W5 Double Pendulum Clock Plan Horology
One of the most precise clock ever created in the world. Full Ocr , Big File , Big drawings , Register to AWS , Amazon W
1,252 134 32MB
English Pages 111 Year 2019
Polecaj historie
![D W5 Free Pendulum Clock Plan Plans - Horology [2]](https://dokumen.pub/img/200x200/d-w5-free-pendulum-clock-plan-plans-horology-2.jpg)


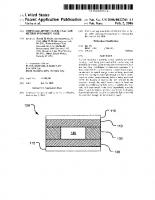




Table of contents :
A Fresh Look at W5......Page 1
Countwheel......Page 4
Feb page 1......Page 5
Feb page 2......Page 6
Feb page 3......Page 7
Feb page 4......Page 8
free pendulum spring assembly......Page 9
HJ cover update......Page 10
HJ Series summary......Page 11
Jan page 1......Page 12
Jan page 2......Page 13
Jan page 3......Page 14
Jan page 4......Page 15
maintain assembly......Page 16
Maintain section......Page 17
works......Page 18
Scans of original sketches provided by Philip Woodward......Page 19
signal box explode......Page 31
THREAD-equiv......Page 32
W5 above left......Page 33
W5 above right......Page 34
W5 Drawing corrections 03-4......Page 35
W5 Drawing corrections......Page 36
W5 escapement......Page 37
W5 Instructions......Page 38
W5 part 1 02-5......Page 46
W5 part 2 03-1......Page 58
W5 part 3 03-2......Page 65
W5 part 4 03-3......Page 75
W5 supplementary info......Page 87
whole clock (1)......Page 90
whole clock......Page 91
woodward drawing 1......Page 92
woodward drawing 2......Page 93
woodward drawing 3......Page 94
woodward drawing 4......Page 95
woodward drawing 5......Page 96
woodward drawing 6......Page 97
woodward drawing 7......Page 98
woodward drawing 8......Page 99
woodward drawing 9......Page 100
woodward drawing 10......Page 101
woodward drawing 11......Page 102
woodward drawing 12......Page 103
Woodward instructions page 1......Page 104
Woodward instructions page 2......Page 105
Woodward instructions page 3......Page 106
Woodward instructions page 4 & 5......Page 107
Woodward instructions page 6......Page 108
Woodward instructions page 7......Page 109
Woodward instructions page 8......Page 110
Woodward instructions page 9......Page 111
Citation preview
Originally published in the Horological Science Newsletter – Issue 2001-2 pages 2-4
A fresh look at W5 Philip Woodward
Good news has lust reached me concerning W5, my fifth and final attempt at making an all-mechanical precision clock1. It was completed in 1985 and has served as the workshop regulator of Anthony Randall, the marine chronometer specialist, since 1994. Its timekeeping has improved rather than deteriorated over the years, probably due to the ageing of the invar rod of its master pendulum. After having warned me beforehand that W5 was doing remarkably well, Anthony wrote to me as follows in a letter dated 11th April 2001. I am really delighted to advise you that the 100 days are up! The seconds hand of W5 has not strayed away from the starting zero second division by more than +1/4 or -1/ 2. It has, therefore, shown GMT to within these limits during the entire period of elapsed time without any correction, the application of a rate or any other kind of applied correction, manipulation or subterfuge of any kind whatsocver2. The test started on the 27th of December last. The seconds hand showed -1/8. Today it shows -1/2. The only misfortune that has happened during the intervening 105 days is that on the 3rd March I let the clock stop by failing to wind it. However, I was able to start it again with the hand showing the same small error as for the previous three days. WS was completed in 1985. Since then it has been running almost continuously and with no maintenance other than lubrication of the count wheel, not counting a couple of breaks for transport, first to the Royal Greenwich Observatory where it was a candidate for public exhibition. At the crucial time, however, the clock galleries were to be given a new look and the number of clocks on permanent exhibition greatly reduced, the better to highlight the observatory's most important pieces. In consequence, and after a brief sojourn in a cellar (the wont of museums) W5 was de-selected. The original plan had been for W5 to serve as an educational exhibit illustrating the master-and-slave principle of "free pendulum" clocks, notably the Shortt clocks used for standard time in Great Britain during the inter-war years. I believe it would have demonstrated the principle more clearly than the Shortts themselves, which rely on two seemingly unconnected pendulums, one hidden in a vacuum cylinder and the other in an ordinary Synchronome cabinet, physically separate though electrically connected. From ________________________________________________________________________ This clock is described and illustrated in My Own Right Time (Oxford University Press 1995). 2 The writer is evidently well aware of the devious methods of horological scientists! 1
1
Originally published in the Horological Science Newsletter – Issue 2001-2 pages 2-4
personal experience I know that, even in its running state, the principle of a Shorts clock can be obscure to museum visitors. Jonathan Betts, Curator of Horology at Greenwich, regarded W5 as a potentially useful exhibit to model the Shorn principle because both of the pendulums are in the same cabinet where their interaction can easily be observed. No electricity is used, and the fact that the pendulums swing with different periods of vibration serves to excite the attention of the viewer. Public exhibition was not to be, and in the event I removed WS into the private custody of Anthony Randall. That a horologist of his stature should have been willing to set it up as his workshop regulator did me even greater honor than had already been paid by Jonathan Betts, whose original plan had failed through no wish of his own. I am now old enough to view all these matters without any trace of modesty, false or otherwise, and can only say that I enjoy a sense of satisfaction that W5 should be appreciated by two professional horologists of world renown. For practical use, Anthony Randall expects a workshop regulator to indicate the right time to within a fraction of a second without the need for making allowances of any kind. (He checks his clocks daily by eye and ear to a nominal accuracy of an eighth of a second using the radio time signal transmitted from Rugby England.) However, clocks being what they are, something has to give and for W5 it cannot be the hands. Altering the seconds hand upsets the relative phase of its pendulums and causes the clock to stop or even to 'crash'. Any waywardness, therefore, must be corrected by altering the weight on the master pendulum's regulating tray. Whenever necessary, Anthony effects these adjustments by adding or subtracting small pieces of metal foil from the tray. It is unfortunate that \R'5 should require winding before the lapse of seven and a half days. In the actual data which Anthony has recorded daily for over six years, there are necessarily some gaps, and some stops and restarts caused by absences of longer than a week. Truth to tell, the case was designed for another clock and is slightly too small for W5. It takes eight days for the weight to bottom in the case, but to guard against a gradual fading of the driving power as the springs of the Harrison maintaining power relax, I incorporated stopwork which abruptly disconnects the impulsing mechanism for both pendulums half a day earlier. Without this device, there would be a danger of the escapement remontoire acting sluggishly, which could result in fairly severe damage (broken impulse roller pivot or cracked jewels). The same danger is avoided in the Shortt clock by 'give' in the bracket for the impulse roller, but I lacked either the patience or the skill to implement this solution. For the record I show, below, data for the 15-week period from December 27th 2000 to April 11th 2001 inclusive, extracted from Anthony Randall's log sheets XXII and XXIII. Squares () indicate days on which no observations were made, and the triangle (∆) is the break on March 4th referred to earlier in his letter. This table should be read horizontally, each line representing two weeks of data, and the units are seconds.
