i G D i − G m i F D i ) + ∫ dr (F m i D j ∂ j G D i − G m i D j ∂ j F D i ) + ∫ dr B i (∂ j F B i G m j − ∂ j G B i F m j ) + ∫ dr ∂ j B j (F m i G B i − G m i F B i ) + ∫ dr (F m i B j ∂ j G B i − G m i B j ∂ j F B i ) ,
(6.140)
which expresses kinematics of fields (6.138). Bracket {∙, ∙}(CIT) is specified by Equation (6.60), and bracket {F, G}(EM) by Equation (3.199). Poisson bracket (6.140) is equipped with constraints (6.124). Reversible evolution equations generated by Poisson bracket (6.140) are ∂ρ a (6.141a) = − div(ρ a Em ) ∂t ∂ρ b = − div(ρ b Em ) (6.141b) ∂t ∂m i = −∂ j (m i E m j ) − ∑ ρ α ∂ i E ρ α − m j ∂ i E m j − s∂ i E s − D j ∂ i E D j − B j ∂ i E B j ∂t α∈{a,b} + ∂ j (D j E D i + B j E B i ) ∂s = − div (sEm ) ∂t ∂D i = −∂ j (D i E m j − E m i D j − ε ijk E B k ) − E m i ∂ j D j ∂t ∂B i = −∂ j (B i E m j − E m i B j + ε ijk E D k ) − E m i ∂ j B j . ∂t
(6.141c) (6.141d) (6.141e) (6.141f)
Since these equations are compatible with the SHTC framework, they can be shown to be hyperbolic; see e.g., [46].
6.4.4 Binary electrohydrodynamics An advantage of bracket (6.140) is that one can easily make projections to state variables without the D or B field. Let us first choose state variables ρ a , ρ b , m, s and D. Bracket (6.140) evaluated at functionals dependent only on these state variables be-
6.4 Mixtures in electromagnetic fields | 241
comes {F, G}(CEHD2) = {F, G}(CIT) + {F, G}(EM) + ∫ dr D i (∂ j F D i G m j − ∂ j G D i F m j ) + ∫ dr ∂ j D j (F m i G D i − G m i F D i ) + ∫ dr (F m i D j ∂ j G D i − G m i D j ∂ j F D i ) ,
(6.142)
which will be referred to as the classical binary electrohydrodynamic bracket. Reversible evolution equations generated by this bracket are ∂ρ a = − div(ρ a Em ) ∂t ∂ρ b = − div(ρ b Em ) ∂t ∂m i = −∂ j (m i E m j ) − ∑ ρ α ∂ i E ρ α − m j ∂ i E m j − s∂ i E s − D j ∂ i E D j ∂t α∈{a,b} + ∂ j (D j E D i )
(6.143a) (6.143b)
(6.143c)
∂s = − div (sEm ) ∂t ∂D i = −∂ j (D i E m j − E m i D j ) − E m i ∂ j D j . ∂t
(6.143d) (6.143e)
6.4.5 Binary magnetohydrodynamics Alternatively, bracket (6.140) can be evaluated at functionals dependent only on state variables ρ a , ρ b , m, s and B. The bracket then becomes {F, G}(CMHD2) = {F, G}(CIT) + {F, G}(EM) + ∫ dr B i (∂ j F B i G m j − ∂ j G B i F m j ) + ∫ dr ∂ j B j (F m i G B i − G m i F B i ) + ∫ dr (F m i B j ∂ j G B i − G m i B j ∂ j F B i ) ,
(6.144)
which will be referred to as the classical binary magnetohydrodynamic bracket. The evolution equations are the same as Equations (6.143) with field B instead of field D.
7 Contact geometry 7.1 Motivation The following three questions motivate further development of the subjects presented in Chapters 3, 4 and 5.
Question 1 The Gibbs manifold in Section 2.1.1 represents geometrically the fundamental thermodynamic relation. It does not however address in any way the MaxEnt principle from Section 2.7.2. Is it possible to find a geometrical representation of the fundamental thermodynamic relation which also encompasses the MaxEnt principle? Alternatively, we can formulate the question as follows: The MaxEnt principle is, from the mathematical point of view, maximization of a concave function subjected to constraints which is, in other words, a Legendre transformation. We can therefore regard the group of Legendre transformations as the fundamental group of thermodynamics. Following now the arguments developed originally in the context of elementary particle physics, we ask the question of what is the geometrical structure in which the transformations in the fundamental group appear as natural transformations? This is then the natural geometry of the state space.
Question 2 From the geometrical point of view, the formulation of the GENERIC equation from Section 5.1 is not satisfactory. Two very different geometrical structures (symplectic and Riemannian) are needed to transform gradients of two potentials into the vector field. Moreover, the two geometrical structures are not preserved in the course of the time evolution. Is it possible to formulate the GENERIC equation (5.1) in such a way that the vector field arises as a gradient of a single potential transformed into a vector by a single geometrical structure that is preserved in the course of the time evolution?
Question 3 The MaxEnt passage from a mesoscopic level the equilibrium level, made in (2.7.2) by a Legendre transformation, is made in Chapter 5 by following the time evolution generated by the GENERIC equation (5.1). Can we see the Legendre transformations (and thus thermodynamics) directly in the GENERIC equation (5.1)? https://doi.org/10.1515/9783110350951-007
244 | 7 Contact geometry
In this chapter we show that all three questions are answered by lifting the formulation presented in previous chapters to a larger space in which the conjugate variables as well as the entropy are regarded as independent state variables. The fundamental thermodynamic relation, which makes the added extra variables dependent variables, takes then the form of a submanifold (we call it a Gibbs–Legendre manifold, or briefly GL manifold) embedded in the large space. The large space is naturally equipped with a geometrical structure (contact structure) and the GL manifold is a distinguished submanifold in the contact geometry. The Legendre transformations are the natural transformations in the contact geometry, since they preserve the contact structure. The GENERIC time evolution appears as a contact structure preserving time evolution restricted to its invariant submanifold that is the GL manifold. The state space on which the GENERIC time evolution takes place is thus the GL manifold. The generating potential is a sum of two potentials, one generating the Hamiltonian part and the other the dissipative part of GENERIC. We shall present the contact dynamics first as a simple mathematical reformulation of the GENERIC dynamics. The advantage of such a presentation is that all the calculations are clear, elementary and explicit. No previous knowledge of the contact geometry is required. The disadvantage is that the reformulation comes ’out of the blue’. It is indeed the contact geometry that provides the guide and the motivation for making the reformulation. There are however two problems with the presentation focused on the geometry. First, details of the differential geometry are out of the scope of this book. Second (and this is a more fundamental reason), the contact geometry is well developed for finite dimensional manifolds. In the infinite dimensional environment, that, as we explained in Section 5.1, is natural and unavoidable in mesoscopic dynamics and thermodynamics. The finite dimensional geometry provides, in most cases, only the motivation but not a rigorous basis.
7.2 Contact GENERIC We begin by introducing a space 𝕄(cont) = M × M∗ × N∗eq × Neq × ℝ
(7.1)
with coordinates (x, x∗ , y∗ , y, ϕ). The space M with elements x is the state space; the space M∗ with elements x∗ is its dual. Similarly, Neq with elements y is the state space on the equilibrium level; N∗eq with elements y∗ is its dual. We recall that y = (E, N) and y∗ = (E∗ , N ∗ ), where E∗ = 1/T and N ∗ = −μ/T (Equations (2.2)). We moreover introduce the fundamental thermodynamic relation S = S(x), y = y(x) represented in M × Neq × ℝ by the Gibbs manifold M(G) that is the image of the mapping x → (x, y(x), S(x)) .
(7.2)
7.2 Contact GENERIC |
245
Corresponding to the fundamental thermodynamic relation is the thermodynamic potential Φ(x, y∗ ) = −S(x) + ⟨y∗ , y(x)⟩, where ⟨, ⟩ denotes the inner product as in Section 2.4.2. The Gibbs manifold M(G) can be now extended to the Gibbs–Legendre manifold (GL) that is the image of the mapping M (x, y∗ ) → (x, Φ x (x, y∗ ), y∗ , Φ y∗ (x, y∗ ), Φ(x, y∗ ))
(7.3)
in 𝕄(cont) . The thermodynamics in M is completely expressed in the GL manifold M(GL) . Note that [M(GL) ]y∗ =0 (i.e., the image of the mapping (x, 0) → (x, −S x (x), 0, y(x), −S(x))
(7.4)
in the space M × M∗ × Neq × ℝ) is an extension of the Gibbs manifold M(G) by including the conjugate variable x∗ . Moreover, the manifold [M(GL) ]x∗ =S x =0 displays the states xeq (y∗ ) that represent in M the equilibrium states and also the fundamental thermodynamic relation S∗ (y∗ ), y(y∗ ) in Neq implied by the fundamental thermodynamic relation S(x), y(x) in M. Indeed [M(GL) ]x∗ =0 is the image of the mapping (x, y∗ ) → (xeq (y∗ ), 0, y∗ , y(xeq (y∗ )), S∗ (y∗ )) .
(7.5)
Let us turn to the time evolution in 𝕄(cont) . We begin by introducing in 𝕄(cont) a bracket {A, B}(cont) = (⟨A x , B x∗ ⟩ − ⟨B x , A x∗ ⟩) − (⟨A y , B y∗ ⟩ − ⟨B y , A y∗ ⟩) − (⟨x∗ , A x∗ ⟩B ϕ − ⟨x∗ , B x∗ ⟩A ϕ ) + (AB ϕ − BA ϕ ) + (⟨A y , y⟩B ϕ − ⟨B y , y⟩A ϕ ) ,
(7.6)
where A and B are sufficiently regular functions 𝕄(cont) → ℝ. This bracket consists of two contact brackets (equation 95 of paper [27]). With such brackets, we introduce the time evolution in 𝕄(cont) by an equation (cont) (cont) − AH ϕ , Ȧ = {A, H (cont) }
(7.7)
which is required to hold for all A. The function H (cont) : 𝕄(cont) → ℝ, called a contact Hamiltonian, will be specified below. The last term on the right hand side corresponds to the nonconservation of the phase space volume [170]. Written explicitly, the time evolution equations (7.7) take the form (cont) ẋ = H x∗
x∗̇
=
(cont) −H x
(7.8a) −x
∗
(cont) Hϕ
(7.8b)
246 | 7 Contact geometry (cont)
y∗̇ = H y ẏ =
(cont) −H y∗
(7.8c) +
(cont) yH ϕ
(7.8d)
(cont) (cont) ϕ̇ = −H (cont) + ⟨x∗ , H x∗ ⟩ − ⟨H y , y⟩ .
(7.8e)
These are the evolution equations in 𝕄. Next, we specify the contact Hamiltonian H (cont) H (cont) (x, x∗ , y∗ , y, ϕ) = −S(cont) (x, x∗ , y∗ ) + where
1 (cont) E (x, x∗ , y∗ ) , E∗
(7.9)
S(cont) (x, x∗ , y∗ ) = Ξ(x, x∗ , y∗ ) − [Ξ(x, x∗ , y∗ )]x∗ =Φ x E(cont) (x, x∗ , y∗ ) = ⟨x∗ , LΦ x ⟩
(7.10)
Ξ is the dissipation potential entering GENERIC as in Equation (4.21) and L is the Poisson bivector also entering GENERIC as in Equation (3.18). Both Ξ and L are degenerate in the sense ⟨x∗ , LS x ⟩ = ⟨x∗ , LN x ⟩ = 0 , ∀x∗ ⟨E x , Ξ x∗ ⟩ = ⟨N x , Ξ x∗ ⟩ = 0 ,
∀x∗
⟨x∗ , [Ξ x∗ ]x∗ =E x ⟩ = ⟨x∗ , [Ξ x∗ ]x∗ =M x ⟩ = 0 ,
∀x∗ .