2
Originally published in the Horological Science Newsletter – Issue 2001-2 pages 2-4
Errors of the seconds hand of W5 observed daily by AGR over a 15-week period Note: these figures are not rates W -1/8 0 0 +1/8 0 -1/8 0
T F S S M T W T F S S M T 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1/8 -1/8 -1/8 -1/8 -1/8 -1/8 -1/8 -1/8 0 0 0 0 0 0 0 0 0 0 0 0 +1/8 +1/8 +1/4 +1/4 +1/4 +1/4 +1/4 +1/4 +1/4 +1/4 +1/4 +1/4 +1/8 0 0 0 0 0 0 0 0 -1/8 -1/8 -1/8 -1/8 -1/8 ∆ -1/4 -1/4 -1/4 -1/4 -1/4 -1/4 -1/4 -1/4 -1/4 -1/4 0 0 0 0 0 0 0 0 0 0 -1/8 -1/4 -1/4 -1/4 -3/8 -3/8 -3/8 -1/2 -1/2 -1/2
I do not kid myself that this is a very great achievement, as it took six years to turn up! Like so many other hopeful enthusiasts, I did originally set out to break all records for accuracy - or at least to achieve something surprising - and was crestfallen when, after so much thought and work, the timekeeping of W5 seemed to be no great shakes, though it has steadily improved with age. With a rod of fused silica in place of invar for the master pendulum I am inclined to think that the story would have been very different, and I have been living in hopes that some younger enthusiast might follow the design principles of W5 with just such improvements in mind. It cannot be too difficult to make, for otherwise I could never have made it with a drill press, a micrometer and a watchmakers' lathe with no slide rest. All the lathe work was done with a hand graver. Here I find myself in a slight quandary. Horologists do not like copying a design, screw for screw, and I would be the last to wish it. To my way of thinking, that would be model engineering. However, one enthusiast in Australia (with family roots in Ipswich, England) did ask me for detailed drawings of W5, which I could not immediately supply because I did not have any such drawings myself. As he was prepared to commission a set, I did the best I could with Indian ink on squared paper and sent the drawings off, keeping only poor photocopies for myself (on which the squares did not come out). They were received, but the gentleman concerned found them too challenging and I have been unable to re-establish contact with him. I fear he may now have passed away. In writing the book called MORT, my aim was to try a different tack by giving what I thought to be sufficient information for anybody to make their own version of W5 with all the improvements that would spring from the application of fresh minds. Several readers have expressed an interest in just such a project, but have told me the information provided in the book is not really sufficient. I am not at all clear where the middle course lies. I can only say that the harnessing of a slave pendulum is fun to make, fun to watch when made, and celebrates the principles of the most accurate pendulum clocks which were ever used for observatory timekeeping.
3
~-
,ii I \
\
I
\
(\. c· )----- --/
--
.•
47
CLOCKS
A horological adventure Part2
Philip Woodward describes his double gravity escapement and mechanica l remontoire
M
y AIM, as readers of Part I wi ll remember, was to design
< (
and build a clock for the home which wo uld mode l the
J
principles of the famous Shortl frcc-
pcndu lum clock. I would sac rifice the vacuum - and with it moS t of the pendu lum's 'freedo m· -and I would deny myself the use of e lectricity. Some people tak e kindly to elec tricity in clocks. but I am not of their number. I like to be ab le to see what is going o n. At first gla nce , the unusual feature of my clock is the sight of two pendu lums swinging side by side in different rhythms. The master pendulum
c
-c
makes seven swings to every ten of the
slave, which is a half-seconds pendulum . You ca n tell visitors with some truth that the shorter pendu lu m controls the seconds hand , and the lon ger one the minute hand . Every ha lf a minute they ha ve to be synchronised. The real purpose of the slave is to release a gravi ty arm at regular intervals so that the master pendulum receives its impulses without having to ask fo r th em (fi gure I ). The inte rval between impulses is traditiona lly and' convenient ly 30 seco nds. I ha ve made clocks with lo nger intervals, even as long as four minutes, but this time I had decided to bow to convention. And now come the real questions . How will the gravity arm be reset when it ha s fall en off the master pendulum's impulse roller? And how will th e remontoire be combined with the clockwork which drives the slave? It is perfectly fc Philip Woodward's double pendulum clock. The master pendulum on the lert carries an aneroid pressure compensator underneath the bob.
47
48
CLOCKS
0
f igure I : Shortt clock impulse wheel
and gnnily arm (slightly simplified).
Mudge, inventor in 1759 of the lever escapement for watches. The lever d iffered from all its predecessors in a ll owing the balance to reach the sens itive extremes of swing with out touching the escapement al all. Fo r pendulum clocks, detachment is much more dirticult to achieve, and all the best known pendulum escapements arc in con tact with the pendulum virtually continuously. The pursuit of hig h prec isio n in pendulum clocks took ano ther path, that of the remon1oire escapement, so called
because the impulse is given by an arm
The Shortt free-pendulum in the Science Museum, London.