(7.11)
We note in particular that the contact Hamiltonian (7.9) is independent of y and ϕ. With (7.9), the time evolution equations (7.8a) become 1 LΦ x − Ξ x∗ E∗ 1 1 = Φ xx ( ∗ Lx∗ − [Ξ x∗ ]x∗ =Φ x ) − ∗ ⟨x∗ , L x Φ x ⟩ + Ξ x − [Ξ x ]x∗ =Φ x E E = −⟨x∗ , Ξ x∗ + Ξ − [Ξ]x∗ =Φ x
ẋ = x∗̇
ϕ̇ y∗̇ = 0
(7.12a) (7.12b) (7.12c) (7.12d)
ẏ = Ξ y∗ − Ξ y∗ |x∗ =Φ x .
(7.12e)
If we now evaluate (7.12a) on the GL manifold M(GL) (note that [H (cont) ]M(GL) = 0) we arrive at 1 LΦ x − Ξ x∗ |(x∗ =Φ x ,y=Φ y∗ ) E∗ 1 x∗̇ = Φ xx ( ∗ LΦ x − [Ξ x∗ ](x∗ =Φ x ,y=Φ y∗ ) ) E ϕ̇ = −⟨x∗ , Ξ x∗ ⟩|(x∗ =Φ x ,y=Φ y∗ ) y∗̇ = 0 ẋ =
ẏ = 0 , which are the GENERIC evolution equations.
(7.13a) (7.13b) (7.13c) (7.13d) (7.13e)
7.3 Observations
| 247
7.3 Observations We now make a few observations.
Observation 1 As we see clearly from (7.13a), the GL manifold M(GL) is an invariant manifold and on it the time evolution governed by (7.7) is the GENERIC time evolution governed by GENERIC. With the time evolution governed by (7.7) we are therefore coming very close to answering Question 2 and Question 3. We have indeed a single structure in the space 𝕄(cont) (defined by the bracket (7.6)) transforming the gradient of one potential H (cont) into the vector field. The potential H (cont) is a sum of two terms: one, E(cont) , representing the Hamiltonian part of the dynamics; and the other, S(cont) , representing the gradient dynamics. We however still do not know if the structure transforming the gradient of H (cont) into the vector field is preserved in the course of the time evolution. We also cannot completely answer Question 1. We only see that the GL manifold M(GL) is a very good candidate for the geometrical representation of thermodynamics that includes both the fundamental thermodynamic relation and MaxEnt principle. The connection to Legendre transformations remains however unclear. In order be able to answer completely Question 1, Question 2, and Question 3, we have to bring into the consideration the geometrical interpretations of (7.7). We shall do it below in the third observation.
Observation 2 It is well known that the Hamilton dynamics allows variational formulation (Hamilton’s variational principle). Such formulation does not extend however to the GENERIC dynamics. It is therefore remarkable that the variational principle does extend to the formulation (7.12a) of GENERIC. We introduce a functional ̇ . I = ∫ dt (H (cont) (x, x∗ , y∗ ) − ⟨x∗ , x⟩)
(7.14)
This functional restricted to the GL manifold, i.e., [I]M(GL) , has the physical interpretation of the total entropy generated during the complete time evolution. The Euler– Lagrange equations δI = 0 (variations with respect to both x and x∗ ) on M(GL) become equivalent to GENERIC. We have thus shown that the total entropy generated during the GENERIC time evolution reaches its extremum. This consequence of the reformulation (7.7) of GENERIC is in fact a surprise. We have not anticipated it in the questions that motivated the reformulation (7.7).
248 | 7 Contact geometry
Observation 3 So far, we have not used in any way the methods and results of differential geometry. We have directly verified that the time evolution in 𝕄(cont) generated by (7.7) represents indeed a reformulation of GENERIC that has many advantages anticipated in Question 1, Question 2, and Question 3. We now briefly explain the geometrical content of the reformulation (7.7) of GENERIC. We do not present the technical details for the following three reasons: (i) such discussion is out of the scope of this book; (ii) the technical details can easily be found in the literature for the finite dimensional manifolds (see e.g., [170, 171]); and (iii) rigorous mathematical formulations in the infinite dimensional setting that we need in the mesoscopic dynamics and thermodynamics are still not well developed. The formulation below has only a formal meaning in the infinite dimensional setting. The space 𝕄(cont) is naturally equipped with 1-form θ = dϕ − x∗ dx − y dy∗ . This 1-form is a contact form if it satisfies the condition of ’complete nonintegrability’. With the help of the Frobenius theorem, this condition can be expressed as the requirement that the volume element in 𝕄(cont) constructed in 𝕄(cont) with θ, i.e., θ ∧ (dθ)n , is different from zero. We use the symbol ∧ to denote the wedge product and a d to denote the exterior derivative. Alternatively, the complete nonintegrability can be defined by requiring that there is no submanifold of dimension greater than n+2 (we consider the space M to have the dimension n, the space N∗eq has dimension 2) that is integrable. The GL manifold is the manifold on which the 1-form θ equals zero. Such a manifold is called in the context of the contact geometry a Legendre manifold. Since it is an extension from M × N∗eq to 𝕄(cont) of the Gibbs manifold expressing the fundamental thermodynamic relation, we call it a Gibbs–Legendre manifold (GL manifold). Dynamics (7.7) can also be seen as a consequence of the construction of the contact Hamiltonian vector field X H that satisfies −H = ⟨θ, X H ⟩; see [170] or [27]. Evolution of a functional is then given by Ȧ = X H A, which is equivalent to (7.7). The transformations 𝕄(cont) → 𝕄(cont) preserving (up to a multiplicative factor) the 1-form θ are called contact (or Legendre) transformations. The time evolution governed by (7.7) preserves the contact structure (see e.g., [26, 170] or [27]). This explains the origin of (7.7) and also provides a complete answer to Question 2 and Question 3. Due to the close relationship between the GL manifold and Legendre transformations, we have also arrived at a complete answer to Question 1. Since the symplectic geometry is more familiar than the contact geometry and since we have already used it in Chapter 3, we recall the concepts arising in the symplectic geometry that are analogous to the concepts introduced in the previous paragraph. The symplectic geometry is defined by a symplectic 2-form that plays the analogous role as the 1-form θ in the contact geometry. The manifold on which the symplectic 2-form equals zero is called in the symplectic geometry a Lagrange manifold. This manifold thus plays the analogous role in the symplectic geometry as the Legendre manifold in the contact geometry. The transformations that preserve the symplec-
7.3 Observations
|
249
tic 2-form are called canonical transformations. These transformations thus play the analogous role as Legendre transformations in the context of the contact geometry. The time evolution preserving the 2-form are generated by Hamilton’s equations, and the time evolution preserving the contact 1-form θ are generated by (7.7) (compare the equation Ȧ = {A, H}) with (7.7)). We note that contrary to the Hamiltonian dynamics where the generating potential (i.e., the energy) is conserved, we have in the contact (cont) (cont) dynamics Ḣ (cont) = −H ϕ H (since {H (cont) , H (cont) }(cont) = 0). In our case how-
ever, since H (cont) given in (7.9) is independent of ϕ, the generating potential is also conserved.
Observation 4 The pertinence of the contact geometry was noted by Robert Hermann in [172]. The idea of lifting the GENERIC dynamics to the GL manifold appeared first in [173]. The reformulation (7.7) also appeared in [123] and [174].
Observation 5 The unexplored landscape that opens up on the route that we have started in this chapter includes, for instance, the following problems: (i) What is the physical interpretation of the time evolution (7.7) outside the GL manifold? The GL manifold is most likely not an attracting (stable) manifold. We can modify (7.7) by adding a ’dissipative term’ making the GL manifold a stable manifold (Section 4.3.4 in [174]). Such modified time evolution could then be very useful in numerical realizations of Legendre transformations. (ii) The contact Hamiltonian (7.9) that, as we have shown above, makes (7.7) into an equivalent reformulation of GENERIC, is very special and restricted. What is the physical interpretation of the time evolution with more general contact Hamiltonians (for instance those depending on ϕ)? (iii) In the setting of classical thermodynamics, the GL manifold has been equipped with several metric structures [170, 171, 175–177]. How do the analogous metric structures on the GL manifolds in the mesoscopic thermodynamics relate to those in the classical thermodynamics? What does GENERIC dynamics look like on the GL manifold equipped with the metric structure?
A Mathematical aspects A.1 Partial derivatives Partial derivatives of functions of multiple variables are of course ubiquitous in physics. Let us recall a useful notation developed in textbook [5], that might be called the Landau notation. Consider a function from ℝ2 to ℝ2 , mapping (x, y) to (f(x, y), g(x, y)). Determinant of the Jacobi matrix of the function is then ∂f ( ∂x ) ∂(f, g) def = det ( ∂g y ∂(x, y) ( ∂x ) y
∂f ( ∂y )
( ∂g ∂y )
x)
.
(A.1)
x
Considering another function mapping (u, v) to (x(u, v), y(u, v)), and using that the determinant of product of two matrices is product of determinants, we obtain ∂(f, g) ∂(x, y) ∂(f, g) ⋅ = . ∂(x, y) ∂(u, v) ∂(u, v)
(A.2)
Moreover, partial derivatives can be cast into the determinant form as (
∂f ∂(f, y) ) = . ∂x y ∂(x, y)
(A.3)
Finally, the derivative of inverse function is (
∂(f, y) −1 ∂(x, y) ∂x ) =( ) = . ∂f y ∂(x, y) ∂(f, y)
(A.4)
This formalism can be used for example for a fast proof of relation: (
∂x ∂y ∂z ) ( ) ( ) = −1 . ∂y z ∂z x ∂x y
(A.5)
Just rewrite the derivatives using the determinants. This is especially useful in proving thermodynamic inequalities e.g., in Section 2.6.5.
A.2 Functional derivatives Consider a field state variable, e.g., density ρ(r). It is often necessary to express how a functional A(ρ) of the state variable changes when the state variable varies – a functional derivative is needed. Before going into more mathematical results, let us first summarize the use in physics, where we do not usually specify any function spaces or regularity conditions. https://doi.org/10.1515/9783110350951-008
252 | A Mathematical aspects The functional derivative of functional A with respect to the field ρ, A ρ ≡ δA/δρ is determined from the Gateaux derivative d δA A(ρ + λδρ) = ⟨ , δρ⟩ . (A.6) dλ λ=0 δρ That means that we first write the Gateaux derivative (left hand side) and then cast it into the form of product (most frequently integral) of A ρ and the variation δρ. The terms multiplying δρ are then called the functional derivative δA/δρ. Now we proceed to further mathematical discussion. Given a functional A : x → A(x) ∈ ℂ, x ∈ ℝn , how should we define its time derivative when x = x(t)? This is addressed in variational calculus where variations of functionals map admissible functions (sufficiently smooth and satisfying boundary conditions) to real numbers typically via integration. Variational derivative of a functional S at x is the function of time δS/δx : [a, b] → ℝ such that b
dS(x)h = ∫ a
δS h(t) d t , δx(t)
where dS(x)h is Gateaux derivative of S at x in the direction h, i.e., dS(x)h =
d S(x + ϵh)|ϵ=0 . dϵ
Note that Frechet derivative is the linear functional dS(x) that maps h to dS(x)h. When denoting the L2 inner product as (, ) we can write the action of the Frechet derivative of S at x on h as (δS/δx(t), h(t)). With dS(x) being the Frechet derivative of functional S at x, we define the variational derivative to be a generalized function (distribution) δS/δx ∈ D so that (
δS , φ) := dS(x)φ , δx
∀φ ∈ D .