which has to be reset (remounted ) after every impulse in read iness fo r th e next. During an impulse , the a rm is impelled by gravity o r a spring of its o wn , and is iso lated fro m the wheel work of the cl oc k. The force applied to the pendulum should therefore be exact ly repea ted for every impu lse. Th o mas Mudge was a lso a pionee r of the remontoire escape ment for pe ndulum clocks, a line of evolu tion whic h was to culminate in Lo rd Grimthorpe's gravity escapement for Big Ben. In these esca pements, there is usuall y a pai r of g ravity arms , and the pendulum is a lways in contact with o ne o r o ther of them, even at the extremes of swing. It is argued that this does not count as interference because the forces arc inva riable and the re is isolation fro m the clockwork, but unfortunately the isolation was never complete. The pe ndulu m a lways seems to have been called upo n to unlock the scape w heel to rese t the: gravity arm a ft er use. Th e introduction of electrici ty into clockwo rk cha nged all this, and ye t, in the most successfu l of the observatory pendulum clocks, the act ua l impulse con tinued to be delivered by a purel y mech anica l a rrangemen t. In the Shom cl ock [3][4) , the tip of a ho rizonta l arm is d eposi ted o nce every 30 seco nds o n a little idler wheel o r impulse roller pi voted on the pendulum (figure 1). As the pendulum swings away and ca rries th e ro ller with it, the arm rolls down under its own weight and fall s o ff. That is the impulse. No thing is
touching the a rm while it is in contact with the pendulum , and no thing else co ntacts the pendu lu m at any time. A conj u ring trick well worth commemorating! How. it may be asked, can th e gravi ty arm be dropped o n to the im pu lse roller at just the right m o meni, wit hou t consta ntl y monitoring the pendulu m 's position a nd so disturbing it'? That would indeed be impossible (without usi ng photo-electric cells. which were not in ge neral use when the Shortt clock was designed). As with all good conjuring tricks. the q uestio n itself puts one o ff the scent. Eve ry time the gravity arm foil s away from the impulse ro llc:r . the pos iti?n of the pend ulum iJ known exact ly. Afte r bei ng dectricall y reset, th e a rm has only 10 be held up for a carefully timed in terva l, a litt le over 29 seconds. and then re leased agai n. As a coun1-down 1imer, one of the Synch ro no me Company's o rdinary ekctric mas1e r clocks was used . This was qui te na1ura l, as 1he Shortt free-pendulum was manufacturd by that sa me company. In the Shortt system, the Synchron o mc 'maslcr' became the slave to a much greate r maste r. Another m isleadi ng assumption in the question is that the gravity a rm is deposi ted o n the frec:-pendulum' s impulse ro ller a t exal·r/y the right mo ment. It ca nno t be, for the slave clock is less accurate than the ma ster . Th e tiny disc repancy which acc um u lates in hnlf a minute has to be abso rbed in the short dead ru n of the gravity arm o n the ro ller before it begins its desce nt.- This is insignifica nt, but such discrepancies must not be a ll owed to accu mulate for any greater length of time or th e 1wo pendu lum s wou ld even tu a lly get ou t of step. To keep the slave under p roper con trol, it is equi pped with a 'h it-and -m iss' sy nchroniser wh ic h is brough t into play every half minute. But before looking a t th is. le t us tiike a bird's eye view of the sys tem as a who le. Figure 2 is a schemat ic diagram showing the flow of co ntrol in th e system . Th e sla ve pendulum o perates a co unter, which is th e
49
CLOCKS 15-tooth ratchet wheel of the standard Synchronome clock. Like the free-pendu lum, it has a gruvi ty arm with ail electrical remon toire. Once in eve ry revolution o f the count wheel, the a rm is unlatched mech anically. On completion of impulse, the electric cu rrent which resets this a rm also operates the re lease mechanism for the master's gra vi ty arm. When this has fallen off its roller, its rescu in g current operates the hit-and-miss synchron ise r on the slave pendulum . It can be seen that the slave suffers from three sources of mechanical disturbance - from counting, from being impulsed and from sy nchro nisat io n. As agains t th is, the master has o nly its impulsing to tolerate. The whole arrangement is a fascinating example of what we wou ld nowadays regard as a closed-loop contro l system. As it is the component wh ich completes the feedb ack loop for the system as a whole. the synchroniser can be regarded as the key c lemen t in the Shortt clock. Hiland -miss sync hron ise rs can be made in many shapes and forms. They a re simple, reliab le and fascinating. Shortt himself suggested severa l forms in his original patent specifica tio n(5], and figure 3 shows the one he eventually used. The synchro nisat io n signal energises th e electromagnet M which attracts the armature A downward as the pendulum app roaches from the ri ght. If it arrives late(sla ve folling
behi nd) the a rmature is trapped under the ben t end of the leaf spring s, so that for o ne left -hand excursion of the pendulum, the sp ring flexes a nd adds to the force of gravi ty. This causes a n immediate gain of the orde r of a hundredth of a second. If the pendulum arrives ea rly, on the other han d, ii can be left a lone because it is adj usted to have a losing rate and wi ll co rrect itself. The points of the synchroni ser will then miss and simply brush past each other. The first matt er demanding atten tion by th e would-be modeller of the Shortt clock is the relative timing of the re leases and resets shown on the diagram (fi gure 2). In the Shortt clock, the time from A to B is about 0.8 seconds. The master's impulse las ts about 0.35 seconds only, a nd the remaining 0.45 seconds is taken up by a slow acting med1anh:al resening of the delica te gravity arm before the elect romagnet takes over and rese ts th e reseller. As the connexions between master and slave are electrical a nd immedia te. the time of 0.8 seconds from A to Bon the mas ter side of the house is also 0.9 seconds from a to b o n the slave side, an interva l which happens to be ideally suited to a one-second slave pendu lum. At the e nd of its impulse, the sla ve is j ust past the centre of its swing, and after the lapse of just under a second it will be back at centre again , which is exactly where the hit-and-miss synchroniser wor ks best.
count
release arm
release arm
reset arm
A
reset arm
a
8
hit or miss
b
t+------t
Figure 2: Flow of control in a Shortt clock.
In a ny home-made replica of the Shortt system us ing a one-second master pendulum, these ti mings would probably not be convenie nt. At normal at mospher ic pressure, the master's impulse wou ld have to be ma ny times larger than in va1..·uo, and the gravity arm correspondingly sturdy. Intricate buffered resetting is then unnecessary, and the time from A to B would be reduced by about half a seco nd . The slave is then in quite the wrong phase for the synchroniser. The difficulty is easi ly avoided by the use of a half-seconds pendulum as the slave. Hope-Jones (4] is honest enough to admi t tha t th is did not finall y dawn on him unti l 1935,somc 14yearsafterthedate of the first Sho rtt clock. A half~secon ds pendulum is attractive for another reason. As the count wheel advances by o ne too th for eac h double swing, a hand on the same a rbor registe rs whole seconds - though admitted ly with on ly 30 to each revolution. As a lready remarked, my own model of the Shortt clock avoids the use of electricity altogether . which rules o ut any possibility of physically separate master and slave clocks, as in the Shortt system. The two pendu lums a re in the ve ry sa me cabinet, which immediately suggests the danger of unwanted interaction. It is well known that pendulums of th e same length will tend to draw int o sync hron ism if they can fee l each o the r's presence th rough a common mounting, and it would be self-defea ting if the slave ixndulum were to exert any sort of influence o ver the master. Similarly, a one-second maste r pendulum could be quite vu lnerable to the proximity ofa halfsecond pendulum , but there isa simple way round the difficulty. Although the Sho rtt free-pe ndulum must be ready for its impul se every half a minute, nobody knows how many swings it made in that time. It actually mak es 15 double swin gs, but it could just as well be shortened to make 16. with a slightly longer dead run a long the impulse ro ll er. In my own clock I have chosen 21 who le vib rations between impulses for the maste r pendul um while the slave makes 30. As a way of avoiding unwanted inte raction, the ra ti o 7 to 10 is a ltoget her safe r than the close harmonic relation of I to 2. The master pendulu m is thus about half the length of a seconds pendulum, saving space at the expense of a somewha t excess ive dead run preceding the actua l impulse. First contact between arm and roller occurs a t the extre me of the swi ng. Having fixed on the lengths of both pendulums to fit into a case meas uring I Sin by 30in, I could start th inking about the design of the actual c lockwork . The first question is whether to d rive the master and slave pendulums from separate trains. The tempta tion to go ahead with two independent movements is strong , for it is difficult a t first to th ink of a ny better idea. I am now very glad I resisted it, because it led to a much sim pler system in the end. The princi pl e, which I sha ll be developing fully next month in Pa rt 2, is to use one a nd the t>
CLOCKS
50
A
s
Figure 3: Shortt's hiland-miss synchronizer.
same gravity arm for both pendulums. This leaves the clockwork with just a single task, which is to operate the remontoire. But what kind of remontoire? Here there is wonderful scope for invention. There must be dozens of answers to the question, and I D shall present just one of them.