(A.7)
Note that for regular distributions δS/δx, which have a one-to-one counterpart in L1loc functions, this definition exactly coincides with the classical definition of a variational derivative for functionals S acting via integration. That is also the reason for the use of integral notation of action of generalized functions. In particular, instead of the usual S(φ) we opt to write (S, φ) or even ∫ dr S⋅φ. We use the standard notation for the space of test compactly supported smooth functions D = C∞ 0 , where D stands for the dual space, being equipped both with particular concepts of convergence that are suitable for circumventing the issues of nonexistence of derivatives of classical functions and natural introduction of delta functions. For more details see the monographs [178, 179]. The choice of compactly supported test functions might seem to be too restrictive, but it corresponds to the restriction of admissible perturbation functions one considers in the classical definition of a variational derivative. As the functional is evaluated
A.2 Functional derivatives
| 253
at both x and x + δx, one obtains an admissibility condition for perturbation to be vanishing at the boundary. From the meaning of a Gateaux derivative we can also write an approximation of a functional evaluated at a perturbed value of the field A(ρ + δρ) = A(ρ) + (
δA , δρ) + O(δρ)2 , δρ
(A.8)
stating that the variational derivative is the best linear approximation of A(ρ + δρ). To illustrate these definitions, let us consider few examples. 1. A classical example of variation of a functional For example, when the functional is just an integral of a real-valued function of ρ, A(ρ) = ∫ dr σ(ρ) ,
(A.9)
d dσ ∫ dr σ(ρ + ϵδρ) = ∫ dr δρ , dϵ ϵ=0 dρ
(A.10)
equation (A.8) gives
which means that δA/δρ = σ , and the functional derivative is thus equal to standard derivative of the real-valued function σ. The functional can, however, also depend on spatial gradients of the state variable, 1 (A.11) A(ρ) = ∫ dr ∇ρ ⋅ ∇ρ . 2 Formula (A.8) then gives d 1 ∫ dr ∇(ρ + λδρ) ⋅ ∇(ρ + λδρ) dλ λ=0 2 1 1 d = ∫ dr ∇ρ ⋅ ∇ρ + λ∇ρ ⋅ ∇(δρ) + λ2 ∇(δρ) ⋅ ∇(δρ) dλ λ=0 2 2 = ∫ dr ∇ρ ⋅ ∇(δρ) = − ∫ dr ∇ ⋅ (∇ρ)δρ . Note that the boundary terms stemming from the integration by parts are dropped as variations are assumed to vanish at the boundary so that ρ + λδρ are admissible functions for all small enough λ or the system is considered on a torus. The functional derivative then becomes the Laplacian of ρ, A ρ = −∇ ⋅ ∇ρ . Higher spatial derivatives can be handled analogously.
(A.12)
254 | A Mathematical aspects
2. Variation of a field w.r.t. the same field but at a different location Consider a functional S : D → R, S : φ → φ(x) for a fixed x ∈ ℝ, hence S is the delta function. In particular, with the choice S(t) = δ(t−x), we have (S, φ) = (δ(t−x), φ(t)) = φ(x). Its functional derivative can be obtained as follows: lim
ϵ→0
1 1 [(S, φ + ϵh) − (S, φ)] = lim [(φ + ϵh) (x) − φ(x)] = h(x) = (δ(t − x), h(t)) , ϵ→0 ϵ ϵ
which can be written in slightly stretched but intelligible notation as δ(S(x), φ(x)) δφ(x) = = δ(x − t) . δφ(t) δφ(t) Similarly, one can show that with the choice of T : D → ℝ, (T, φ) = φ (x) the variational derivative is
δ(T(x), φ(x)) δφ (x) = = −∂ t δ(x − t) δφ(t) δφ(t) where we used the definition of derivative ∂ t : D → D , (∂ t T, φ) = −(T, ∂ t φ).
A.3 Legendre transformation Legendre transformation is a very helpful and perhaps not so well known tool in both mathematics and physics with a tight link to contact geometry. On the mathematical side it is a reversible conversion (under certain assumptions) of one continuous scalar function into another one, such that is suitable for constrained extrema. The most typical encounter of Legendre transformations is in physics where it links thermodynamic potentials to each other together with its extrema subjected to constraints, which are the conditions for direction of time evolution of a given system. We recommend the interested reader consult [2] for physically motivated discussion of Legendre transformation. For our purposes let us summarize the Legendre transformation of a sufficiently regular scalar function into another one by means of changing part of its independent (state) variables x. Given a function f = f(x1 , . . . , x n ; z1 , . . . , z m ) = f(x; z)
(A.13)
its Legendre transformation is the function ̂ z); z) + ⟨x(y; ̂ z), y⟩ , f ̂(y1 , . . . , y n ; z) = f ̂(y; z) = −f(x(y; where the new independent variables y are tied to the old independent variables via y j = ∂ x j f , which is used for obtaining x.̂ In particular, a solution of y j = ∂ x j f(x; z) ̂ z) and is used for eliminating x from the Legendre transformation is denoted as x(y;
A.3 Legendre transformation
|
255
relation f ̂ = −f + ⟨x, y⟩. The local existence of the function x̂ is guaranteed by the implicit function theorem if the determinant of Hessian of f is nonzero, |∂2x i ,x j f| ≠ 0. This requirement is usually satisfied in physical applications with f being a thermodynamic potential, convexity or concavity of which stems from stability of the system; Section 2.6.5. The above requirement for relationship among the new x and old y state variables can be rewritten in a more compact form by introducing an auxiliary function ϕ(x, y; z) = −f(x; z) + ⟨x, y⟩ ,
(A.14)
where the relationship x̂ among state variables x and y is equivalent to finding a manifold x(y) where all the extrema of ϕ are localized. In particular, Legendre transformation of f(x; z) in the independent variables x can be obtained via the following steps: 1. Define an auxiliary function ϕ(x, y; z) = −f(x; z) + ⟨x, y⟩. ̂ z). 2. Solve the n equations 0 = ∂ x j ϕ(x, y; z), ∀j ∈ 1, . . . , n to obtain x(y; ̂ ̂ z), y; z). 3. Identify the Legendre transformation of f as f (y; z) = ϕ(x(y; We shall now demonstrate the relation between Legendre transformation of f(x) to f ̂(y) and maximization of f(x) subjected to constraints π(x) = y, which will be used later for finding entropy on a given level of description via a reduction of entropy from a higher level of description by using maximum entropy (MaxEnt) principle. Let f be a sufficiently regular and concave function (a sufficient condition guaranteeing nonzero determinant of Hessian of f ) of x. Further, let π(x) = y denote the relation of variables x and y. We introduce a function ϕ1 (x, y∗ ) = −f(x) + ⟨y∗ , π(x)⟩ , where y∗ are Lagrange multipliers whose meaning will be revealed below. Next, we find a minimum of ϕ1 , i.e., we solve equation ∂ϕ1 =0. ∂x j
(A.15)
We have already assumed that f is a concave function of x. We shall moreover assume that the mapping π is such that the thermodynamic potential ϕ1 (x, y∗ ) is a convex function of x. ̂ ∗ ). If we evaluate ϕ1 at this state, we obtain Let a solution to (A.15) be x(y ̂ ∗ ), y∗ ) . f ∗ (y∗ ) = ϕ1 (x(y
(A.16)
We further introduce a function ϕ2 (y∗ , y) = −f ∗ (y∗ ) + ⟨y∗ , y⟩ .
(A.17)
256 | A Mathematical aspects
Let a solution of
∂ϕ2 =0 ∂y∗j
(A.18)
be ŷ ∗ (y), which gives a meaning to y∗ as ∂ y∗j f ∗ = y j . Hence the first transformation f(x) to f ∗ (y∗ ) was indeed a Legendre transformation. Finally, the function f ̂(y) defined by
f ̂(y) = ϕ2 (ŷ ∗ (y), y)
(A.19)
is then the twofold Legendre transformation image of f(x) under the mapping π(x) = y. The procedure indeed ends with the same result as maximization of f with constraints given by requiring the projection π to have a constant image, i.e., the relation π between state variables x and y holds. To show this, let us therefore start with the final result of the twofold Legendre transformation, function f ̂, and go backwards so that the relation to the f is revealed explicitly. Using Equation (A.17) we have f ̂(y) = −f ∗ (ŷ ∗ (y)) + ⟨(ŷ ∗ (y), y⟩ = f(x(̂ ŷ ∗ (y))) − ⟨ŷ ∗ (y), π(x(̂ ŷ ∗ (y))) − y⟩ .
(A.20)
Using equations (A.16) and (A.17) in Equation (A.18) leads to ∂ ̂ ∗ ) + ⟨y∗ , π(x(y ̂ ∗ ))⟩) = y . (−f(x(y ∂y∗ ŷ ∗ (y)
(A.21)
Derivative of the first term can be rewritten as ∂x̂ ∂x̂ ∂ ∂f ∂π ∗ ∗ ̂ ̂ f( x(y ) = = (y), y ⟩ , ⟨ ∂y∗ ŷ ∗ (y) ∂x x(̂ ŷ ∗ (y)) ∂y∗ ŷ ∗ (y) ∂x x(̂ ŷ∗ (y)) ∂y∗ ŷ ∗ (y)
(A.22)
where we used Equation (A.18). Plugging this last equation into Equation (A.21) finally leads to π(x(̂ ŷ ∗ (y))) = y , (A.23) and the function f ̂(y) implied by function f(x), Equation (A.20), becomes f ̂(y) = f(x(̂ ŷ ∗ (y))) .
(A.24)
To show that this indeed is the result that can be obtained by simple maximization of the original function f(x) with constraints given by the relation π(x) = y, it is sufficient to show that the point at which functions are evaluated is the same in both procedures. Simple maximization of function f(x) with respect to a constraint π(x) = y proceeds as follows. We introduce a Lagrange function ϕxtr (x, y∗ ) = −f(x) + ⟨y∗ , π(x) − y⟩ .
A.4 Note about multiplication of delta functions | 257
Extrema x̂ xtr (y) are stationary points of ϕxtr , i.e., vanishing gradient equations 0 = ∂x ϕxtr ,
0 = ∂y∗ ϕxtr = π(x) − y
yield both x̂ xtr (y) and ŷ ∗xtr (y). Finally, we have ̂ (y) = f(x̂ xtr (y)) . fxtr
(A.25)
From equations (A.18) and (A.23) it follows, moreover, that x̂ xtr (y) = x(̂ ŷ ∗ (y) ŷ ∗xtr (y)
and
(A.26a)
̂∗
= y (y) .
(A.26b)
Comparing Equation (A.24) to Equation (A.25) with (A.26) then leads to the conclusion that indeed the twofold Legendre transformation can be regarded as a maximization with respect to the constraint that the image of projection π(x) = y is constant, i.e., the relation among state variables holds.
A.4 Note about multiplication of delta functions Within GENERIC one often invokes a Dirac delta function δ(r−r ) and its derivatives in the Poisson bivector for localized quantities, but in a linear manner; see Section 3.7.1. Hence the application of a Poisson bivector on the gradient of energy is well defined (up to regularity concerns). Problems start with multiplication of generalized functions. Luckily enough, this is typically limited only to multiplication of two Dirac delta functions or derivatives thereof for the case of multiplication of two singular distribution functions. It seems that the mathematics get too much involved at this point, and physics, as usual, outpaced mathematics in this (hopefully only temporarily). Consider, for example, the following ’intuitively treated’ situation: ∫ dr ∫ dp f(r, p) (
∂mδ(ra − r) ∂p j δ(r b − r) ∂δ(ra − r b ) , ) = ρ(r b ) j ∂p k ∂r k ∂r b
where ρ(r a ) = ∫ dr ∫ dp mf(r, p)δ(r − r a ) . We treat both Dirac delta functions in an intuitive way, in particular that the derivative of their multiplication follows the Leibniz rule and that δ(r−r a )δ(r−r b ) = δ(r a −r b )δ(r− r b ) = δ(r a − r b )δ(r − r a ). Multiplication of generalized functions is, however, possible only in very special cases, and multiplication of Dirac distributions requires highly nontrivial extensions of the original theory of distributions, for instance associativity of multiplication cannot be expected in principle [180–182].