References and acknowledgement I. D A Batem·an, 'Pendulum Design- Part I, Clot'ks, February 1984. 2. Lord Grimthorpe, C/ol·ks. Warr.:he.)· and Bells. 8th edition, London 1903 (reprinted by EP Publishing, 1974). 3. FA B Ward, Time Measurement, Science Museum, London 1970. 4. Frank Hope-Jones, Ele1.·trica/ Timekeeping, 2nd edition, London 1949. 5. W H Shortt, Patent Specilication 1978, 14 June 1922. Pictures of the Shortc Free-pendulum and its Synchronomc slave are reproduced by permission of the Trustees of the Science Museum, London, and are Crown copyright.
Synehronome slave of the Shortt freependulum clock in the Science Museum, London.
0
0
0
0 0
0
0
0
0
0 0
0
0
0
A
Section through winding arbor and maintaining work SECTION A-A SCALE 1 : 1
Scans of original sketches provided by Philip Woodward:
1
2
3
4
5
6
7
8
9
10
11
12
BA and Metric (ISO) equivalents to UNC and UNF screw threads 00-90 UNC ≈ 13 BA or M1.2 0-80 UNF ≈ 11 BA (.001" smaller) or M1.6 (.003" larger) 1-72 UNF ≈ 9 BA (.002" larger) or M1.8 (.002" smaller) 2-56 UNC ≈ 8 BA (.001" larger) or M2.2 (.001" larger) 3-48 UNC ≈ 7 BA (.001" smaller) or M2.5 (.001" smaller) 4-40 UNC ≈ 6 BA (.002" smaller) or M3.0 (.006" larger) 5-40 UNC ≈ 5 BA (.001" larger) or M3.0 (.007" smaller) 6-32 UNC ≈ 4 BA (.004" larger) or M3.5 8-32 UNC ≈ 3 BA (.003" smaller) or M4.0 (.007" smaller) 10-32 UNF ≈ 2 BA (.005" smaller) or M5.0 (.007" larger) notes:
size differences quoted above refer only to major diameters -- differences in pitch and thread angle result in greater differences in core diameters and consequently strength size differences quoted above refer to how much larger or smaller than the UN thread the BA or metric one is; thus 2 BA (.185" in diameter) is .005" smaller than 10-32 (.190" in diameter) not all threads referred to above are "standard", especially the odd numbers within the BA series
18
)
(/
...
-
•
0
~·
FC
\
...-..,.-
-(.
..
-
s•
-
-----------
- --
- -
\
\
\ \
'
'' -.., -
_.. 0
-
'
'
'
.._ -i.--
,
•
,'
-
-- -
--
-
--
-
-
--
--
-
-
-
I
- --
W5 Drawing corrections By Bob Holmström While preparing an article on W5 for the Horological Journal, Philip Woodward has reviewed my HSN drawings using copies of the sketches I was working from plus additional notes and drawings from his files. Several errors in my drawings have been discovered and are detailed below. Last issue I reported an error in the location of the holes at the top edge of Plate A but I still reported the wrong information! Plate A is should be 7.0625” tall, not 7.3125 as listed in part 1 of this series. The position of the 5 holes at the top of the plate, labeled angle 1 through angle 5 become: (note -includes changes in slave pendulum position described below) Location Angle 1 Angle 2 Angle 3 Angle 4 Angle 5
XDIM -3.875 -2.500 0.125 1.500 3.375
YDIM 3.250 3.250 3.250 3.250 3.250
SIZE 10-32 UNF 10-32 UNF 10-32 UNF 10-32 UNF 10-32 UNF
Barrel: In HSN 2003-1, I stated that the barrel was 1.25” diameter and that the effective circumference for 1/32” cable was 2.325”. The correct statement should read that the barrel was made from 1.25” diameter stock and the effective circumference is 3.325” which gives a final barrel diameter of 1.058”. The movement support pillar should be 6.75” from the internal edge of the case not 6.00 as shown on page 16 of 2003-3. Slave pendulum axis location - The slave pendulum vertical axis should be located 0.8125” to the right of the center axis of the plate rather than 0.8333” as I incorrectly concluded. This changes the location of holes Angle 3 and Angle 4 – the corrected values are included in the table above. This also changes the distance between hole pairs on the facia angle from 4.021” to 4.000”. This will also change the signal box wires and synchronizer by a similar amount. Ear & detent– The triangular ear is slightly the wrong shape, which puts the lifting pin too low and makes the detent arm thicker than it need be. The correct dimensions are shown on the next page. Pillar locations and rear plate dimensions are bit different from Philip’s but he feels that they should still function correctly. Principle coordinates – The good news is that Philip confirmed that all of the principal coordinates as measured from the center arbor were correct. I apologize for any inconvenience these errors may cause to constructors of W5.
18
W5 Drawing corrections By Bob Holmström Philip Woodward has continued to prepare an article on W5 for the Horological Journal which is scheduled to appear starting in February of 2004. Several additional errors in my drawings have been discovered and are detailed below. In the last issue two issues I reported an error in the location of the holes at the top edge of Plate A but I still reported the wrong information! Plate A is should be 7.0625” tall, not 7.3125 as listed in part 1 of this series. The position of the 5 holes at the top of the plate, labeled angle 1 through angle 5 should be. The YDIM should be 3.50 not 3.25!! Location Angle 1 Angle 2 Angle 3 Angle 4 Angle 5
XDIM -3.875 -2.500 0.125 1.500 3.375
YDIM 3.50 3.50 3.50 3.50 3.50
SIZE 10-32 UNF 10-32 UNF 10-32 UNF 10-32 UNF 10-32 UNF
The weight of the barometer compensation weight should be 40 grams not 4 grams as listed in part 3, page 17 Philip has informed me that the springs on the maintaining work (winding arbor assembly) are the wrong way around. I will redraw the assembly and publish it in the next issue of HSN. I apologize for any inconvenience these errors may cause to constructors of W5. If you are building a clock based on W5 please let me know your name and contact information so that I can keep you informed of any additional corrections. Bob Holmström [email protected]
14
master pendulum
slave pendulum count wheel
scape wheel
i
0
0 0
t
h
gravi ty lever master impulse rol l er
synchronizer spring
Instructions prepared by Philip Woodward for the current owner of W5 – these are scanned images of the documents.