258 | A Mathematical aspects
The problem is as follows. We have both that (φ is a test function) (
∂ ∂ (δ(r − r a )δ(r − r b )), φ(r, rb )) = − (δ(r − r a )δ(r − r b ), k φ(r, rb )) k ∂r ∂r ∂ ∂ = − (δ(r a − r b )δ(r − r b ), k φ(r, rb )) = (δ(r a − r b ) k (δ(r − r b )), φ(r, rb )) ∂r ∂r
and that, due to the intuitive property of derivative, ∂ ∂ ∂ (δ(r − r a )δ(r − r b )) = ( k δ(r − r a )) δ(r − r b ) + δ(r − r a ) k (δ(r − r b )) . ∂r k ∂r ∂r Let us introduce a single layer potential δ S , which is one of the possible extensions of the concept of singular objects into higher dimensions (in 1D this corresponds only to a point, in 3D one can still have a point source but also linear or planar sources that would still act in a singular way), which has the following action: (δ S , ϕ) = ∫ ϕ dS S
for S with a piecewise smooth boundary. Hence the δ(r − rb ) is rather a single layer potential δ S with S ≡ r = r b . The problem appears immediately now as ∂ ∂ δ(r − r b ) = k δr=rb = 0 ∂r k ∂r because (
∂ ∂ δr=rb , ϕ(r, r b )) = − ∫ k ϕ(r, r b )rb =r dr = 0 , ∂r k ∂r n R
where we have taken into account Fubini’s theorem and the fact that test functions have compact support. Hence the intuitive treatment of the multiplication of delta functions that we used in our example leads to ∂ ∂ ∂ (δ(r − r a )) = k (δ(r b − r a )δr=rb ) = δ(r a − r b ) ( k δr=rb ) = 0 k ∂r ∂r ∂r ∂ ∂ ∂ = ( k δ(r − r a )) δr=rb + δ(r − r a ) ( k δr=rb ) = ( k δ(r − r a )) δr=rb ∂r ∂r ∂r requiring ∫ dr ∫ dp f(r, p) (
∂mδ(r a − r) ∂p j δ(r b − r) ∂δ(ra − r b ) ) = ρ(r b ) =0. j k ∂p ∂r k ∂r b
On the other hand, we can circumvent this problem via taking limits (regularization), but it takes a lot of effort to carry out such calculations, which have to be repeated at least in principle in each and every case, and thus we provide an example below just for illustration. Therefore, we should rephrase our definition of local quan-
A.4 Note about multiplication of delta functions |
259
tities so that it does not entail Dirac delta functions but its presence just refers to the local property of a given quantity and can be properly calculated as in the example below. Correct calculation We shall use the following identity in generalized functions: δ(r − r a ) = lim N(r; ra , ϵ2 ) , ϵ a →0+
where N(r; ra , ϵ2 ) is a Gauss distribution function with mean at ra and standard deviation ϵ a . Note that N(r; r a , ϵ2 ) = ϵ−n a N((r − r a )/ϵ a ; 0, 1). ({ρ(r a ), u j (r b )}(B) , φ(r, rb )) = “((
∂mδ(r a − r) ∂p j δ(r b − r) , f(r, p)), φ(r b ))” ∂p k ∂r k
= “m((
∂δ(ra − r) δ(r b − r) ⊗ 1(p), f(r, p)), φ(r b ))” ∂r j
= lim
lim m((
ϵ a →0+ ϵ b →0+
= − lim
∂N(r; r a , ϵ2a ) N(r; rb , ϵ2b ) ⊗ 1(p), f(r, p)), φ(r b )) ∂r j
lim m((1(p) ⊗ N(r; r a , ϵ2a ),
ϵ a →0+ ϵ b →0+
∂N(r; r b , ϵ2b ) ∂f(r, p) f(r, p) + N(r; rb , ϵ2b ) ), φ(rb )) . ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂r j ∂r j A
B
As ∂N(r; rb , ϵ2b )/∂r j = −ϵ−n b (∂N((r − r b )/ϵ b ; 0, 1)/∂r b ) we can rewrite the term A as follows: j
A = − lim
2 lim mϵ−n b ( (1(p) ⊗ N(r; r a , ϵ a ), N (
ϵ a →0+ ϵ b →0+
= − lim
r − rb ∂φ(rb ) ; 0, 1) f(r, p)) , ) j ϵb ∂r b
2 lim mϵ−n b (1(p) ⊗ N(r; r a , ϵ a ), f(r, p)(N (
ϵ a →0+ ϵ b →0+
= {affine transformation yb =
r − rb } ϵb
r − rb ∂φ(rb ) ; 0, 1) , )) j ϵb ∂r b
n = − lim m(1(p) ⊗ N(r; r a , ϵ2a ), f(r, p) lim ϵ−n b (N(y b ; 0, 1), ϵ b ϵ a →0+
ϵ b →0+
∂ j
∂r b
φ(−ϵ b yb + r)))
∂ = − lim m(1(p) ⊗ N(r; r a , ϵ2a ), f(r, p) (N(yb ; 0, 1), j φ(r))) ϵ a →0+ ∂r ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ =
= − lim m(1(p), ( ϵ a →0+
∂ ∂r j
φ(r)
∂ ∂ N(r; ra , ϵ2a )f(r, p) + N(r; ra , ϵ2a ) j f(r, p) , φ(r))) . ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂r j ∂r Aa
Ab
260 | A Mathematical aspects
The term Aa can be rewritten as r − ra ; 0, 1) f(r, p), φ(r))) ϵa r − ra } = {affine transformation ya = ϵa ∂ = − lim m j (1(p), (N(y a ; 0, 1), f(ϵ a ya + r a , p)φ(ϵ a ya + r a ))) ϵ a →0+ ∂r a ∂ = −m j (1(p), (N(y a ; 0, 1), f(r a , p)φ(ra ))) ∂r a ∂ = − j [φ(r a ) (1(p) ⊗ N(y a ; 0, 1), mf(ra , p))] ∂r a ∂ = − j [φ(r a ) (1(p), mf(r a , p))] ∂r a ∂ ∂ = − j [φ(ra ) (δ(r − r a ) ⊗ 1(p), mf(r, p)) ] = − j [φ(ra ) ∫ dp mf(ra , p) ] ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ ∂r a ∂r a
Aa = − lim mϵ−n a ϵ a →0+
∂
j ∂r a
(1(p), (N (
ρ(ra )
ρ(ra )
= ((
∂ j
∂r b
δ(r a − r b ))ρ(r b ), φ(r b )) .
It remains to prove that Ab + B = 0. This can be shown by the same ideas that we applied in the above simplifications of A and Aa.
A.5 Manipulations with Poisson brackets Due to the generality and abstractness of GENERIC, it is difficult to set it on a firm mathematical ground and define proper dual spaces. Nevertheless, we shall formulate operations with a GENERIC framework in a higher detail which, once understood, can be omitted and the usual notation adopted. We also believe that the reader will be rewarded for this extra effort through quicker mastering of computational skills within GENERIC and relationships among basics of the framework. Given one state variable x with a time evolution in the GENERIC form ̇ =L x(t)
δE δΞ , + δx δx∗
A.5 Manipulations with Poisson brackets |
261
the time derivative of a sufficiently smooth¹ functional A : D → ℂ is defined as d d ̇ ̇ r a )) ϵ=0 A(x(t, r a )) = A(x(t + ϵ, r a )) ϵ=0 = A (x(t, r a ) + ϵ x(t, dϵ dϵ δA δA δΞ δE ̇ r a )) = ( =( , x(t, , (L ) (t, r a ) + ∗ ) δx(t, r a ) δx(t, r a ) δx(t, r b ) δx (t, r a ) δΞ δA , ∗ = {A, E} + ( ) , δx(t, r a ) δx (t, r a ) where the operator L : D → C∞ maps functionals (generalized functions) onto smooth ones (in the sense of Footnote 1 on page 261, i.e., δE/δx can be a generalized function but with a smooth representation in classical functions or can be a limit of a smooth sequence of classical functions) via dependencies on parameters t, r (L
δE δE ̃ r a , rb ), ) (t, r a ) = (L(t, ) (t, r a ) . δx(t, r b ) δx(t, r b )
For more state variables x we can straightforwardly generalize as {A, B} = ∑ ( i
δA δB , (L ) (r a )) , δx i (r a ) δx i
which is typically denoted as ⟨δA/δx, LδB/δx⟩ and where the Poisson bivector action is (LδB/δx)i (r a ) = ∑j (L̃ ij (r a , rb ), δB/δx j (r b )). Let us conclude these general formulations by a finite dimensional model. Consider for example the case of classical mechanics, where interactions are local. The state variables are (q, p), where q (resp. p) are position coordinates (resp. momenta) of a finite number of particles. The time evolution is governed by Hamilton mechanics δE q̇ 0 I δq ( )=( )( ) , δE ṗ −I 0 ⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟ δp
(A.27)
𝕃
where I is the identity operator and E(q, p) is a potential having the physical interpretation of energy. The locality of particle interactions is naturally characterized via ̃ a , rb ) = 𝕃δ(r a − r b ). Consequently, the variational derivative is a classical partial L(r
1 Particularly, we assume that δA/δφ ∈ Dreg with a C ∞ one-to-one corresponding function in L1loc . Note that this rather strict requirement can typically be relaxed by the fact that any generalized function can be approximated (in D convergence) by a sequence of smooth C ∞ functions allowing us to proceed with the assumptions of smooth functionals but checking and evaluating limits in individual cases.
262 | A Mathematical aspects derivative δA/(δx i (r a )) = (∂ x i A)(r a ) and we have {A, B} = ∑ ( i
δA δB , (L ) (r a )) δx i (r a ) δx
= ∑( i
= ∑( i
= ∑( i
δA δB , ∑ (L̃ ij (r a , rb ), ( ) (r b ))) δx i (r a ) j δx δA δB , ∑ (𝕃 ij δ(r a − r b ), ( ) (r b ))) δx i (r a ) j δx δA δB , ∑ (𝕃 ij ( ) (r a ))) . δx i (r a ) j δx
This Poisson bracket indeed recovers Hamilton evolution equations (see page 266 for how to reconstruct evolution equations from a Poisson bracket). Given the reversible part of the evolution, how can one obtain the Poisson bivector? Assume that we have governing equations and we would like to rewrite their reversible part into GENERIC structure, i.e., find the Poisson bivector L characterizing the Poisson bracket {, } (which can be found below). Consider a sufficiently smooth functional A. Then its time evolution is δA rev δA Ȧ = ( , ẋ ) = ( , g k (x)) , δx k k δx k = where we explicitly used the knowledge of the reversible part of evolution, ẋ rev k g k (x). Further, knowledge of energy E as one of the four required building blocks for GENERIC structure provides a relation between the state variables and energy conjugates, x j = h j (δE/δx). As GENERIC suggests (or to be compatible with GENERIC structure of evolution equations), the reversible part has to be linear, and hence g ∘ h has to be linear. Finally, we have δE δA δE δA , (g ∘ h ( )) ) = {A, E} = ( , (L ) ) Ȧ = ( δx k δx k δx k δx k or gk ∘ h (
δE δE δE ) = (g ∘ h ( )) = (L ) . δx δx k δx k
For illustration consider the usual form of continuity equation ρ̇ = −∂ j v j with state variables ρ, v, and δE/δv j = mv j for simplicity. Then g ρ (ρ, v1 , v2 , v3 ) = −∂ j v j ,
h v j (ρ, v1 , v2 , v3 ) = mv j ,
(A.28)
A.5 Manipulations with Poisson brackets | 263
where the reader can see that both g, h are linear and can be represented by matrices via g k (x) = g kj x j , h k (y) = h kj y j . Consequently, the continuity equation can be represented by the following first row of the Poisson bivector L: L ρ,ρ = 0 ,
L ρ,v k = g ρ,j h j,v k = −m∂ k ,
k ∈ {1, 2, 3} .
Given L, how can one obtain the Poisson bracket, L → {, }? Let us now illustrate the above considerations on the particular example of fluid mechanics, where we shall reconstruct Poisson bracket {, } from the knowledge of the tensor L̃ and consequently the evolution equation of state variables (ρ, u, s). Further, we shall proceed in the opposite direction, i.e., from evolution equations reconstruct the Poisson bracket and finally the Poisson bivector L in terms of the tensor L.̃ The reversible part of classical hydrodynamics (or fluid mechanics) is fully described via the tensor L̃ CH describing coupling among state variables (ρ, u, s) [39] ρ(r ),ρ(rb ) L̃ CH a =0,
∂δ(rb − r a ) ρ(r ),u (r ) L̃ CH a j b = ρ(r b ) , j ∂r b
ρ(r ),s(rb ) L̃ CH a =0,
∂δ(rb − r a ) ∂δ(rb − r a ) u (r ),u (r ) L̃ CHi a j b = u i (r b ) − u j (r a ) , j j ∂r b ∂r a ∂δ(rb − r a ) u (r ),s(rb ) L̃ CHi a = −s(r a ) , ∂r ia s(r ),s(rb ) =0. L̃ a
(A.29a) (A.29b) (A.29c) (A.29d)
CH
Note that as L is an antisymmetric operator, L̃ has antisymmetric components as well. The Dirac delta function is denoted as δ and it holds δ(r a − rb ) = δ(r b − r a ) as it is a special case of affine transformation with minus identity matrix (f(Ar + r a ), φ(r)) = 1/| det A|(f(r), φ(A−1 (r) − ra )). To calculate the Poisson bracket we need to calculate the functional derivative of an arbitrary functional A with respect to state variables as defined above and to apply the Poisson bivector. When employing the shorthand notation for functional derivative δA/(δρ(r a )) = A ρ(ra ) , the first part of Poisson bracket is Bρ {A, B}ρ(ra ) = (A ρ(ra ) , (LCH (Bu )) (r a )) Bs ρ ρ(r ),j(rb )
= (A ρ(ra ) , ∑ (L̃ CH a j
= (A ρ(ra ) , (ρ(r b )
B ρ(rb ) , (Bu(rb ) ))) B s(rb )
∂δ(rb − r a ) j
∂r b
, B u j (rb ) ))
264 | A Mathematical aspects
= (A ρ(ra ) , (
∂δ(rb − r a ) j
∂r b
, ρ(r b )B u j (rb ) ))
= (A ρ(ra ) , − (δ(r b − r a ), = (A ρ(ra ) , −
∂ (ρ(r b )B u j (rb ) ) j
∂r b
∂ (ρ(r a )B u j (ra ) ) j ∂r a
))
∂A ρ(ra )
)=(
j
∂r a
, ρ(r a )B u j (ra ) ) .
The second part of the Poisson bracket can be calculated similarly. It consists of three nonzero contributions and we shall calculate them separately for tractability. u j (ra ),ρ(rb ) The contribution due to coupling of momenta and density is (note that L̃ CH = ρ(ra ),u j (rb ) −L̃ due to the antisymmetry) CH
{A, B}u j (ra ),ρ(ra ) = (A u j (ra ) , (LCH B ρ ) (r a )) u (r ),ρ(rb ) , B ρ(rb ) )) = (A u j (ra ) , (L̃ CHj a
= (A u j (ra ) , − (ρ(ra ) = (A u j (ra ) , −ρ(ra ) = (A u j (ra ) , −ρ(ra )
∂δ(rb − r a ) j
∂r a
∂ j
∂r a
, B ρ(rb ) ))
(δ(r b − r a ), B ρ(rb ) ))
∂B ρ(ra ) j
∂r a
) .
The coupling between momenta contributes to the Poisson bracket in the following way: {A, B}u i (ra ),u j (ra ) = (A u i (ra ) , (LCH B u j ) (r a )) u (r ),u j (rb )
= (A u i (ra ) , (L̃ CHi a
= (A u i (ra ) , (u i (r b )
, B u j (rb ) ))
∂δ(rb − r a ) j ∂r b
= (A u i (ra ) , − (δ(r b − r a ), = (A u i (ra ) , − =(
∂A u i (ra ) j ∂r a
∂δ(rb − r a ) j
∂r a
∂ (u i (r b )B u j (rb ) )
∂ (u i (r a )B u j (ra ) ) j ∂r a
− u j (r a )
j ∂r b
− u j (r a )
, B u j (rb ) ))
) − u j (r a )
∂B u j (ra ) j
∂r a
, u i (r a )B u j (ra ) ) − (A u i (ra ) , u j (r a )
∂ j
∂r a
)
∂B u j (ra ) j
∂r a
) .
(δ(r b − r a ), B u j (rb ) ))
A.5 Manipulations with Poisson brackets | 265
The coupling between momenta and entropy is given by {A, B}u i (ra ),s(ra ) = (A u i (ra ) , (LCH B s ) (r a )) u (r ),s(rb ) = (A u i (ra ) , (L̃ CHi a , B s(rb ) ))
= (A u i (ra ) , (−s(r a ) = (A u i (ra ) , −s(ra )
∂δ(rb − r a ) ∂r ia
∂B s(ra ) ∂r ia
, B s(rb ) ))
) .
The contribution to Poisson bracket from coupling entropy with state variables has only one nonzero contribution and that is from coupling with momenta: {A, B} s(ra ),u j (ra ) = (A s(ra ) , (LCH B u j ) (r a )) s(r ),u (r ) = (A s(ra ) , (L̃ CHa j b , B u j (rb ) )) u j (ra ),s(rb )
= (A s(ra ) , − (L̃ CH
= (A s(ra ) , (s(r b ) =(
∂A s(ra ) j
∂r a
, B u j (rb ) ))
∂δ(rb − r a ) j
∂r b
, B u j (rb ) ))
, s(r a )B u j (ra ) ) .
The whole Poisson bracket is then {A, B} = (
∂A ρ(ra )
, ρ(r a )B u j (ra ) ) − (A u j (ra ) , ρ(r a )
∂B ρ(ra )
) j ∂r a ∂B u j (ra ) ∂A u i (ra ) , u i (r a )B u j (ra ) ) − (A u i (ra ) , u j (r a ) ) +( j j ∂r a ∂r a j ∂r a
+(
∂A s(ra ) j ∂r a
, s(r a )B u j (ra ) ) − (A u j (ra ) , s(r a )
∂B s(ra ) j
∂r a
) ,
which is typically written down using the inner product on L2 (because all the functionals are considered regular, Dreg ) as {A, B} = ∫ dra ρ(r a ) [(∂ r j A ρ(ra ) ) B u j (ra ) − A u j (ra ) (∂ r j B ρ(ra ) )] a
a
+ ∫ dr a u i (r a ) [(∂ r j A u i (ra ) ) B u j (ra ) − A u i (ra ) (∂ r j B u j (ra ) )] a
a
+ ∫ dr a s(r a ) [(∂ r j A s(ra ) ) B u j (ra ) − A u j (ra ) (∂ r j B s(ra ) )] . a
a
(A.30)
266 | A Mathematical aspects
Given the Poisson bracket, how can one obtain the reversible part of evolution equations, {, } → ẋrev ? The reversible part of evolution equations can be recovered from the Poisson bracket via time derivative of an arbitrary sufficiently smooth functional A as follows: ̇ A(x(t, r a )) = (
δA , ẋ k (t, r a )) δx k (t, r a ) δΞ δE δA , (L ) (t, r a ) + ∗ ) =( δx k (t, r a ) δx k (t, r b ) δx k (t, r a )
= {A, E} + (
δΞ δA , ) . δx k (t, r a ) δx∗k (t, r a )
Hence the reversible part of evolution equations is (
δA δA δE , ẋ k (t, r a )rev ) = {A, E} = ( , (L ) (r a )) δx k (t, r a ) δx k (r a ) δx k
and due to the arbitrariness of A we may conclude that ẋ k (t, r a )rev = (L
δE ) (r a ) , δx k
thus being easily identified within the Poisson bracket itself as coefficients by variational derivatives of A, by δA/(δx k (r a )). To illustrate this point, consider the Poisson bracket from the fluid mechanics example discussed in the preceding paragraph, (A.30). To obtain the reversible part of ρ̇ one needs to collect the coefficient by δA/(δρ(ra )). Obviously, the relevant terms are only with A ρ and we rewrite {A, E} = ∫ dra ρ(r a ) [(∂ r j A ρ(ra ) ) E u j (ra ) − A u j (ra ) (∂ r j E ρ(ra ) )] + . . . a
a
= ∫ dr a A ρ(ra ) [−∂ r j (ρ(r a )E u j (ra ) )] + . . . , a
yielding the classical continuity equations for the standard choice of energy providing E u j (ra ) = u j (r a )/ρ(r a ). Final remarks We discussed above how to equivalently write all the forms of the reversible part of governing equations by completing the circle ẋ rev → L → {, } → ẋ rev . Additionally, note that one can get the Poisson bivector L directly from the Poisson bracket {, } via the choice A = x l (r a ), B = x k (r b ) as then we have {A, B} = (
δx k (r b ) δx l (r a ) , (L ) (r)) = δ(r a − r)L jk δ(r − r b )δ lj = L lk (r a )δ(r a − r b ) , δx j (r) δx(r ) j
where we used that (δx k (r b ))/(δx j (r )) = δ jk δ(r − r b ) and hence its image under the action of L is (L(δx k (r b ))/(δx(r )))j (r) = L jk δ(r−r b ). Therefore, it suffices to calculate a Poisson bracket of all combinations of state variables to obtain complete information about the action of the Poisson bracket being a consequence of linearity.
Bibliography [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24]
J. Hašek (translated by P. Selver). The Good Soldier Švejk. Doubleday, Co. & Inc., 1930, 1923 (1930 for the English translation). H. B. Callen. Thermodynamics: an introduction to the physical theories of equilibrium thermostatics and irreversible thermodynamics. Wiley, 1960. E. T. Jaynes. Information theory and statistical mechanics. Physical Review, 106(4):620–630, 1957. J. W. Gibbs. The scientific papers of J. Willard Gibbs, volume 1: Thermodynamics. Ox Bow Press, 1993. L. D. Landau and E. M. Lifschitz. Statistical physics. Number pt. 1 in Course of theoretical physics. Pergamon Press, 1969. E. H. Lieb and J. Yngvason. The entropy concept for non-equilibrium states. In Proc. R. Soc. A, volume 469, page 20130408. The Royal Society, 2013. O. Esen and H. Gümral. Tulczyjew’s triplet for Lie groups I: Trivializations and reductions. Journal of Lie Theory, 24:1115–1160, 2014. O. Esen and H. Gümral. Tulczyjew’s triplet for Lie groups ii: Dynamics. ArXiv e-prints, March 2015. H. Le Chatelier. Sur un énoncé général des lois des équilibres chimiques. Comptes-rendus de l’Académie des sciences, 99:786–789, 1884. L. D. Landau and E. M. Lifshitz. Quantum Mechanics: Non-relativistic Theory. Butterworth Heinemann. Butterworth-Heinemann, 1977. C. E. Shannon. A mathematical theory of communication. Bell System Technical Journal, 27:379–423,623–656, 1948. P. Erdös. On the distribution function of additive functions. Annals of Mathematics, 47(1), 1946. M. Planck. Ueber das gesetz der energieverteilung im normalspectrum. Annalen der Physik, 309(3):553–563, 1901. P. Jizba and T. Arimitsu. Generalized statistics: yet another generalization. Physica A: Statistical Mechanics and its Applications, 340(1):110 – 116, 2004. R. P. Kanwal. Generalized functions theory and technique: Theory and technique. Springer Science & Business Media, 2012. M. Grmela, D. Jou, and J. Casas-Vazquez. Radiation hydrodynamics and thermodynamics. J. Non-Equilib. Thermodyn., 23:203–225, 1998. N. van Kampen. Condensation of a classical gas with long-range attraction. Phys. Rev., 135:A362, 1964. M. Grmela. Kinetic approach to phase transitions. J. Stat. Phys., 3:347–364, 1971. Aldo Frezzotti and Paolo Barbante. Kinetic theory aspects of non-equilibrium liquid-vapor flows. Bulletin of the JSME, Mechanical Engineering Reviews, 4(2), 2017. R. Mauri. Non-Equilibrium Thermodynamics in Multiphase Flows. Soft and Biological Matter. Springer Netherlands, 2012. D. Ruelle. Thermodynamic Formalism. Cambridge University Press, 2nd edition, 2010. G. C. Sarti and G. Marrucci. Thermomechanics of dilute polymer solutions: Multiple beadspring model. Chem. Eng. Sci., 28:1053–1059, 1973. P. E. Hydon. Symmetry methods for differential equations: a beginner’s guide, volume 22. Cambridge University Press, 2000. P. J. Olver. Applications of Lie groups to differential equations, volume 107. Springer Science & Business Media, 2000.