1
2
3
4
5
6
7
8
W5 Construction Details by Bob Holmström Part 1 Philip Woodward completed his all-mechanical precision clock W5 in 1985. It was initially intended to be an educational exhibit demonstrating the master-and-slave principle of “free pendulum” clocks. Instead, since 1994, it has become the workshop regulator of Anthony Randall. The performance of W5 has been documented in HSN 01-02. In that article, Philip stated that he had hoped that others would pick up and improve upon the design of W5 but that has not happened for a number of reasons. One possible reason is the lack of information on the construction details of the clock. The purpose of this article is to attempt to describe W5 in sufficient detail to enable construction. I am grateful to Philip Woodward for providing copies of his sketches, photos, and detailed adjustment notes for use in preparation of this article. I have chosen to make drawings of W5 using a 3D CAD drawing program. This document can only show 2 dimensional output from the 3D model – I will try to find a way to place rendered 3 dimensional drawings in the Web as the project progresses. Hopefully, HSN readers will be inspired to construct their own copies and I will be happy to report any progress submitted. Overview and nomenclature: W5 is based on a remontoire escapement as shown in Figure 1. p = timing pin s = sensor arm i = slave impulse hook t = tab for synchronizer hook h = synchronizer hook For details on the operation and theory of W5, see the reference list at the end of this article. The figures on the next page shows a detail from the 3D model at this point. Most of the escapement is in place but the maintaining work, stop work, motion work and dial still need to be added. Figure 1
1
2
3
The movement of W5 is constructed on a framework based on a main plate and several sub-plates supported on pillars as shown in figure 3. Drawings of the plates are shown on pages 6 through 11. Plate A B C D E F G H J
Quantity 1 1 1 1 2 2 1 1 1
Width 8.250” 2.679” 3.000” 2.500” 0.250” 2.250” 0.375” 1.375” 1.250”
Height 7.0625” 4.000” 5.000” 3.000” 0.750” 0.3125” 3.375” 1.732” 2.250”
Thickness .125 .094 .094 .094 .050 .050 .094 .094 .094
comments Main plate Gear train Winding arbor Winding arbor Back stop arbor Count wheel Remontoire & detent pivot Motion work Winding arbor
Clock Pillars: Pillars are located and fastened to Plate A with threaded stock. Plates are attached to the other end of the pillars using spigot and countersunk fastener. Alternative fasteners are used where plates are too thin for countersunk fasteners. Pillar B C D E1 E2 F G H J dial
quantity 4 4 3 2 2 2 2 2 2 3
diameter .3125 .375 .375 .1875 .1875 .1875 .3125 .3125 .375 .375
length 1.03125 1.5625 .875 .1875 .4875 .4375 1.15625 1.15625 1.15625 1.906
Internal thread 6-32 10-32 10-32 2-56 2-56 2-56 6-32 6-32 10-32 10-32
Bearings & bearing support blocks: Gear train arbors are supported using flanged ball bearings attached to plates using bearing support blocks. Bearing support block drawings are shown on page 11. arbor winding arbor center arbor third arbor Forth arbor Remontoire arbor rear Remontoire arbor front
Shaft size 3/16” 3/16” 3/16” 1/8” 1/8” ?
4
Bearing quantity 4 2 2 2 1 1
5
Location center arbor winding arbor wa1 wa2 wa3 wa4 third arbor ta1 ta2 ta3 ta4 fourth arbor fa1 fa2 remontoire count wheel gravity lever synchronizer detent BP1 BP2 BG1 BG2 B3 B4 C1 C2 C3 C4 D1 D2 D3 E1 E2 F1 F2 H1 H2 J1 J2 angle 1 angle 2 angle 3 angle 4 angle 5 case 1 dial 1 dial 2 FPC1 FPC2 FPC3 FPC4
Hole Table for Plate A X Dim
0 2.125 1.75 2.125 2.5 2.125 0 -0.375 0.375 0 0 -0.997 -0.997 -0.997 -1.547 0 -0.75 -0.5 -1.624 -0.25 -1.2 -1.547 -1.547 0.632 0.632 1.25 3.75 1.25 3.75 1.75 1.75 3.75 -0.938 -0.938 -0.969 0.969 -0.687 0.313 1.75 1.75 -3.875 -2.5 0.125 1.5 3.375 0 -2.448 -2.448 -0.952 -0.077 1.75 2.625
Y Dim
0 0 0 0.375 0 -0.375 1.042 1.042 1.042 1.417 0.667 1.116 1.491 0.741 1.563 2.25 0.563 0.375 1 0.281 0.75 2.386 -0.614 2.386 -1.114 2.386 2.386 -2.114 -2.114 1.25 -1.25 0 2.938 2.313 1.881 1.881 -0.03 -0.858 0.875 -0.875 3.5 3.5 3.5 3.5 3.5 -2.5 2.841 -2.841 -1.75 -1.75 -1.75 -1.75
Size DIA 0.250" THRU DIA 0.250" THRU 4-40 UNC-2B 4-40 UNC-2B 4-40 UNC-2B 4-40 UNC-2B DIA 0.250" THRU 4-40 UNC-2B 4-40 UNC-2B 4-40 UNC-2B 4-40 UNC-2B DIA 0.188" THRU 4-40 UNC-2B 4-40 UNC-2B DIA 0.188" THRU DIA 0.188" THRU DIA 0.125" THRU DIA 0.029" THRU DIA 0.031" THRU DIA 0.094" THRU DIA 0.094" THRU 6-32 UNC-2B 6-32 UNC-2B 6-32 UNC-2B 6-32 UNC-2B 10-32 UNF-2B 10-32 UNF-2B 10-32 UNF-2B 10-32 UNF-2B 10-32 UNF-2B 10-32 UNF-2B 10-32 UNF-2B 2-56 UNC-2B 2-56 UNC-2B 2-56 UNC-2B 2-56 UNC-2B 6-32 UNC-2B 6-32 UNC-2B 10-32 UNF-2B 10-32 UNF-2B 10-32 UNF-2B 10-32 UNF-2B 10-32 UNF-2B 10-32 UNF-2B 10-32 UNF-2B DIA 0.250" THRU 10-32 UNF-2B 10-32 UNF-2B 8-32 UNC-2B 8-32 UNC-2B 8-32 UNC-2B 8-32 UNC-2B
6
I have chosen to use “inch” measurements and UNC/UNF fasteners because it was more convenient for me and CAD software does readily support dual dimensioning. Part 3 includes a table showing BA and Metric equivalents to UNC and UNF screw threads
7
8
9
10
11
References: Philip Woodward, Kater’s Escapement, Antiquarian Horological Society, December 1985, pages 573581 Philip Woodward, A horological adventure Part 1, Clocks Magazine, January 1986, pages 47-50 Philip Woodward, A horological adventure Part 2, Clocks Magazine, February 1986, pages 47-50 Philip Woodward, W5, Horological Journal, October 1990, cover photo Philip Woodward, My Own Right Time, Oxford University Press, 1995 Philip Woodward, A fresh look at W5, HSN 01-02, May 2001, pages 2-4 An animated version of the W5 escapement is available at: http://www.fionnay.ukgateway.net/w5esc.html
12
W5 Construction Details by Bob Holmström Part 2 This installment covers the winding arbor and most of the components of the escapement. The “signal box” which is connected to the slave pendulum and the free pendulum roller assembly will be covered in the next installment along with details of construction for the two pendulums. I have chosen to use “inch” measurements and UNC/UNF fasteners because it was more convenient for me and CAD software does readily support dual dimensioning. Philip’s sketches were done in units of 1/16” with occasional reference to 1/32” and 1/64”. The model was constructed using his dimensions and has been converted to decimal with numbers rounded to xx.xxx . A later installment will include a table of fasteners sizes inch/metric/BA for conversion purposes. GRAVITY LEVER The gravity lever is formed from two parallel 0.05” thick brass plates identical in outline. The decorative holes in the upright portion are actually for lightness. The two plates are firmly joined in three places, a, b, c below. (a) The second decorative hole is filled with a screw. This is the fixing for a little pillar joining the two "plates". (b) There is a screw near the tip of the gravity lever. Here a 1/8” thick piece of hardened steel is sandwiched between the lever plates. This has hidden dowels and a screw to the front plate. It is doweled and glued to the other plate. This form of construction allows the lever to be disassembled, e.g. to alter its weight. The block of hardened steel is just long enough to be used as the mounting for the safety arm, which must never touch anything, other