https://doi.org/10.1515/9783110350951-009
268 | Bibliography
[25] [26] [27] [28] [29] [30]
[31] [32] [33] [34] [35] [36] [37] [38] [39] [40]
[41]
[42]
[43]
[44] [45]
M. Fecko. Differential Geometry and Lie Groups for Physicists. Cambridge University Press, 2006. V. I. Arnold, K. Vogtmann, and A. Weinstein. Mathematical Methods of Classical Mechanics. Graduate Texts in Mathematics. Springer New York, 2013. O. Esen and Hasan G. Lie algebra of Hamiltonian vector fields and the Poisson-Vlasov equations, 2012. L. D. Landau and E. M. Lifshitz. Mechanics. Butterworth-Heinemann. Butterworth-Heinemann, 1976. D. D. Holm, J. E. Marsden, T. Ratiu, and A. Weinstein. Nonlinear stability of fluid and plasma equilibria. Physics Reports, 123(1 & 2):1–116, 1985. V. I. Arnold. Sur la géometrie différentielle des groupes de Lie de dimension infini et ses applications dans l’hydrodynamique des fluides parfaits. Annales de l’institut Fourier, 16(1):319–361, 1966. J. Marsden and A. Weinstein. The Hamiltonian-structure of the Maxwell-Vlasov equations. Physica D, 4(3):394–406, 1982. S. R. de Groot and P. Mazur. Non-equilibrium Thermodynamics. Dover Publications, New York, 1984. A. Clebsch. Über die Integration der Hydrodynamische Gleichungen. Journal für die reine und angewandte Mathematik, 56:1–10, 1895. W. van Saarloos, D. Bedeaux, and P. Mazur. Hydrodynamics for an ideal fluid: Hamiltonian formalism and Liouville-equation. Physica A, 107:109–125, 1981. M. E. Gurtin. An Introduction to Continuum Mechanics. Mathematics in Science and Engineering. Elsevier Science, 1982. J. E. Marsden and A. Weinstein. Coadjoint orbits, vortices and Clebsch variables for incompressible fluids. Physica D, 7:305–323, 1983. M. Grmela. A framework for elasto-plastic hydrodynamics. Physics letters A, 312:134–146, 2003. O. Esen, M. Pavelka, and M. Grmela. Hamiltonian coupling of electromagnetic field and matter. Int J Adv Eng Sci Appl Math, 2016. M. Pavelka, V. Klika, O. Esen, and M. Grmela. A hierarchy of Poisson brackets in nonequilibrium thermodynamics. Physica D: Nonlinear Phenomena, 335:54–69, nov 2016. S. Godunov, T. Mikhailova, and E. Romenskii. Systems of thermodynamically coordinated laws of conservation invariant under rotations. Siberian Mathematical Journal, 37(4):690– 705, 1996. S. K. Godunov and E. Romensky. Computational Fluid Dynamics Review, chapter Thermodynamics, conservation laws and symmetric forms of differential equations in mechanics of continuous media, pages 19–31. Wiley: New York, NY, USA, 1995. S. K. Godunov and I. M. Peshkov. Thermodynamically consistent nonlinear model of elastoplastic Maxwell medium. Computational Mathematics and Mathematical Physics, 50(8):1409–1426, 2010. I. Peshkov, M. Pavelka, E. Romenski, and M. Grmela. Continuum mechanics and thermodynamics in the Hamilton and the Godunov-type formulations. Continuum Mechanics and Thermodynamics, 2018. M. Kroeger and M. Huetter. Automated symbolic calculations in nonequilibrium thermodynamics. Comput. Phys. Commun., 181:2149–2157, 2010. M. Hütter and T. A. Tervoort. Finite anisotropic elasticity and material frame indifference from a nonequilibrium thermodynamics perspective. J. Non-Newtonian Fluid Mech., 152(45–52), 2008.
Bibliography
[46]
[47] [48] [49] [50]
[51]
[52]
[53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69]
| 269
M. Dumbser, I. Peshkov, E. Romenski, and O. Zanotti. High order ader schemes for a unified first order hyperbolic formulation of continuum mechanics: Viscous heat-conducting fluids and elastic solids. Journal of Computational Physics, 314:824–862, 2016. M. Grmela and H. C. Öttinger. Dynamics and thermodynamics of complex fluids. i. development of a general formalism. Phys. Rev. E, 56:6620–6632, Dec 1997. H. C. Öttinger and M. Grmela. Dynamics and thermodynamics of complex fluids. ii. illustrations of a general formalism. Phys. Rev. E, 56:6633–6655, Dec 1997. K. R. Rajagopal and A. R. Srinivasa. A thermodynamic frame work for rate type fluid models. J. Non-Newton. Fluid Mech., 88(3):207–227, 2000. J. Málek and V. Pruša. Derivation of equations for continuum mechanics and thermodynamics of fluids. In Y Giga and A Novotný, editors, Handbook of Mathematical Analysis in Mechanics of Viscous Fluids, pages 1–70. Springer, 2017. J. Hron, V. Miloš, V. Průša, O. Souček, and K. Tůma. On thermodynamics of viscoelastic rate type fluids with temperature dependent material coefficients. Int. J. Non-Linear Mech., 95:193–208, 2017. L. A. Mihai and A. Goriely. How to characterize a nonlinear elastic material? a review on nonlinear constitutive parameters in isotropic finite elasticity. Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences, 473(2207), 2017. L. D. Landau, E. M. Lifshitz, A. M. Kosevich, and L. P. Pitaevskii. Theory of Elasticity. Course of theoretical physics. Butterworth-Heinemann, 1986. S. Perkowitz. Phonon, Jan 2018. I. Müller and T. Ruggeri. Rational extended thermodynamics. Springer tracts in natural philosophy. Springer, 1998. M. Grmela, G. Lebon, and C. Dubois. Multiscale thermodynamics and mechanics of heat. Phys. Rev. E, 83:061134, Jun 2011. J. M. Maxwell. A treatise on Electricity and Magnetism, volume I. Clarendon Press, Oxford, 1873. L. D. Landau and E. M. Lifshitz. The Classical Theory of Fields. Number v. 2 in Course of theoretical physics. Butterworth Heinemann, 1975. D. D. Holm. Hamiltonian dynamics of a charged fluid, including electro-and magnetohydrodynamics. Physics Letters A, 114(3):137–141, 1986. L. D. Landau, J. S. Bell, J. Kearsley, L. P. Pitaevskii, E. M. Lifshitz, and J. B. Sykes. Electrodynamics of Continuous Media. COURSE OF THEORETICAL PHYSICS. Elsevier Science, 1984. M. Pavelka, V. Klika, and M. Grmela. Time reversal in nonequilibrium thermodynamics. Phys. Rev. E, 90(062131), 2014. C. Mouhot and C. Villani. On Landau damping. Acta Mathematica, 207(1):29–201, 2011. C. Villani. Particle systems and nonlinear Landau damping. Physics of plasmas, 21(3), MAR 2014. L. Landau. On the vibrations of the electronic plasma. Zhurnal eksperimentalnoi i teoreticheskoi fiziki, 16(7):574–586, 1946. L. P. Pitaevskii and E. M. Lifshitz. Physical Kinetics. Number v. 10. Elsevier Science, 2012. M. Pavelka, V. Klika, and M. Grmela. Statistical mechanics of landau damping. Physica A, Submitted, 2018. M. Grmela and M. Pavelka. Landau damping in the multiscale Vlasov theory. Kinetic and Related Models, 11(3):521–545, 2018. T. Roubíček. Nonlinear Partial Differential Equations with Applications. Birkhäuser, 2005. H. C. Öttinger. Beyond Equilibrium Thermodynamics. Wiley, 2005.
270 | Bibliography
[70]
[71]
[72] [73]
[74]
[75]
[76] [77]
[78]
[79] [80] [81]
[82] [83] [84] [85] [86] [87] [88] [89]
A. Mielke, D. R. M. Renger, and M. A. Peletier. A generalization of Onsager’s reciprocity relations to gradient flows with nonlinear mobility. Journal of Non-equilibrium Thermodynamics, 41(2), 2016. A. Mielke, M. A. Peletier, and D. R. M. Renger. On the relation between gradient flows and the large-deviation principle, with applications to Markov chains and diffusion. Potential Analysis, 41(4):1293–1327, 2014. A. N. Beris and B. J. Edwards. Thermodynamics of Flowing Systems. Oxford Univ. Press, Oxford, UK, 1994. K. Tůma, S. Stupkiewicz, and H. Petryk. Size effects in martensitic microstructures: finitestrain phase field model versus sharp-interface approach. J. Mech. Phys. Solids, 95:284–307, 2016. H. Ziegler. Some extremum principles in irreversible thermodynamics with application to continuum mechanics. In Progress in Solid Mechanics, Vol. IV, pages 91–193. North-Holland, Amsterdam, 1963. K. R. Rajagopal and A. R. Srinivasa. On thermomechanical restrictions of continua. Proceedings of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences, 460(2042):631–651, 2004. J. Málek, K. R. Rajagopal, and K. Tůma. A thermodynamically compatible model for describing the response of asphalt binders. Int. J. Pavement Eng., 16(4):297–314, 2015. J. Hron, J. Kratochvíl, J. Málek, K. R. Rajagopal, and K. Tůma. A thermodynamically compatible rate type fluid to describe the response of asphalt. Math. Comput. Simul., 82(10):1853–1873, 2012. G. P. Beretta. Steepest entropy ascent model for far-nonequilibrium thermodynamics: Unified implementation of the maximum entropy production principle. Phys. Rev. E, 90:042113, Oct 2014. A. Janečka and M. Pavelka. Gradient dynamics and entropy production maximization. Journal of Non-equilibrium Thermodynamics, 43(1):1–19, 2018. M. Grmela, V. Klika, and M. Pavelka. Reductions and extensions in mesoscopic dynamics. Phys. Rev. E, 92(032111), 2015. M. Hütter and B. Svendsen. Quasi-linear versus potential-based formulations of force–flux relations and the generic for irreversible processes: comparisons and examples. Continuum Mechanics and Thermodynamics, 25(6):803–816, 2013. M. Grmela. Generic guide to the multiscale dynamics and thermodynamics. Journal of Physics Communications, 2(032001), 2018. I. E. Dzyaloshinskii and G. E. Volovick. Poisson brackets in condense matter physics. Ann. Phys., 125:67–97, 1980. M. Grmela. Particle and bracket formulations of kinetic equations. Contemp. Math., 28:125– 132, 1984. A. N. Kaufman. Dissipative Hamiltonian systems: A unifying principle. Phys. Lett. A, 100:419, 1984. P. J. Morrison. Bracket formulation for irreversible classical fields. Phys. Lett. A, 100:423, 1984. V. L. Ginzburg and L. D. Landau. On the theory of superconductivity. Zhur. Eksp. Theor. Fiz., 20:1064–1082, 1950. J. W. Cahn and J. E. Hilliard. Free energy of a nonuniform system. interfacial free energy. J. Chem. Phys. 1958, page 258, 1958. L. Onsager. Reciprocal relations in irreversible processes. I. Phys. Rev., 37:405–426, Feb 1931.
Bibliography | 271
[90] [91] [92] [93]
[94] [95]
[96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114]
L. Onsager. Reciprocal relations in irreversible processes. ii. Phys. Rev., 38:2265–2279, Dec 1931. H. B. G. Casimir. On onsager’s principle of microscopic reversibility. Rev. Mod. Phys., 17:343– 350, Apr 1945. A. N. Gorban, I. V. Karlin, H. C. Öttinger, and L. L. Tatarinova. Ehrenfest’s argument extended to a formalism of nonequilibrium thermodynamics. Physical Review E, 63(066124), 2001. I. V. Karlin, L. L. Tatarinova, A. N. Gorban, and H. C. Öttinger. Irreversibility in the short memory approximation. Physica A: Statistical Mechanics and its Applications, 327(3-4):399–424, 2003. D. Jou, J. Casas-Vázquez, and G. Lebon. Extended Irreversible Thermodynamics. SpringerVerlag, New York, 4th edition, 2010. G. Lebon, D. Jou, and J. C. Vázquez. Understanding Non-Equilibrium Thermodynamics: Foundations, Applications, Frontiers. SpringerLink: Springer e-Books. Springer London, Limited, 2008. J. Marsden and A. Weinstein. Coadjoint orbits, vortices, and clebsch variables for incompressible fluids. PHYSICA D, 7(1-3):305–323, 1983. O. Esen and S. Sütlü. Lagrangian dynamics on matched pairs. Journal of Geometry and Physics, 111:142–157, 2017. O. Esen and S. Sütlü. Hamiltonian dynamics on matched pairs. International Journal of Geometric Methods in Modern Physics, 13(10), 2016. H. C.Öttinger. Stochastic Processes in Polymeric Fluids - Tools and Examples for eveloping Simulation Algorithms. Springer, Berlin, 1996. A. Mielke. A gradient structure for reaction-diffusion systems and for energy-drift-diffusion systems. Nonlinearity, 24:1329–1346, 2011. J. M. Rubi and P. Mazur. Nonequilibrium thermodynamics of hydrodynamic fluctuations. Phys. A, 276:477–488, 2000. D. Reguera, J. M. Rubi, and J. M. G. Vilar. The mesoscopic dynamics of thermodynamic systems. J. Phys. Chem. B, 109:21502–21515, 2015. J. M. Rubi. Mesoscopic thermodynamics. Phys. Scr., T151(014027), 2012. J. M. Ortiz de Zárate and J. V. Sengers. Hydrodynamic Fluctuations in Fluids and Fluid Mixtures. Elsevier, 2006. H. C. Öttinger. GENERIC: Review of successful applications and a challenge for the future. Talk at 14th Joint European Thermodynamics Conference - May 21-25 Budapest, 2017. J. G. Kirkwood. The statistical mechanical theory of transport processes I. General theory. J. Chem. Phys., 14:180, 1946. J. G. Kirkwood. The statistical mechanical theory of transport processes II. Transport in gases. J. Chem. Phys., 15:72, 1947. R. B. Bird, C. F. Curtiss, R. C. Armstrong, and O. Hassager. Dynamics of Polymeric Liquids, Volume 2: Kinetic Theory. Wiley, 1987. C. Eckart. The thermodynamics of irreversible processes I-III. Phys. Rev., 58:267, 1940. G. A. Maugin and W. Muschik. Thermodynamics with internal variables, I,II. J. Non-Equilib. Thermodyn., 19:217–289, 1994. A. Berezovski and P. Ván. Internal Variables in Thermoelasticity. Solid Mechanics and Its Applications. Springer International Publishing, 2017. E. Cosserat and T. Cosserat. Théorie de Corps déformables. Paris: A. Hermann et Fils, 1909. J. Ross and P. Mazur. Some deductions from a formal statistical mechanical theory of chemical kinetics. J. Chem. Phys., 35:19–28, 1961. T. Ruggeri and M. Sugiyama. Rational Extended Thermodynamics Beyond the Monoatomic Gas. Springer, Heidelberg, 2015.
272 | Bibliography
[115] J. M. Rubi and S. Kjelstrup. Mesoscopic nonequilibrium thermodynamics gives the same thermodynamic basis to Butler-Volmer and Nernst equations. J. Phys. Chem. B, 107:13471– 13477, 2003. [116] P. G. De Gennes. Reptation of a polymer chain in the presence of fixed obstacles. J Chem Phys, 55:572–579, 1971. [117] H. C. Öttinger. A thermodynamically admissible reptation model for fast flows of entangled polymers. J Rheol, 43:1461–1493, 1999. [118] H. Eslami and M.Grmela. Mesoscopic formulation of reptation. Rheol. Acta, 47:399–415, 2008. [119] I. Müller and T. Ruggeri. Rational Extended Thermodynamics. Springer, New York, 2nd edition, 1998. [120] M. Grmela, L. Hong, D. Jou, G. Lebon, and M. Pavelka. Hamiltonian and godunov structures of the grad hierarchy. Physical Review E, 95(033121), 2017. [121] J. O. Hirschfelder, C. F. Curtiss, R. B. Bird, and University of Wisconsin. Theoretical Chemistry Laboratory. Molecular theory of gases and liquids. Structure of matter series. Wiley, 1954. [122] H. Grad. Principles of kinetic theory of gases. In Handbuch der Physik, volume 12. Springer, Berlin, 1958. [123] M. Grmela. Contact Geometry of Mesoscopic Thermodynamics and Dynamics. Entropy, 16(3):1652–1686, MAR 2014. [124] P. Ván, M. Pavelka, and M. Grmela. Extra mass flux in fluid mechanics. Journal of NonEquilibrium Thermodynamics, 42(2), 2017. [125] L. Euler. Principes généraux du mouvement des fluides. Académie Royale des Sciences et des Belles-Lettres de Berlin, Mémories 11, 1755. English translation in Physica D 237, 1825 (2008). [126] K. R. Rajagopal and A. R. Srinivasa. A thermodynamic framework for rate type fluid models. J. Non-Newtonian Fluid Mech., 88:207–227, 2000. [127] J. Málek, K. R. Rajagopal, and K. Tůma. On the variant of the Maxwell and Oldroyd-B models with the context of a thermodynamic basis. Int. J. Non-Linear Mech., 76:42–47, 2015. [128] V. Průša and K. R. Rajagopal. On models of viscoelastic materials that are mechanically incompressible and thermally compressible or expansible and their Oerbeck-Boussinesq type approaximations. Mat. Models Meth. Appl. Sci., 23:1761–1794, 2013. [129] M. Grmela. Hamiltonian dynamics of incompressible elastic fluids. Phys. Letters A, 130:81– 86, 1988. [130] M. Grmela. Multiscale equilibrium and nonequilibrium thermodynamics in chemical engineering. Advances in Chemical Engineering, 39:75–129, 2010. [131] H. C. Öttinger. Generic: Review of successful applications and a challenge for the future. 14th Joint European Thermodynamics Conference - May 21-25 Budapest, 2017. [132] M. Grmela, D. Jou, J. Casas-Vazquez, M. Bousmina, and G. Lebon. Ensemble averaging in turbulence modelling. Physics Letters A, 330(1-2):54–64, SEP 13 2004. [133] M. Grmela. Weakly nonlocal hydrodynamics. Physical review E, 47(1), 1993. [134] S. K. Godunov, A. A. Deribas, A. V. Zabrodin, and N. S. Kozin. Hydrodynamic effects in colliding solids. Journal of Computational Physics, 5(3):517–539, 1970. [135] M. L. Wilkins. Calculation of elastic-plastic flow. California Univ. Livermore Radiation LAB, 1963. [136] S. K. Godunov and E. I. Romenskii. Nonstationary equations of nonlinear elasticity theory in Eulerian coordinates. Journal of Applied Mechanics and Technical Physics, 13(6):868–884, 1972. [137] E. I. Romenskii. Hypoelastic form of equations in nonlinear elasticity theory. Journal of Applied Mechanics and Technical Physics, 15(2):255–259, 1974.
Bibliography
| 273
[138] S. K. Godunov and N. S. Kozin. Shock structure in a viscoelastic medium with a nonlinear dependence of the Maxwellian viscosity on the parameters of the material. Journal of Applied Mechanics and Technical Physics, 15(5):666–671, 1974. [139] S. K. Godunov, A. F. Demchuk, N. S. Kozin, and V. I. Mali. Interpolation formulas for Maxwell viscosity of certain metals as a function of shear-strain intensity and temperature. Journal of Applied Mechanics and Technical Physics, 15(4):526–529, 1974. [140] S. K. Godunov, V. V. Denisenko, N. S. Kozin, and N. K. Kuz’mina. Use of relaxation viscoelastic model in calculating uniaxial homogeneous strains and refining the interpolation equations for Maxwellian viscosity. Journal of Applied Mechanics and Technical Physics, 16(5):811–814, 1975. [141] S. K. Godunov. An interesting class of quasilinear systems. Dokl. Akad. Nauk SSSR, 139(3):521–523, 1961. [142] G. Boillat. Sur l’existence et la recherche d’équations de conservation supplément aires pour les systémes hyperboliques. C. R. Acad. Sc. Paris, Sér A, 278, 1974. [143] S. K. Godunov. Symmetric form of the magnetohydrodynamic equation. Numerical Methods for Mechanics of Continuum Medium, 3(1):26–34, 1972. [144] E. I. Romenskii. Conservation laws and the symmetric form of equations of nonlinear elasticity theory (in Russian). Boundary Value Problems for Partial Differential Equations, Proc. Sobolev Sem., Akad. Nauk USSR, 1:132–143, 1984. [145] S. K. Godunov and E. I. Romenskii. Elements of continuum mechanics and conservation laws. Kluwer Academic/Plenum Publishers, 2003. [146] I. Peshkov and E. Romenski. A hyperbolic model for viscous Newtonian flows. Continuum Mech. Thermodyn., 28:85–104, 2016. [147] I. Peshkov, E. Romenski, and M. Dumbser. A unified hyperbolic formulation for viscous fluids and elastoplastic solids. arXiv:1705.02151 [physics.flu-dyn], 2017. [148] F. Maršík. Termodynamika kontinua. Academia, Prague, 1999. [149] K. B. Wolf and G. Krötzch. Geometry and dynamics of refracting systems. Eur. J. Phys., 16:14, 1995. [150] D. Mihalas and M. B. Weibel. Foundations of Radiation Hydrodynamics. Oxford UP., New York, 1984. [151] G. C. Pomraning. The Equations of Radiation Hydrodynamics. Pergamon, New York, 1973. [152] G. M. Kremer and I. Müller. Radiation thermodynamics. J. Math. Phys., 33:2265, 1992. [153] A. M. Anile, S. Pennisi, and M. Sanmartino. A thermodynamic approach to eddington factors. J. Mat. Phys., 32:544, 1991. [154] B. J. Edwards, M. Dressler, M. Grmela, and A. Ait-kadi. Rheological models with microstructural constraints. Rheol. Acta, 42:64–75, 2003. [155] M. Grmela and P. G. Lafleur. Kinetic theory and hydrodynamics of rigid body fluids. J. Chem. Phys., 109:6995–6972, 1998. [156] G. B. Jeffery. The motion of ellipsoidal particles immersed in a viscous fluid. Proc. Roy. Soc. Lond. Ser. A, 102:161–179, 1922. [157] F. F. Chen. Introduction to Plasma Physics. Springer US, 2012. [158] J. Meixner. Zur Thermodynamik der irreversiblen Prozesse in Gasen mit chemisch reagierenden, dissoziierenden und anregbaren Komponenten. Annalen der Physik, 43(5):244–270, 1943. [159] J. Meixner and H. G. Reik. Thermodynamik der Irreversible Prozesse, in Handbuch der Physik, volume 3/II. Springer, Berlin Heidelberg New York, 1959. [160] S. Kjelstrup and D. Bedeaux. Non-Equilibrium Thermodynamics of Heterogeneous Systems. Series on Advances in Statistical Mechanics. World Scientific, 2008.