than in an emergency when tinkering with the clock. It prevents a disastrous run-away, e.g. during detent adjustment. (c) The arbor of the gravity arm is a very tight fit in the holes in the lever plates, though removable with a struggle. There is also an arbor for the ear, and a pin in the nose which is engaged by the hook of the slave pendulum prior to impulse. COUNT-WHEEL Additional notes are included on the count-wheel drawing about material choices. Philip used Perspex (Acrylic or Plexiglass in the USA) for the count-wheel. The wheel has worked well but Philip has some reservations about the material choice, which are expressed in the note below: “I am a bit concerned about Perspex for countwheels. I used it as an experiment because it is light, but experience shows that it needs a trace of oil at regular intervals to prevent sticking. Anthony Randall has found that rubbing the softest “lead” pencil (grade 6B) on the ratchet teeth makes it go for longer. John Wilding has made a properly engineered prototype of my gearless clock, and has rejected my use of Perspex for the ratchet wheel in favour of a metal he understands. He is using an *unlubricated* brass wheel, which I would much prefer.” The Count-wheel anti-friction rollers are Perspex with radiused edges running in polished grooves in the arbor.
1
2
3
4
5
6
7
W5 Construction Details – Part 3 by Bob Holmström with Supplementary Information on W5 supplied by Philip Woodward Introduction The information in these articles is based on drawings commissioned in 1986 by Mr. John Canham of New South Wales, Australia, who wished to make a copy of W5. Since the drawings were prepared, the gravity lever and both of the pendulums were remade with slight changes of design. The rod of the free pendulum can now be unscrewed from the suspension hooks. The gravity lever can be taken apart, the rear face being screwed to the pillars. The tip is of hardened steel with a knife-edge where it contacts the hardened steel impulse roller, which has jewelled pivots and endstones fitted by courtesy of Anthony G. Randall. The flapping ear of the gravity lever is no longer a solid triangle, but hollowed out for lightness. The pivots of the anti-friction rollers have not yet been jewelled, but this would be advantageous. Miscellaneous design data Slave bob The slave pendulum weighs 670g, of which 588g is the bob, supported on a base-plate by a pin through the rod. Regulation was achieved by shallow holes bored on the upper hidden face of the base-plate. No further regulation has been needed. Synchronizer The force needed to extend the hook of the synchronizer is about 1.5g/mm. This adds about 5% to the gravitational restoring force, producing a gain of 2.5% for that excursion of the pendulum. Taking place on average once a minute, the synchronizer produces an average gain of 18s/day. Control can therefore be maintained over a range of ±18s/day between the rates of the master and slave pendulums, which is more than adequate. Slave arc This depends on the energy supplied by the gravity lever, which is the product of the force it exerts and the effective distance over which it acts. Once the arm has been made and its weight fixed, the energy delivered to the slave can be adjusted by sliding the impulse roller bracket up or down the master pendulum rod, at the expense of some slight distortion of the impulsing geometry. The range of reasonable amplitudes (semi-arcs) for the slave is from 2.5° to 3.0°. One tooth of the slave’s count wheel corresponds to 3.3°, so the angles work out theoretically as follows. amplitude 2.5° 3.0°
undershoot 0.85° 1.35°
count tooth
overshoot
3.3° 3.3°
0.85° 1.35°
spare travel 26% 41%
‘Spare travel’ is the fraction of a space the seconds hand overshoots before recoiling to the dial division it is aiming at. Although a count wheel tooth corresponds mathematically to 3.3° of pendulum swing, the minimum arc in practice is more like 3.6° (i.e. amplitude 1.8°) because of the finite thickness of the counting pawl and irregularities in the wheel itself. Escapement adjustment The aim is to permit the clock to go on working when the amplitude of the slave pendulum is minimal, in order to provide the maximum safety margin when the slave loses amplitude through increasing friction at the count wheel. Various adjustments are critical. For instance the angle of the ramp at the end of the sensor arm must not be too steep, or friction here will be excessive. The following train of
1
events occurs every half a minute when the slave pendulum is set to grasp the gravity lever, recoil it to release it from its rest position, and lower it on to the master pendulum’s impulse roller. The angles are those of the slave swinging with an assumed amplitude of 2.5°. The other angles are independent of amplitude. –2.5° Slave pendulum at extreme left of swing –1.8° Backstop arrests recoil of count wheel –1.0° Sensor arm contacts pin on count wheel +1.0° Sensor arm has lifted the impulse hook, causing it to engage with the pin in the nose of the gravity lever +1.65° The ear of the gravity lever drops to its banking in the neck of the lever. Simultaneously, the sensor arm should fall free of the count wheel pin which deflected it. +1.8° Counting pawl escapes upwards to next tooth +2.5° Slave pendulum at extreme right of swing +1.8° Counting pawl begins to move the count wheel forward –1.0° When the slave is at this angle, the master pendulum is at the extreme right of its swing and the gravity lever lands on its impulse roller. –2.5° Slave again at extreme left of swing and gravity lever has begun its descent on the master’s impulse roller. 0.0° Gravity lever has fallen off the impulse roller, and released the escape wheel which resets the gravity lever and flips up the hit-or-miss synchronizer spring. +2.5° Slave again at extreme right of swing 0.0° Slave tab releases the synchronizer spring, if it had hold of it. Hints on shaping of sensor arm 1) If the arm strikes the count wheel pin too soon, it will strike it on the previous swing also. A slight movement may be thought desirable to give a sensitive indication of the slave amplitude, but it does not look right. 2) If the sensor arm has not reached its maximum lift by the time the impulse hook has fully engaged with the gravity lever, untoward pressure occurs between the sensor arm and count wheel pin. This results in loss of energy and may lead to a tiddly-wink effect on the seconds hand. Correct adjustment avoids this. 3) All the wire arms can be rooted in tiny brass blocks with anaerobic adhesive. Application of heat then enables them to be removed and reset. Initiation and maintenance of synchronism Synchronization of the pendulums is maintained automatically, but only if they are close to synchronism in the first place. Damage may ensue if synchronism is lost, as there may be a head-on collision of the gravity lever with the impulse roller, which could break the roller pivots. Correct starting is therefore important. Start with both pendulums at rest. Push the seconds hand forward to about 10 on the dial and set the slave swinging. Then hold the master pendulum to the right of vertical (bob about 15mm to right of center) and wait for the rest of the half-minute until the gravity lever lands on the impulse roller. Then, and not a moment sooner, let go of the master. The explanation of this instruction is as follows. The fall of the gravity lever from the impulse roller sets in train a sequence of events, one of which is to flip up the synchronizer spring momentarily. If
2
the fall of the gravity lever is early, the flip of the spring is early. Normally, the tab on the slave then catches the spring before falling back again. The resulting pull of the spring helps the slave to make up for lost time. However, if the master pendulum is released too early by more than a fraction of a second, the spring falls back before the spring can catch it. The situation then gets worse and worse because of the slave’s losing rate. For safety, the master should be released slightly late, which ensures a sequence of misses until the losing rate of the slave establishes synchronism. Synchronism can be lost in other ways. If the seconds hand is moved manually in an attempt to correct the displayed time, the relative timing of the two pendulums is completely upset. This is due, of course, to their quite different periods of vibration. Another source of trouble could arise from a gradual loss of driving force to the train, such as might occur if the driving weight were allowed to bottom in the case. Any resulting sluggishness in the remontoire action could result in a collision between gravity arm and impulse roller. The stopwork throws the count wheel pawl abruptly out of engagement, so preventing any remontoire action thereafter. It works by the overbalancing of a small weight when the line is nearly unwound. Any future designer of a clock on the same principle as W5 would do well to consider a sounder engineering solution to the above problems. The Shortt clock avoided all possibility of damage from loss of synchronism by a special mounting of the impulse roller bracket. Throughout a normal impulse, Shortt’s roller bracket remains in direct contact with the pendulum rod, but if any much larger force is exerted on the roller, the bracket pivots away from the pendulum rod on the equivalent of a knife-edge and is thereby protected from its relatively huge inertia. Philip Woodward August 2002 --------------A table of BA versus UNC/UNF fasteners is included at the end of this document.
3
4
5
6
7
8
9
BA and Metric (ISO) equivalents to UNC and UNF screw threads 00-90 UNC ≈ 13 BA or M1.2 0-80 UNF ≈ 11 BA (.001" smaller) or M1.6 (.003" larger) 1-72 UNF ≈ 9 BA (.002" larger) or M1.8 (.002" smaller) 2-56 UNC ≈ 8 BA (.001" larger) or M2.2 (.001" larger) 3-48 UNC ≈ 7 BA (.001" smaller) or M2.5 (.001" smaller) 4-40 UNC ≈ 6 BA (.002" smaller) or M3.0 (.006" larger) 5-40 UNC ≈ 5 BA (.001" larger) or M3.0 (.007" smaller) 6-32 UNC ≈ 4 BA (.004" larger) or M3.5 8-32 UNC ≈ 3 BA (.003" smaller) or M4.0 (.007" smaller) 10-32 UNF ≈ 2 BA (.005" smaller) or M5.0 (.007" larger) notes:
size differences quoted above refer only to major diameters -- differences in pitch and thread angle result in greater differences in core diameters and consequently strength size differences quoted above refer to how much larger or smaller than the UN thread the BA or metric one is; thus 2 BA (.185" in diameter) is .005" smaller than 10-32 (.190" in diameter) not all threads referred to above are "standard", especially the odd numbers within the BA series
10
W5 Construction Details – Part 4 by Bob Holmström This installment includes details of the pendulum supports, dials, stopworks, and weight/cable/pulley arrangements. This concludes the construction details portion of these articles. A subsequent article will fill in missing details based on the actual construction of two examples here in Portland and any contributions from other HSN readers. I discovered one major error in dimensions while finishing the drawings. Plate A is should be 7.125” tall, not 7.3125 as listed in part 1 of this series. The position of the 5 holes at the top of the plate, labeled angle 1 through angle 5 become: Location Angle 1 Angle 2 Angle 3 Angle 4 Angle 5
XDIM -3.875 -2.500 0.146 1.521 3.375
YDIM 3.250 3.250 3.250 3.250 3.250
SIZE 10-32 UNF 10-32 UNF 10-32 UNF 10-32 UNF 10-32 UNF
The rest of the holes in Plate A appear to be correct. Please keep me informed of any attempts to build clocks based on W5 – I will be happy to report any progress and/or results in future issues of HSN. Bob
1
2
3
4
5
6
7
8
9
10
11
12
SUPPLEMENTARY INFORMATION ON W5 Introduction The drawings 1-12 were commissioned in 1986 by Mr John Canham of New South Wales, Australia, who wished to make a copy of W5. The modular unit of the design is 1/16 inch, denoted by ‘u’ in the drawings. Since the drawings were prepared, the gravity lever and both of the pendulums were remade with slight changes of design. The rod of the free pendulum can now be unscrewed from the suspension hooks. The gravity lever can be taken apart, the rear face being screwed to the pillars. The tip is of hardened steel with a knife-edge where it contacts the hardened steel impulse roller, which has jewelled pivots and endstones fitted by courtesy of Anthony G. Randall. The flapping ear of the gravity lever is no longer a solid triangle, but hollowed out for lightness. The pivots of the anti-friction rollers have not yet been jewelled, but this would be advantageous. The freehand sketches numbered figures 1-10 were made later for any prospective owner of the original clock. The highly desirable stopwork sketched in figures 9 and 10 had not been made when the drawings were prepared. Miscellaneous design data
Slave bob The slave pendulum weighs 670g, of which 588g is the bob, supported on a base-plate by a pin through the rod. Regulation was achieved by shallow holes bored on the upper hidden face of the base-plate. No further regulation has been needed. Synchronizer The force needed to extend the hook of the synchronizer is about 1.5g/mm. This adds about 5% to the gravitational restoring force, producing a gain of 2.5% for that excursion of the pendulum. Taking place on average once a minute, the synchronizer produces an average gain of 18s/day. Control can therefore be maintained over a range of ±18s/day between the rates of the master and slave pendulums, which is more than adequate. Slave arc This depends on the energy supplied by the gravity lever, which is the product of the force it exerts and the effective distance over which it acts. Once the arm has been made and its weight fixed, the energy delivered to the slave can be adjusted by sliding the impulse roller bracket up or down the master pendulum rod, at the expense of some slight distortion of the impulsing geometry. The range of reasonable amplitudes (semi-arcs) for the slave is from 2.5° to 3.0°. One tooth of the slave’s count wheel corresponds to 3.3°, so the angles work out theoretically as follows. amplitude 2.5° 3.0°
undershoot 0.85° 1.35°
count tooth 3.3° 3.3°
overshoot 0.85° 1.35°
spare travel 26% 41%
‘Spare travel’ is the fraction of a space the seconds hand overshoots before recoiling to the dial division it is aiming at. Although a count wheel tooth corresponds mathematically to 3.3° of pendulum swing, the minimum arc in practice is more like 3.6° (i.e. amplitude 1.8°) because of the finite thickness of the counting pawl and irregularities in the wheel itself.