274 | Bibliography
[161] C. M. Guldberg and P. Waage. Concerning chemical affinity. Erdmann’s Journal für Practische Chemie, 127(69-114), 1879. [162] T. de Donder and P. van Rysselberghe. Thermodynamic theory of affinity. In A Book of Principles. Stanford Univ. Press, 1936. [163] M. Feinberg. On chemical kinetics of certain class. Arch. Ration. Mech. Anal., 46:1–41, 1972. [164] S. Sieniutycz. From a least action principle to mass action law and extended affinity. Chem. Eng. Sci., 42:2697–2711, 1987. [165] G. S. Yablonskii, V. I. Bykov, A. N. Gorban, and V. I. Elokhin. Kinetic models of catalytic reactions. In R. Compton, editor, Comprehensive Chemical Kinetics, volume 32, page 392. Elsevier, Amsterdam, 1991. [166] M. Grmela. Thermodynamics of driven systems. Phys. Rev. E, 48:919–930, 1993. [167] A. N. Gorban and I. V. Karlin. Invariant Manifolds for Physical and Chemical Kinetics. Lecture Notes in Physics. Springer, 2005. [168] M. Pavelka, V. Klika, P. Vágner, and F. Maršík. Generalization of exergy analysis. Applied Energy, 137(0):158 – 172, 2015. [169] V. Klika and M. Grmela. Coupling between chemical kinetics and mechanics that is both nonlinear and compatible with thermodynamics. Phys. Rev. E, 87:012141, Jan 2013. [170] A. Bravetti, H. Cruz, and D. Tapias. Contact Hamiltonian mechanics. Annals of Physics, 376:17–39, 2017. [171] F. Weinhold. Metric geometry of equilibrium thermodynamics i-iv. J. Chem. Phys., 63:2479– 2501, 1975. [172] R. Hermann. Geometry, Physics and Systems. Marcel Dekker: New York, NY, USA, 1984. [173] M. Grmela. Thermodynamical lift of the nonlinear Onsager-Casimir vector field. In Proceedings of the Workshop on Hamiltonian Systems, Transformation Groups and Spectral Transform Methods, Université de Montréal, Montréal, QC, Canada, pages 199–207, 1990. [174] M. Grmela. Geometry of mesoscopic nonequilibrium thermodynamics. Entropy, 17:5938– 5964, 2015. [175] G. Ruppeiner. Thermodynamics: A Riemanian geometric model. Phys. Rev. A, 20:1608, 1979. [176] R. Mrugala, J. D. Nulton, J. C. Schoen, and P. Salamon. Statistical approach to the geometric structure of thermodynamics. Phys. Rev. A, 41:3156–3160, 1990. [177] A. Bravetti, C. S. Lopez-Monsalvo, and F. Nettel. Conformal gauge transformations in thermodynamics. Entropy, 17:6150–6168, 2015. [178] V. S. Vladimirov and G. Yankovsky. Generalized Functions in Mathematical Physics. USSR, 1979. [179] I. M. Gelfand and N. I. Vilenkine. Generalized Functions: Applications of harmonic analysis. Applications of Harmonic Analysis. Academic Press, 1964. [180] C. K. Raju. Products and compositions with the dirac delta function. Journal of Physics A: Mathematical and General, 15(2):381, 1982. [181] J.-F. Colombeau. Multiplication of distributions. Bulletin of the American Mathematical Society, 23(2):251–268, 1990. [182] V. Průša, M. Řehoř, and K. Tůma. Colombeau algebra as a mathematical tool for investigating step load and step deformation of systems of nonlinear springs and dashpots. Z. angew. Math. Phys., 68(1):1–13, 2017.
Index A action – adjoint 66 – coadjoint 67 – variational principle 55 angular momentum 70 antisymmetry 60 B Boltzmann constant 24 Boltzmann equation 77, 169 boundary conditions 74 Braun–Le Chatelier principle 18 Burgers tensor 190 C canonical transformation 55 Casimir functionals 59, 67, 75, 78 Cauchy stress – distortion matrix 96 – Maxwell model 103 – Newtonian 145, 166, 184 charge density 111 – bounded 115 chemical potential 210 chemical reactions 228 – rate 229 – with inertia 233 classical irreversible thermodynamics (CIT) 133, 207 Clebsch variables 88 collision kernel 145 collisions 145, 167, 218 commutator of vector fields 66 conformation tensor 48, 100, 102, 179 conjugate variables – as derivatives of thermodynamic potential 136 – energetic 139 – entropic 133 conservation of energy 59 conserved quantities 65 constitutive relation 157 contact geometry – 1-form 248 – contact Hamiltonian vector field 248 – contact structure 244 https://doi.org/10.1515/9783110350951-010
– Hamiltonian 246 – Poisson bracket 245 continuum mechanics 93, 95 – compatibility conditions 190 contravariant 62 convexity 11 correlations 179 cotangent bundle 64 covariant 62 D deformation gradient 92, 94 delta distributions 257 derivative – functional 251 – partial 80, 251 – variational 252 dislocations 190 dissipation 131 dissipation potential 133 – Boltzmann collision integral 145 – conjugate 138 – energetic representation 141 – exponential 230 – fluctuations 159 – for conformation tensor 182 – for Navier–Stokes 144 – friction and temperature equilibration 221 – local (algebraic) 142 – weakly nonlocal 142 dissipative bracket 135 dissipative matrix 135 distortion matrix 94, 189 distribution – Boltzmann 29 – Bose–Einstein 32 – canonical 28 – Fermi–Dirac 32 – grand canonical 31 – microcanonical 27 – Planck 39 distribution function – binary Liouville 212 – entropic moments 173 – moments 171 – N-particle 33, 72
276 | Index
– one-and-two 176 – one-particle 33, 76 – two-particle 48 distributions 253 dumbbell 102 dumbbells 47 E elasticity 100 – Hookean 101 – neo-Hookean 101 electric displacement field 106 – constraint 107, 111, 235 electric intensity 107 electrochemical potential 239 electrohydrodynamics (EHD) 123 electromagnetic stress tensor 117 electromagnetohydrodynamics (EMHD) 112 electrostatic potential 114, 237 energetic representation 6, 139 energy – elastic 99 – electromagnetic 107 – of photons 38 enthalpy 13 entropic representation 6 entropy 21 – binary Boltzmann 206 – binary CIT mixture of ideal gases 209 – binary hydrodynamic (for ideal gases) 207 – binary Liouville 201 – Boltzmann 35, 78 – conjugate 27 – equilibrium of binary ideal mixtures 211 – Liouville 33, 75 – microcanonical 28 – of dumbbell suspension 50 – of ideal fluid 36 – of ideal gases 37 – of mixing 209 – of photons 38 – of rotating rigid body 71 – Reynolds stress 185 – Shannon 24 – two-particle Liouville 48 – van der Waals 41 entropy flux 105 – conjugate 105
entropy production 137, 141 – maximization 138 equation of state – of ideal gas 37 – van der Waals 41 equilibrium thermodynamics 3 Euler equations 81 Eulerian configuration 90 Extended Irreversible Thermodynamics (EIT) 162 extension 157 – Grad 161 – Kirkwood 160 – Langevin 158 extensive variables 6 F Fick’s law 239 first law of thermodynamics 7 fluctuation-dissipation theorem 160 fluctuations 159 fluid mechanics 78 fluids – complex 177 – simple 177 Fokker–Planck equation 160 Fourier’s law 164 Frechet derivative 252 friction 218, 237 fundamental thermodynamic relation 5, 245 G GENERIC 147, 246 – with fluctuations 159 Gibbs free energy 12 Gibbs manifold 6, 243 Gibbs relation 5 Gibbs–Duhem relation 7, 82 Gibbs–Legendre manifold (GL) 244 Godunov–Boilat theorem 189 Grad hierarchy 171 – entropic 173 gradient dynamics 133, 147, 247 – with temperature prefactor 135 group SO(3) 69 Guldberg–Waage kinetics 228 H Hamiltonian 53 Hamiltonian evolution 58, 147 – self-regularization 156
Index | 277
heat 7, 103, 162 – flux 105 – Fourier law 143 – Fourier’s law 164 heat capacity 13 heat conductivity 164 heat of reaction 17 Helmholtz free energy 10, 136 homogeneous system 6 hyperbolic equations – symmetric thermodynamically consistent (SHTC) 188 I incompressibility 166 indistinguishable particles 32 infinitesimal rotation 69 information 22 intensity – electric 107 intensive variables 6 internal variables 161 irreversible evolution 126, 133 – algebraic 141 – condition 135 – energetic representation 141 – friction and temperature equilibration 222 – in mixtures 218 – isothermal 136 – quasilinear 139 J Jacobi formula 102 Jacobi identity 54, 60, 68, 76 – conditional 94 Jeffery equation 199 K kinetic electrodynamics (KED) 109 kinetic theory 167 – BBGKY hierarchy 167 – two-particle 176 Korteweg stress 84 L labels 90 Lagrangian 55 Lagrangian configuration 90 Landau damping 132
Landau notation 251 law of mass action 228 left Cauchy–Green tensor (LCG) 97, 164, 189 Legendre manifold 248 Legendre transformation 11, 26, 243, 254 Leibniz rule 60 level of description 9, 75, 131 – binary Boltzmann 213 – binary electrohydrodynamics (EHD2) 241 – binary electromagnetohydrodynamics (EMHD’2) 235 – binary fluid mechanics 214, 218 – binary kinetic electrodynamics (KED2) 234 – binary magnetohydrodynamics (MHD2) 241 – CIT 216 – classical binary electromagnetohydrodynamics (CEMHD2) 239 – classical irreversible thermodynamics (CIT) 207 – equilibrium for mixtures 211 – higher 150 – lower 150 – mechanical equilibrium 210, 227, 239 Lie algebra 65, 93 Lie algebra dual 67, 93 Lie bracket 65 Lie derivative 63 Lie group 66 Lie–Poisson bracket 75 Liouville equation 74 local thermodynamic equilibrium 82 Lorentz force 109, 234 Lyapunov function 148 M magnetic field 106 – constraint 107 magnetic intensity 107 magnetization 115 magnetohydrodynamics (MHD) 122 matched pairs 158 MaxEnt 25, 131, 154, 243 maximum work 17 Maxwell equations 106, 234 Maxwell model 103, 181, 183 Maxwell relations 13 Maxwell–Onsager reciprocal relations 138 Maxwell–Stefan diffusion 227
278 | Index
mean-field energy 77 Meyer relation 14 mixture – charged 233 – multi-temperature 216, 218 – ternary 223 mixtures 201 mole fraction 209 momentum – of electromagnetic field 116 – of electromagnetic field and matter 239 – of particle in electromagnetic field 108 – of phonons 103 N Navier–Stokes 143, 166, 184, 187, 189 Newton’s laws 53 Noether’s theorem 57 O occupation numbers 32 Ohm’s law 238 Onsager–Casimir reciprocal relations – classical 149 – generalized 150 P parity 125 – of mass, energy and entropy 129 – splitting evolution equations 130 particle – damped in external force field 151, 156 – in electromagnetic field 108 passive advection 91 permeability – relative 115 permittivity – relative 115 phase transitions 40 phonons 103, 162 Planck constant 33 plasticity 188 Poisson bivector 53, 84 Poisson bracket 60 – binary Boltzmann 214 – binary fluid mechanics 215 – binary kinetic electrodynamics 234 – binary Liouville 212 – Boltzmann 77
– canonical 54, 88 – Cattaneo 104 – CIT for binary mixtures 217 – classical binary electromagnetohydrodynamics (CEMHD2) 240 – Clebsch 88 – conformation tensor 180 – contact 245 – distortion matrix 95 – dots 79 – electrohydrodynamic (EHD) 123 – electromagnetohydrodynamic (EMHD) 120 – electromagnetohydrodynamic (EMHD’) 113 – extension 95 – fluctuations 159 – left Cauchy–Green tensor 99 – Lie–Poisson 67 – Lin 92 – Liouville 74 – magnetohydrodynamic (MHD) 122 – nonlocal vorticity 187 – of binary electromagnetohydrodynamics (EMHD’2) 236 – of classical binary electrohydrodynamics (CEHD2) 241 – of classical binary magnetohydrodynamics (CMHD2) 241 – of classical mechanics 54 – of electromagnetic field 107 – of kinetic electrodynamics 110 – projection 75 – Reynolds stress 184 Poisson equation 114, 237 polarization 115 pressure – generalized 95 – hydrodynamic 82 principle of maximum entropy see MaxEnt pull-back 63 R Rational Extended Thermodynamics (RET) 162 reduced evolution 131 reducing evolution 131 reduction 150, 175 – dynamic MaxEnt 152, 162, 166, 183, 187, 238 – Ehrenfest 153
Index | 279
representation – energetic 182 – entropic 133, 181 reversible evolution 126 – condition 129 Reynolds stress 179, 184 rheology 178 rigid body 69 S Sackur–Tetrode relation 37 – binary 211 second law of thermodynamics 7, 131 – origin 133 semidirect product 93, 158 Shannon entropy 24 steepest entropy ascent (SEA) 138 strain energy density 100 – Hookean 101 – neo-Hookean 101 symplectic geometry 249 T tangent bundle 64 temperature 9, 30 – equilibration 220
tensor field 62 thermodynamic force 19 thermodynamic forces and fluxes 137 thermodynamic potential 10, 245 – fluctuations 159 time reversal transformation (TRT) 125 Tower of Babel 1 U upper-convected time derivative 99 V vacuum 107 – permeability 107 – permittivity 107 variational principle 54, 88 vector field 61 – Hamiltonian 64 vector potential 106 viscosity 144, 166, 184, 187 Vlasov equation 77 vorticity 179 W weakly nonlocal energy 83 work 7