Escapement adjustment The aim is to permit the clock to go on working when the amplitude of the slave pendulum is minimal, in order to provide the maximum safety margin when the slave loses amplitude through increasing friction at the count wheel. Various adjustments are critical. For instance the angle of the ramp at the end of the sensor arm must not be too steep, or friction here will be excessive. The following train of events occurs every half a minute when the slave pendulum is set to grasp the gravity lever, recoil it to release it from its rest position, and lower it on to the master pendulum’s impulse roller. The angles are those of the slave swinging with an assumed amplitude of 2.5°. The other angles are independent of amplitude. –2.5° –1.8° –1.0° +1.0°
Slave pendulum at extreme left of swing Backstop arrests recoil of count wheel Sensor arm contacts pin on count wheel Sensor arm has lifted the impulse hook, causing it to engage with the pin in the nose of the gravity lever +1.65° The ear of the gravity lever drops to its banking in the neck of the lever. Simultaneously, the sensor arm should fall free of the count wheel pin which deflected it. +1.8° Counting pawl escapes upwards to next tooth +2.5° Slave pendulum at extreme right of swing +1.8° Counting pawl begins to move the count wheel forward –1.0° When the slave is at this angle, the master pendulum is at the extreme right of its swing and the gravity lever lands on its impulse roller. –2.5° Slave again at extreme left of swing and gravity lever has begun its descent on the master’s impulse roller. 0.0° Gravity lever has fallen off the impulse roller, and released the escape wheel which resets the gravity lever and flips up the hit-or-miss synchronizer spring. +2.5° Slave again at extreme right of swing 0.0° Slave tab releases the synchronizer spring, if it had hold of it. Hints on shaping of sensor arm 1) If the arm strikes the count wheel pin too soon, it will strike it on the previous swing also. A slight movement may be thought desirable to give a sensitive indication of the slave amplitude, but it does not look right. 2) If the sensor arm has not reached its maximum lift by the time the impulse hook has fully engaged with the gravity lever, untoward pressure occurs between the sensor arm and count wheel pin. This results in loss of energy and may lead to a tiddly-wink effect on the seconds hand. Correct adjustment avoids this. 3) All the wire arms can be rooted in tiny brass blocks with anaerobic adhesive. Application of heat then enables them to be removed and reset. Initiation and maintenance of synchronism Initiation and maintenance of synchronism Synchronization of the pendulums is maintained automatically, but only if they are close to synchronism in the first place. Damage may ensue if synchronism is lost, as there may be a head-on collision of the gravity lever with the impulse roller, which could break the roller pivots. Correct starting is therefore important.
Start with both pendulums at rest. Push the seconds hand forward to about 10 on the dial and set the slave swinging. Then hold the master pendulum to the right of vertical (bob about 15mm to right of center) and wait for the rest of the half-minute until the gravity lever lands on the impulse roller. Then, and not a moment sooner, let go of the master. The explanation of this instruction is as follows. The fall of the gravity lever from the impulse roller sets in train a sequence of events, one of which is to flip up the synchronizer spring momentarily. If the fall of the gravity lever is early, the flip of the spring is early. Normally, the tab on the slave then catches the spring before falling back again. The resulting pull of the spring helps the slave to make up for lost time. However, if the master pendulum is released too early by more than a fraction of a second, the spring falls back before the spring can catch it. The situation then gets worse and worse because of the slave’s losing rate. For safety, the master should be released slightly late, which ensures a sequence of misses until the losing rate of the slave establishes synchronism. Synchronism can be lost in other ways. If the seconds hand is moved manually in an attempt to correct the displayed time, the relative timing of the two pendulums is completely upset. This is due, of course, to their quite different periods of vibration. Another source of trouble could arise from a gradual loss of driving force to the train, such as might occur if the driving weight were allowed to bottom in the case. Any resulting sluggishness in the remontoire action could result in a collision between gravity arm and impulse roller. The stopwork sketched in Figure 9 throws the count wheel pawl abruptly out of engagement, so preventing any remontoire action thereafter. It works by the overbalancing of a small weight when the line is nearly unwound. Any future designer of a clock on the same principle as W5 would do well to consider a sounder engineering solution to the above problems. The Shortt clock avoided all possibility of damage from loss of synchronism by a special mounting of the impulse roller bracket. Throughout a normal impulse, Shortt’s roller bracket remains in direct contact with the pendulum rod, but if any much larger force is exerted on the roller, the bracket pivots away from the pendulum rod on the equivalent of a knife-edge and is thereby protected from its relatively huge inertia. Philip Woodward August 2002
-
• •• •
•
• - .....---·---,___ --
t)
lfllthlihhiiil
siwt«nllua
of an in.h ("'-)
..
ss~s.- 1.. \esssl~
A"• Alu!.,1.-.1,,,.,Q.\\°':1
""''' 1+1l •·r·
I i .... ch
(_
S'flU)Nt, io1\.iiih is 3~S $1C'l'